

m1059
.pdfСпособ вращения отрезка прямой вокруг проецирующей прямой П1
|
|
В2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Плоскости |
проекций |
П1 и |
П2 |
||
А2 |
|
i2 |
|
|
I |
остаются |
на месте, |
а |
прямая |
АВ |
|||
|
|
A 2 |
P2 |
|
|
|
|
|
|||||
П2 |
|
|
|
|
|
|
|
вращается |
вокруг оси до удобного |
||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|||||||||
Х П1 |
|
|
|
|
|
|
|
||||||
|
А |
|
|
|
|
положения ( |
АВ || П2 ). |
|
|
|
|||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При этом точка А вращается вокруг |
|||||
|
|
|
|
|
|
|
|
оси по |
|
окружности, |
плоскость |
||
|
|
|
|
|
|
|
AI1 |
которой |
|
перпендикулярна |
оси |
||
|
|
В1 |
≡ i1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
вращения, |
|
точка |
В |
остается |
|
|
|
|
|
|
|
|
|
неподвижной. |
|
|
|
||
41

Способ вращения отрезка прямой вокруг проецирующей оси П1
|
В2 |
|
i П1 |
|
i2 |
AI2 |
АВ = А2В2 |
|
А |
P2 |
|
2 |
|
||
|
|
||
Х |
П2 |
|
|
|
|
- угол наклона отрезка |
|
П1 |
|
||
|
|
||
|
А1 |
|
прямой АВ к П1 |
|
|
|
|

