

3360
.pdfСт.3, Ст.4, 25, 30, 40 → а = 321, в = 1,16 Ст.5, Ст.6, 45, 50 → а = 464, в = 3,62.
Для построения кривой 1 диаграммы задаются гибкостью λ > λпред и определяют критическое напряжение по формуле
Эйлера ζкр = Е · π2/λ2.
На участке 2 гибкость задают в пределах λ0 < λ < λпр и критическое напряжение определяют по формуле Ясинского.
Определяем гибкость винта:
l / umin 4 l / d1 ,
где μ = 1/m – коэффициент приведения длины, зависит от способа закрепления концов винта (m – число полувалы изгибы винта).
Опоры скольжения при l/d1  2 и опоры качения с одним подшипником эквивалентные шарнирной опоре (μ = 1,0); гайки с опорой рассматриваются как заделка.
2 и опоры качения с одним подшипником эквивалентные шарнирной опоре (μ = 1,0); гайки с опорой рассматриваются как заделка.
umin |
|
Jmin / A |
– минимальный радиус инерции сечения |
|
(Jmin = πd 4 |
/64; A = |
d 2 |
/ 4 - площадь сечения винта). |
|
1 |
|
|
1 |
|
В зависимости от того, в какую область диаграммы попадает значение гибкости по выражению (), винты делят на три группы:
Таблица 22.1 Влияние схемы закрепления стержня на величину μ
Схема закрепления |
μ |
Схема закрепления |
|
1 |
2 |
|
0,7 |
0,5 |
|
|
|
Винты большой гибкости λ > λпред; в этом случае критическое напряжение определяют по формуле Эйлера ζкр = π2 Е / λ2 и условие устойчивости винта принимает вид:
39
с  2 Е /( 2 [nу ]);
2 Е /( 2 [nу ]);
Винты средней гибкости λ0 < λ < λпр.
Критическое напряжение определяют по формуле Ясинского ζкр = а – в λ.
с(а в ) /( [nу ]) .
Винты малой гибкости λ < ш. Для таких винтов ζкр = ζТ и расчет на устойчивость не проводит, т.к. они устойчивости не теряют.
Передача винт – гайка качения широко применяется в механизмах точных перемещений, в следящих системах и ответственных силовых передачах ЛА и роботов. Такую передачу также называют шарико-винтовым механизмом (ШВМ).
ШВМ имеют ряд преимуществ перед обычными передачами винт-гайка скольжения:
-малые потери мощности на трение качения, позволяющие повысить КПД механизма до 0,9 (сборка без предварительного натяга);
-низкий приведенный коэффициент трения покоя и высокая кинематическая чувствительность;
-малый износ рабочих поверхностей винта и гайки, обеспечивающий высокую точность и равномерность поступательного движения;
-надежная работа в широком диапазоне температур в ва-
кууме.
К недостаткам ШВМ относят относительную сложность
итрудоемкость изготовления (особенно операции шлифования специального профиля резьбы гайки и ходового винта).
Усилие между винтом и гайкой передается через шарики, которые перемещаются в винтовых дорожках качения, выполненных на винте и гайке. Для непрерывной циркуляции шариков концы рабочей части резьбы в гайке соединены возвратным каналом. Обычно в гайке предусматривают три таких независимо циркулирующих группы шариков.
40
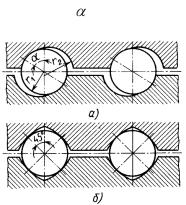
Наибольшее распространение получил полукруглый профиль канавок с радиусом, превышающим на 3…5% радиус шариков, и с углом контакта = 45° (рис. 22.6 а).
Рис. 21.6. Профиль канавок передачи винт-гайка качения
Успешно применяют также профиль «стрельчатая арка» (рис. 6, б), который сложнее в изготовлении, но позволяет создать предварительный натяг подбором диаметров шариков.
В станкостроении ШВМ изготавливают централизованно по ОСТ 1-1-72-6-81 под нагрузку от 9 до 90 кН (0,9…9,0 т).
