

3360
.pdfго, то при одинаковых материалах колес достаточно рассчитать только внешнее (наружное) зацепление.
Особенности расчета заключаются в следующем:
1. При определении допускаемых напряжений коэффициенты долговечности КHL и КFL находят при вращении колес только относительно друг друга:
|
1 |
1 |
Н , |
где |
1 - угловая скорость солнечной шестерни; |
||
|
Н - угловая скорость водила. |
|
|
|
Угловая скорость сателлитов: |
|
|
|
2 |
z1 / z2 ; |
|
V |
|
mz1 |
V |
mz2 |
|
|
|
|
1 |
z1 . |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
1 2 |
2 |
|
|
2 2 |
|
2 |
z2 |
||||||||
2. Межосевое расстояние: |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aW |
49,5(U |
/ |
1)3 |
|
|
|
Kc T1 |
|
|
KH |
|
KHV , |
||||
|
|
c |
a |
U / [ ]2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|||
где U = z2/z1 – передаточное число рассчитываемой пары колес; Кс = 1,1…1,2 коэффициент неравномерности распределе-
= z2/z1 – передаточное число рассчитываемой пары колес; Кс = 1,1…1,2 коэффициент неравномерности распределе-
ния нагрузки между сателлитами; Т1 – крутящий момент на солнечной шестерне, Н·мм;
Ψа – коэффициент ширины венца, Ψа = 0,5 при U ≤ 6,3,
≤ 6,3,
Ψа= 0,4 при U/ > 6,3 (шире делают сателлиты). [ζ]H – допускаемое контактное напряжение, МПа;
КНβ – коэффициент, учитывающий неравномерное распределение нагрузки по длине зуба;
с – число сателлитов.
Полученное значение aW округляют до стандартного значения.
3. Ширина корончатого колеса:
в3 = Ψа · аW,
49
а ширину сателлитов и солнечной шестерни принимают на 2…4 мм больше в3.
4. Размеры солнечной шестерни:
d |
2aw |
. |
|
||
1 |
U / 1 |
|
|
||
Модуль зацепления:
m = d1 / z1.
Полученное значение округляют до ближайшего стандартного значения.
5. Уточняют числа зубьев колес:
z1 |
2aw |
; z2 |
z1 U |
/ |
; z3 |
z1 |
2z2 |
из условия соосности. |
m(U / 1) |
|
6.Проверка условий сборки (выступы зубьев попадают во впадины) и соседства (сателлиты не задевают друг за друга).
7.Проверяются действительные контактные напряже-
ния.
8.Усилия в зацеплении:
окружное: |
|
радиальное: |
|||
F |
2 T1 Kc |
; |
F |
F |
tga . |
|
|||||
t |
c d1 |
|
r |
t |
w |
|
|
|
|
|
|
22.9. Выбор зазоров в исполнительных механизмах
В передаточных механизмах роботов большое внимание уделяют точности позиционирования. В длинных кинематических цепях суммарное действие зазора может привести к значительным кинематическим ошибкам при перемещении исполнительного органа. Зазоры в зацеплении зубчатых колес и кинематических парах могут стать причиной появления неустойчивых режимов, вызвать повышенные вибрации, большие динамические нагрузки и усталостные поломки.
50
Для устранения таких негативных явлений необходима принудительная выборка зазоров в передаточных целях исполнительных механизмов.
Наибольшее практическое применение получил способ выбора (устранения) зазора с помощью замыкающих кинематических цепей, содержащих упругий элемент.