 AI1 В1 ≡ i1
AI1 В1 ≡ i1
42
|
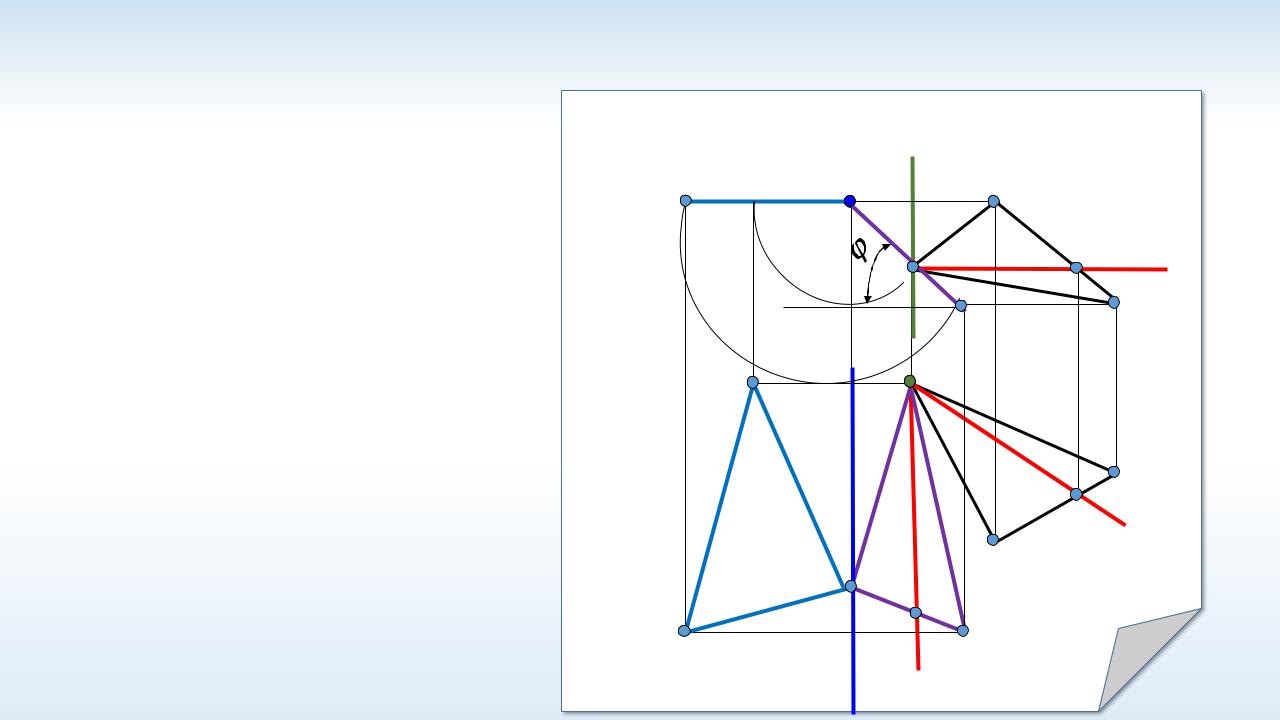
Способ вращения АВС вокруг проецирующих осей |
|
|
||||||||||||||
Определить |
|
|
натуральную |
II |
|
|
q |
ΞВ12 |
|
j2 |
|
|
|
|
|
||
величину |
АВС |
вращением |
C |
2 |
|
2 |
|
|
|
B |
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
вокруг проецирующих прямых. |
|
|
AII2 |
|
|
|
|
|
1 |
2 |
h |
||||||
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1. |
Плоскость |
общего |
положения |
|
|
|
|
|
|
C2 |
1 |
|
|
C2 |
|||
преобразовать в проецирующую. |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
AII |
|
|
|
|
|
|
|
|
|
||||||
|
Для этого |
|
линию |
уровня |
h |
|
1 |
A |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|||||||
|
|
|
|
|
j1 Ξ |
|
|
|
|
|
|
||||||
преобразуем в проецирующую прямую. |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Н.В. |
|
|
|
|
|
11 |
|
C1 |
2. |
Плоскость |
проецирующую |
|
|
|
|
|
|
|
|
h1 |
||||||
|
|
|
|
|
|
B1 |
|
|
|
||||||||
преобразуем в плоскость уровня. |
|
|
|
B11 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
CII1 |
|
|
|
|
1I |
C11 |
|
|
|||
|
|
|
|
|
|
|
|
|
q1 |
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
hI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
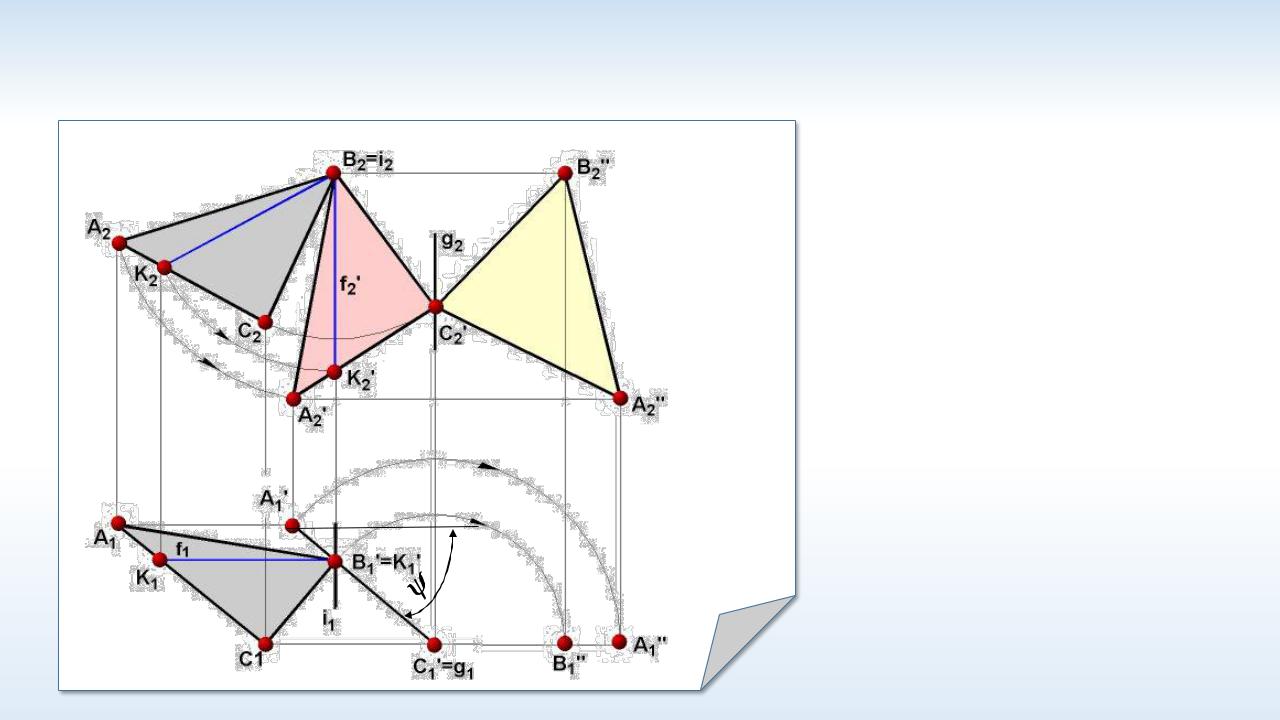
Способ вращения АВС вокруг проецирующих осей
|
Определение |
угла |
||
Н.В. |
наклона |
АВС к П2 и |
||
натуральной |
величины |
|||
|
||||
|
треугольника |
вращением |
||
|
вокруг проецирующих осей |
|||
|
i и q. |
|
|
|
44