Прямолинейный профиль резьбы (треугольный, трапециевидный) является наиболее технологичным, но значительно уступает по нагрузочной способности криволинейному (так допускаемая нагрузка на шарик, находящийся в желобе с профилем в виде дуги окружности, более чем в три раза выше допускаемой нагрузки на шарик, лежащий на плоской поверхности треугольного или трапецеидального профиля). Поэтому прямолинейный профиль резьбы применяют в ШВМ для восприятия небольших осевых нагрузок в приборах.
Твердость контактируемых поверхностей резьбы винта и гайки определяет нагрузочную способность и долговечность ШВМ. Рабочие поверхности закаливают до твердости 60 НRC и выше. Винты изготавливают из сталей: ХВГ и 7ХГ2ВМ с объемной закалкой, 8ХФ с закалкой ТВЧ и 20Х3МВФ с азотированием.
41
Для гаек применяют стали 9ХС, ШХ15 с объемной закалкой и цементируемые стали 18ХГТ, 12ХН3А и др.
Твердость поверхности шариков должна быть не ниже 63НRC (при допускаемых контактных напряжениях 2500 …
3000 МПа).
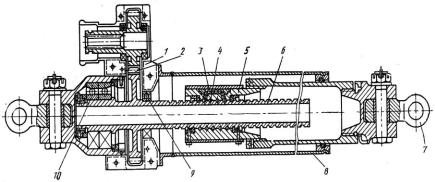
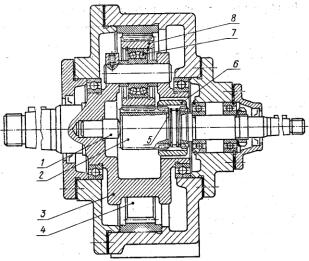
На рис. 22.7 показан шарико-винтовой механизм, применяемый в узле изменения стреловидности крыла сверхзвукового самолета. Движение к вращающемуся винту 6 передается от конического редуктора через зубчатую цилиндрическую передачу 2, понижающую частоту вращения винта. С помощью винтовой резьбы и шариков 4 вращение винта преобразуется в поступательное перемещение гайки 5. Непрерывность циркуляции шариков обеспечивается перепускным каналом 3, выполненным в гайке. Узлом крепления 7 гайка связана с крылом самолета. Винт в корпусе ШВМ 1 фиксируется радиальными 9 и радиально-упорными 10 шарикоподшипниками. Для предохранения пары винт-гайка от загрязнения в конструкции ШВМ предусмотрен защитный кожух 8.
Рис. 21.7. Шарико-винтовой механизм привода изменения стреловидности крыла самолета
42
22. ПЛАНЕТАРНЫЕ ПЕРЕДАЧИ
Учебные вопросы
1.Планетарные передачи. Общие сведения
2.Достоинства планетарных передач
3.Недостатки планетарных передач
4.Кинематика передачи
5.Силы, действующие в зацеплении планетарной передачи
6.Подбор чисел зубьев планетарной передачи
7.Особенности установки солнечного колеса передачи
8.Особенности расчета планетарных передач на прочность
22.1. Планетарные передачи. Общие сведения
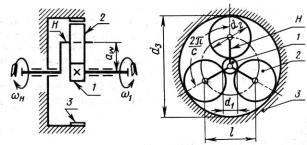
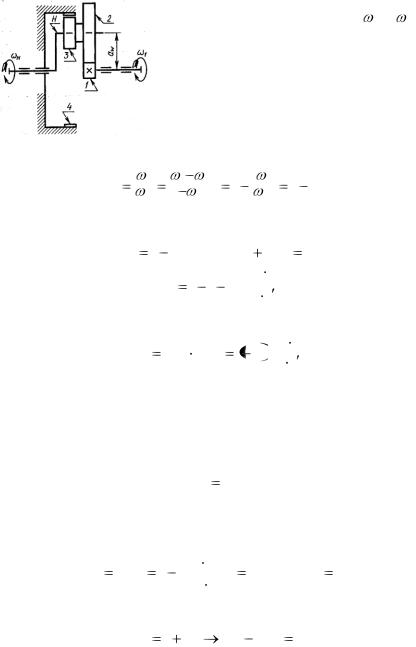
Планетарными называют передачи, имеющие зубчатые колеса с перемещающимися осями. Планетарная передача (рис. 22.1) включает центральное (солнечное) колесо 1, входящее в зацепление с сателлитами 2, оси некоторых образуют водило Н, а сами они взаимодействуют с внутренними зубьями центрального (корончатого) колеса 3. Сателлиты обкатываются по центральным колесам 1 и 3 и вращаются вокруг своих осей, т.е. совершают движение, подобное движению планет. Водило Н вместе с сателлитами, вращается вокруг центральной оси.