а |
б |
в |
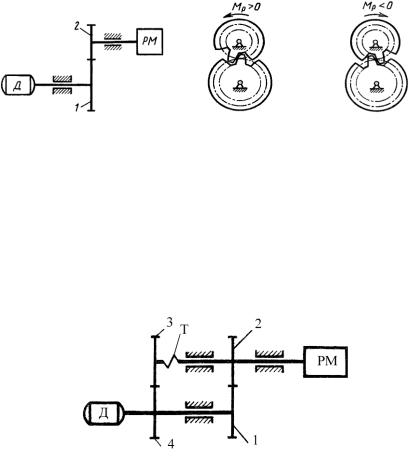
Рис. 22.5. Образование зазора в зацеплении при нагружении передачи
а) схема передачи; б) Мр > 0; в) Мр < 0
При Мр > 0 контактируют профили зубьев слева, а при Мр < 0 – справа. Всякий раз. Когда реактивный момент меняет знак, кинематическая связь колес 1, 2 разрывается, пока не входит в зацепление профили зубьев с противоположной стороны. Боковой зазор должен компенсировать, в том числе и температурное расширение.
Рис. 22.6. Схема принудительной выборки зазора в зубчатой передаче
Для принудительной выборки зазора используют дополнительный замыкающий контур, цель, состоящую из торсиона Т и дополнительных колес 1/ и 2/.
51
Момент загрузки торсиона обозначим через МТ. Он будет постоянным, если будет сохраняться относительный угол закручивания концов «а» и «в» торсиона. Концы торсиона будут двигаться одинаково, если круговое передаточное число Uз.к. замкнутого контура, состоящего из колес 2/, 1/, 1 и 2 будет равно единице:
U з.к. |
U 2/1/ |
U1 2 |
|
z1/ |
|
|
|
z2 |
|
1, |
||||
|
z |
2 |
/ |
|
|
|
z1 |
|||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U / / |
U з.к. |
U |
|
|
|
z1/ |
|
|
z1 |
, |
||||
|
|
21 |
|
|
|
|
|
|
|
|
|
|||
2 1 |
|
U1 2 |
|
|
|
z |
|
|
|
|
|
z2 |
|
|
|
|
|
|
|
|
2 |
/ |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
иначе говоря – передаточное число замыкающей цепи должно равняться передаточному числу основной цепи:
U з.ц. Uо.ц. z1/ |
z1 ; z2/ |
z2 . |
Это условие должно выполняться для любых замыкающих цепей, содержащих торсионы.
22.10.Схема механизма
сзамыкающей кинематической цепью
Если U12 U2 1 , то концы торсиона будут двигаться одинаково. Приняв момент торсиона МТ достаточно большим можно всегда обеспечить М p
, то концы торсиона будут двигаться одинаково. Приняв момент торсиона МТ достаточно большим можно всегда обеспечить М p  М р МТ > 0. При этом, зазор в зацепле-
М р МТ > 0. При этом, зазор в зацепле-
нии всегда будет выбираться левым участком профилей зубьев. В качестве люфтовыбирающих устройств могут приме-
няться пружины, которые устанавливают между элементами разрезного зубчатого колеса. Пружина 3 одним концом упирается в колесо 1, а другим в колесо 2, обеспечивая постоянное прижатие колес 1 и 2 к обоим профилям шестерни.
Такие устройства устанавливают в каждой паре кинематических элементов.
52
Общее усилие пружин должно превышать окружное усилие, действующее на диаметры установки пружин. Каждая из них должна обеспечивать усилие:
F |
2,5M кр |
, |
|
|
|
||
np |
DП |
ш |
|
|
|
||
где Мкр – максимальный крутящий момент, действующий на зубчатое колесо;
DП – диаметр, на котором установлены пружины; ш – число пружин.
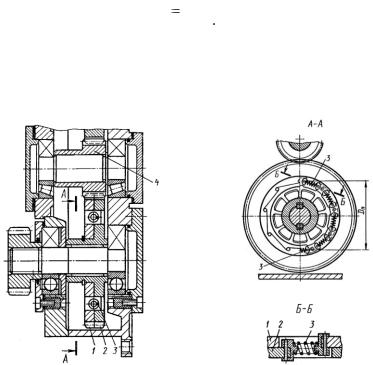
б
а в
Рис. 22.7. Конструкция зубчатой передачи с выборкой зазора посредством пружин передача(а); сечение А-А (б); сечение Б-Б (в)
Выбирать люфт можно за счет установки жестких элементов, осуществляющих предварительное смещение кинематических элементов с последующей их фиксацией с помощью винтов и т.п.
В червячной передаче разрезанное на две половинки по ширине червячное колесо прижимается эксцентриками к обоим профилям витков червяка и фиксируется в этом положении винтом.
53
23. ВОЛНОВЫЕ ПЕРЕДАЧИ
Учебные вопросы
1.Волновые передачи. Общие сведения
2.Схема волновой передачи
3.Достоинства волновых передач
4.Недостатки волновой передачи
Волновые зубчатые передачи находят широкое применение в электромеханических приводах лучших зарубежных и российских промышленных роботах.
Они выгодно отличаются тем, что имеют малое значение мертвого хода, постоянное передаточное число, малые габариты и массу при высокой удельной нагрузочной способности.
Волновые передачи изобретены недавно (В. Мессер, 1959 г.). У волновых передач преобразование движения осуществляется за счет перемещения волны деформаций гибкого звена. Наибольшее практическое применение получили зубчатые волновые передачи (хотя они могут быть выполнены и фрикционными и резьбовыми). Кинематически они представляют собой планетарные передачи с одним из колес в виде гибкого (деформируемого) венца. Передача состоит из трех звеньев: H – генератора волн; 1 – гибкого колесa, выполненного в виде тонкостенного стакана с внешними зубьями (Z2); 2 – неподвижного зубчатого колеса с внутренними зубьями (Z3), (рис. 24.1).
Ведущим звеном является генератор волн H, который деформирует гибкое колесо 1, создавая две волны зацепления с неподвижным колесом 2. При отсутствии генератора волн зубья гибкого колеса не входят в зацепление с зубьями неподвижного колеса 2, и между зубьями имеется равномерный зазор.
При установленном генераторе волн H деформированный зубчатый венец 1 образует как бы два сателлита (две области зацепления), расположенные по большей оси эллипса. На меньшей оси эллипса зацепление колес 1 и 2 отсутствует.
54
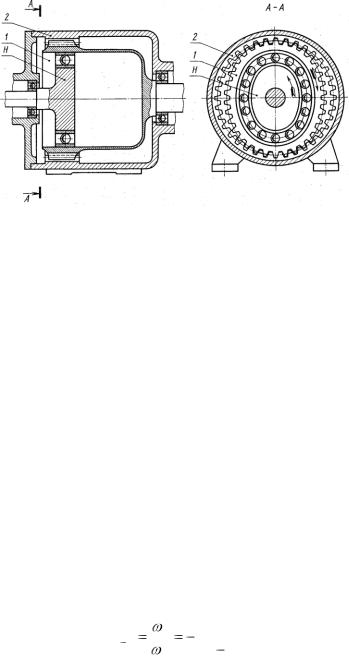
Рис. 23.1. Схема волновой передачи
При вращении генератора волн H гибкое зубчатое колесо 1 обкатывается по неподвижному колесу 2 (образуя две движущиеся волны (двухволновый генератор)) в направлении, противоположном вращению генератора волн H. Возможно применение трехволновых генераторов, но у них выше напряжения изгиба гибкого колеса.
Из-за большой многопарности зацепления (одновременно в зацеплении находятся 25…30% зубьев гибкого колеса 1) волновая передача позволяет существенно повысить плавность зацепления, несущую способность и кинематическую точность. Поэтому волновые передачи в последнее время стали применяться в приводах промышленных роботов.
Передачи, выполненные по рассмотренной схеме (вращается гибкое колесо 1),могут работать в качестве редуктора (КПД 80…90%) или мультипликатора (КПД …70%). Передаточные числа волновых редукторов находятся в диапазоне U ≈
80…300.
Передаточные числа волновой передачи определяется также, как и для планетарных передач по уравнению Виллиса. При неподвижном жестком колесе z3:
1 |
|
z1 |
. |
|
U1 2 |
|
|
|
|
|
|
z2 z1 |
||
2 |
|
|
||
55

Знак «минус» указывает на разное направление вращения ведущего и ведомого звеньев.