Рис. 22.1. Схема однорядной планетарной передачи
Если в планетарной передаче освободить звено 3, то получаем дифференциальный (с двумя степенями свободы) механизм. С его помощью можно сложить два движения в одно или разложить одно движение на два.
43
22.2.Достоинства планетарных передач
1.Широкие кинематические возможности передачи:
-редуктор с передаточными числами в диапазоне 3…9 (η
≈0,99…0,97); 7…16 (η ≈ 0,99…0,96); двухступенчатые 30…100 (η ≈ 0,8…0,65);
-как дифференциальный механизм.
2.Малые габариты и масса (передача вписывается в габариты корончатого колеса). Мощность передается несколькими потоками (3 сателлита), при этом нагрузка на зубья уменьшается. Кроме того, внутреннее зацепление обладает повышенной нагрузочной способностью (у него больший радиус кривизны).
3.Удобство компоновки благодаря соосности ведущего и ведомого валов.
4.При симметричном расположении сателлитов силы в передаче уравновешиваются, обеспечивая малые нагрузки на валы.
22.3.Недостатки планетарных передач
1.Повышенные требования к точности изготовления и монтажа передачи.
2.Существенное снижение КПД с ростом передаточного
числа.
Планетарные передачи с успехом применяют в транспортном машиностроении (тягачи), станкостроении, робототехника, приборостроении.
22.4. Кинематика передачи
Для определения передаточного числа планетарного механизма широко используют метод остановки водила Н (метод Виллиса). Для него всем звеньям планетарной передачи мысленно сообщают вращение с угловой скоростью водила Н, но в обратном направлении. При этом водило как бы затормаживается, а все другие звенья – освобождаются. Получается обращенный механизм, представляющий собой простую передачу с неподвижными осями.
44
|
|
1. |
Солнечное колесо |
ω1 |
|
1 – Н |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
Сателлит |
|
|
ω2 |
|
ω2 – ωН |
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
3.Корончатое колесо |
ω5 |
|
0 – ωН = – ωН |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
Водило |
|
|
ωн |
|
ωН – ωН = 0 |
|||
|
|
|
|
|
|
|
|
|
|
||
Для обращенного механизма: |
|
|
|
|
|
||||||
U H |
1 |
|
|
|
1 H |
1 |
1 |
1 U 3 |
, |
||
|
|
|
|
|
|
||||||
13 |
3 |
|
|
|
H |
H |
1H |
|
|
||
|
|
|
|
|
|
|
|||||
индекс вверху обозначает остановленное звено, откуда:
U13H |
1 U13H ; |
U13H |
U13H 1,0 , |
||||
|
|
|
|
z2 z |
|||
тогда |
U 3 |
1 ( |
1)n |
3 |
. |
|
|
|
|
||||||
|
1H |
|
|
z1 z2 |
|||
|
|
|
|
||||
Для механизма с неподвижными осями: |
|||||||
U H |
U H |
U H/ |
|
1 n |
z2 z3 |
, |
|
3 |
|
||||||
13 |
12 |
2 |
|
z1 z2 |
|||
|
|
|
|
|
|||
где n – число внешних зацеплений, n = 2.
Если будет одно внешнее зацепление, то знак (–) перед дробью.