При неподвижном гибком колесе 2:
1 |
|
z2 |
. |
|
U1 3 |
|
|
|
|
|
|
z2 z1 |
||
3 |
|
|
||
Разность зубьев колес должна быть равна (или кратна) числу волн:
z2 z1 kzU ,
где U – число волн (обычно U = 2);
kz – коэффициент кратности, обычно kz = 1:
при U < 70, kz = 2; при U < 45, kz = 3.
Волновые передачи (с неподвижным гибким колесом) передают вращение в герметизированное пространство через непроницаемую стенку без применения уплотнений или специальных диафрагм. Это позволяет применять передачу в приводах летательных аппаратов и изолированных химически агрессивных сред.
23.1.Достоинства волновых передач
1.Большая несущая способность на единицу массы (в 3…4 раза выше, чем у передач зубчатых).
2.Возможность получать большие передаточные числа в одной ступени.
3.Плавность и бесшумность работы.
4.Высокая кинематическая точность.
5.Надежность зацепления и малые габариты (при многопарном зацеплении поломка зуба не нарушает работоспособность и точность передачи).
6.Возможность передачи движения в герметизированное пространство.
56
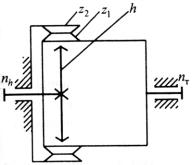
Рис. 23.2. Обозначение волновой передачи на кинематических схемах
23.2.Недостатки волновой передачи
1.Сложность конструкции генератора волн.
2.Повышенные требования к материалу для изготовления гибкого колеса (из-за непрерывного и значительного деформирования).
3.Сравнительно невысокая мощность передачи (до 3…30 КВт).
4. Невысокий КПД (в силовых передачах η ≈ 0,75…0,9). Несмотря на отмеченные недостатки, волновые передачи
все шире применяются в технике и в первую очередь в приводах летательных аппаратов, луноходах, атомных реакторах, прецизионных приборах, промышленных роботах.
24. ПОНЯТИЕ О СИСТЕМЕ ДОПУСКОВ И ПОСАДОК
Учебные вопросы
1.Понятие о взаимозаменяемости
2.Допуски размеров, посадок
3.Квалитеты
4.Система отверстия и система вала
5.Предельные отклонения формы и расположения
57
24.1. Понятие о взаимозаменяемости
При производстве, эксплуатации и ремонте изделий особое значение имеет принцип взаимозаменяемости. Взаимозаменяемость – это свойство конструкции, составной части изделия, обеспечивающее возможность ее применения вместо другой без дополнительной доработки… Патроны, болты, чайки – примеры полной взаимозаменяемости.
Имеет место также групповая взаимозаменяемость. При групповой взаимозаменяемости изготовленные детали сортируют по размерам на несколько групп (допуски деталей в каждой группе уменьшаются). Затем производят сборку изделия из деталей в пределах одной группы. Такая групповая взаимозаменяемость (селективная сборка) широко применяется в шарикоподшипниковой промышленности. При сборке изделий высокой точности этот метод является единственно экономически целесообразным методом обеспечения требуемой точности.
Метод регулирования предполагает сборку с регулирование положения или размеров определенной детали, называемой компенсатором.
Взаимозаменяемость базируется на стандартизации. Допуски и посадки нормируются стандартом ЕСДП – «Единая система допусков и посадок» (ГОСТ 25346-82). Допуски и посадки указывают на чертежах. На их основе разрабатывают технологические процессы изготовления и контроля.
24.2. Допуски размеров, посадок
На рабочем чертеже в первую очередь проставляют габаритные, присоединительные, посадочные, номинальные размеры, предельные отклонения размеров, условные обозначения полей допусков и квалитеты.
Номинальный размер определяет конструктор расчетным или конструктивным путем и назначает из нормального ряда линейных размеров (ГОСТ 6636-69), который ограничивает число применяемых размеров (качество режущего и мерительного инструмента), удешевляя производство.
58