Если ведущим является водило, то:
|
|
|
|
|
|
|
U 3 |
|
1 |
|
. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
H1 |
U |
3 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
1H |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этом случае передаточное число может быть очень |
|||||||||||||||||||||
большим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U13H |
|
1 |
|
|
1 |
|
99 101 |
|
|
|
1 |
; |
UH3 |
1 104. |
|||||||
UH |
|
|
100 100 |
|
4 |
||||||||||||||||
|
1 |
|
|
|
10 |
|
|
|
|
|
|||||||||||
Однако при этом КПД = 0,01. |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
U 3 |
1 |
|
|
z3 |
|
(U 1)z z |
|
. |
|
||||||||||
|
|
|
|
|
|
3 |
|
||||||||||||||
|
|
1H |
|
|
|
z1 |
|
|
|
|
1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
45 |
|
|
|
|
|
|
|
|
|
|
|

22.5. Силы, действующие в зацеплении планетарной передачи
Из условия равновесия сателлита следует:
F32 = F12; FH2 = -2F12,
где F12 = 2 M1 · Kc /(d1 · C),
с – число сателлитов; Кс – коэффициент, учитывающий неравномерность рас-
пределения нагрузки между сателлитами (зависит от точности изготовления и числа сателлитов);
d1 – диаметр начальной окружности солнечного колеса.
Рис. 22.2. Схема одноступенчатой планетарной передачи
Рис. 22.3. Схема сил, действующих в планетарной передаче
Крутящие моменты на остальных элементах планетарной передачи можно определить как произведение сил на этих звеньях на соответствующие радиусы.
46

22.6. Подбор чисел зубьев планетарной передачи
Числом зубьев солнечной шестерки 1 обычно задаются из условия неподрезания ножки зуба, принимая z1 ≥ 17.
Число зубьев неподвижного корончатого колеса равно: z3 = z1(U – 1).
Число зубьев сателлитов 2 рассчитывают из условия соосности, по которому межосевые расстояния аw зубчатых пар с внешним и внутренним зацеплением должны быть равны (рис. ):
аw = 0,5 (d1 + d2) = 0,5 (d3 – d2).
Поскольку модули планетарной передачи одинаковые, то: z2 = 0,5 (z3 – z1).
Полученные числа z1; z2; z3 проверяют по условиям сборки и соседства.
Условие сборки требует, чтобы во всех зацеплениях центральных колес с сателлитами имело место совпадение зубьев с впадинами, в противном случае собрать передачу невозможно.
При симметричном расположении сателлитов необходимо: z1Cz3 целое число ,
где с – число сателлитов (обычно с = 3).
Условие соседства требует, чтобы сателлиты при вращении не задевали друг друга! Это возможно, если:
z2 + 2 < (z1 + z2) sin π/c.
22.7. Особенности установки солнечного колеса передачи
Из-за неизбежной неточности изготовления нагрузка между сателлитами распределяется неравномерно. Для выравнивания нагрузки по потокам в передачах с тремя сателлитами центральное солнечное колесо делают самоустанавливающимся в радиальном направлении (без радиальных опор).
47
В конструкции, изображенной на рис. 23.4, плавающей является центральная шестерня 2, которая самоустанавливается по сателлитам 8 в радиальном направлении, фиксируется штырем 1 и зубчатой муфтой 6 с установленными на ней пружинными кольцами 5. Для самоустановки сателлитов 8 по неподвижному центральному колесу 4 применяют сферические подшипники качения 7.
Рис. 22.4. Планетарный редуктор 1 – фиксирующий штырь, 2 – солнечная шестерня, 3 – водило,
4 – центральное корончатое колесо, 5 – стопорные (пружинные) кольца, 6 – муфта зубчатая, 7 – сферический подшипник, 8 – сателлиты
22.8. Особенности расчета планетарных передач на прочность
Расчет на прочность зубьев планетарных передач ведут по обычным формулам для зубчатых передач. Поскольку модули и силы в одной ступени передачи (рис. 22.3) одинаковые, а внутреннее зацепление по своим свойствам прочнее внешне-
48