СПОСОБ ВРАЩЕНИЯ ВОКРУГ ЛИНИЙ УРОВНЯ
45

Результативным приёмом, значительно упрощающим решение многих задач, связанных с определением метрических характеристик плоских фигур, является способ вращения геометрического объекта вокруг линий уровня.
Путём такого преобразования можно любую плоскость, которой принадлежит рассматриваемый объект, повернуть в новое положение, параллельное плоскости проекции, куда он спроецируется в натуральную величину.
На этом способе основано построение разверток цилиндрических и призматических поверхностей способом раскатки.
46
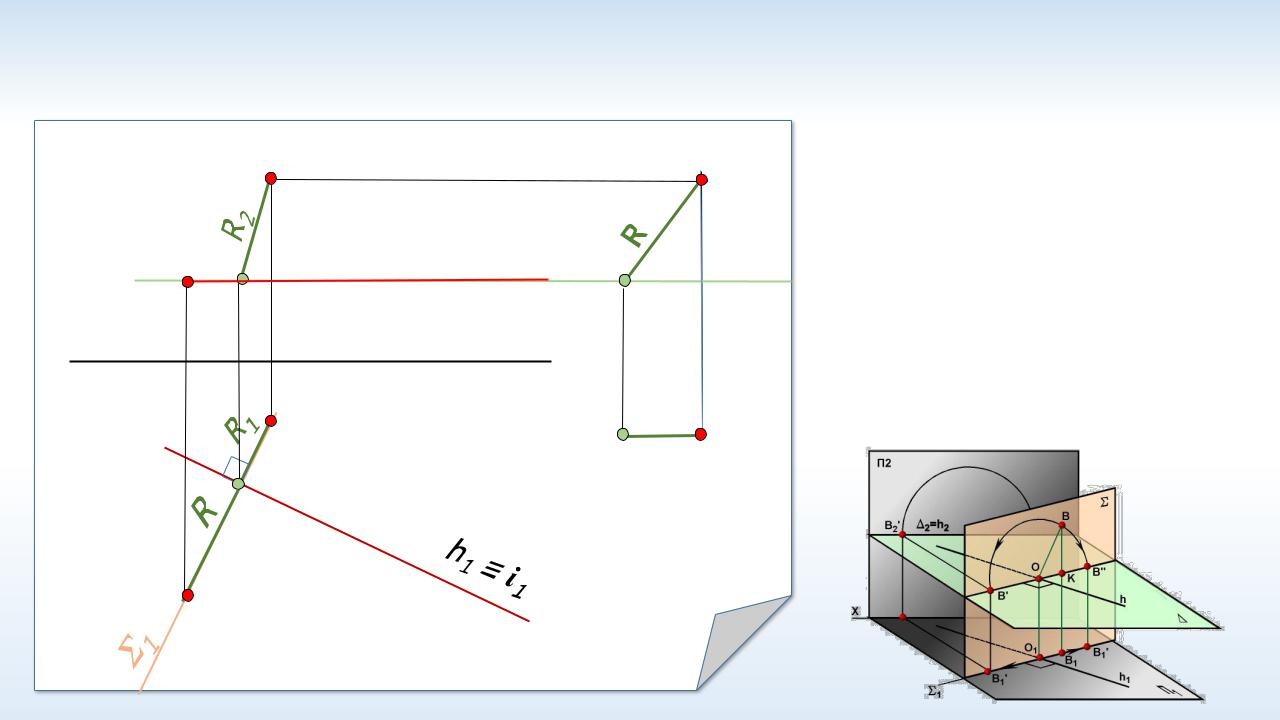
Вращение точки А вокруг линии уровня до совмещения с горизонтальной плоскостью
|
В2 |
|
|
|
’ |
|
Точка |
В |
движется |
по |
|
|
|
|
|
В 2 |
|
||||
|
|
|
|
|
|
|
окружности, |
|
плоскость которой |
|
AII2 |
h |
2 |
≡ i |
2 |
|
1 |
перпендикулярна оси вращения h. |
|||
|
|
|
|
Н.В. радиуса вращения точки В |
||||||
|
|
|
|
O’2 |
|
|
||||
П2 |
О2 |
|
|
|
|
определим |
плоскопараллельным |
|||
|
|
|
|
|
|
перемещением. |
|
|||
Х П |
|
|
|
|
|
|
|
|||
В1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O’1 |
В’1 |
|
|
|
|
|
|
O1 |
|
|
|
|
|
|
|
|
|
|
ВII1 |
|
|
|
|
|
|
|
|
|
47
|
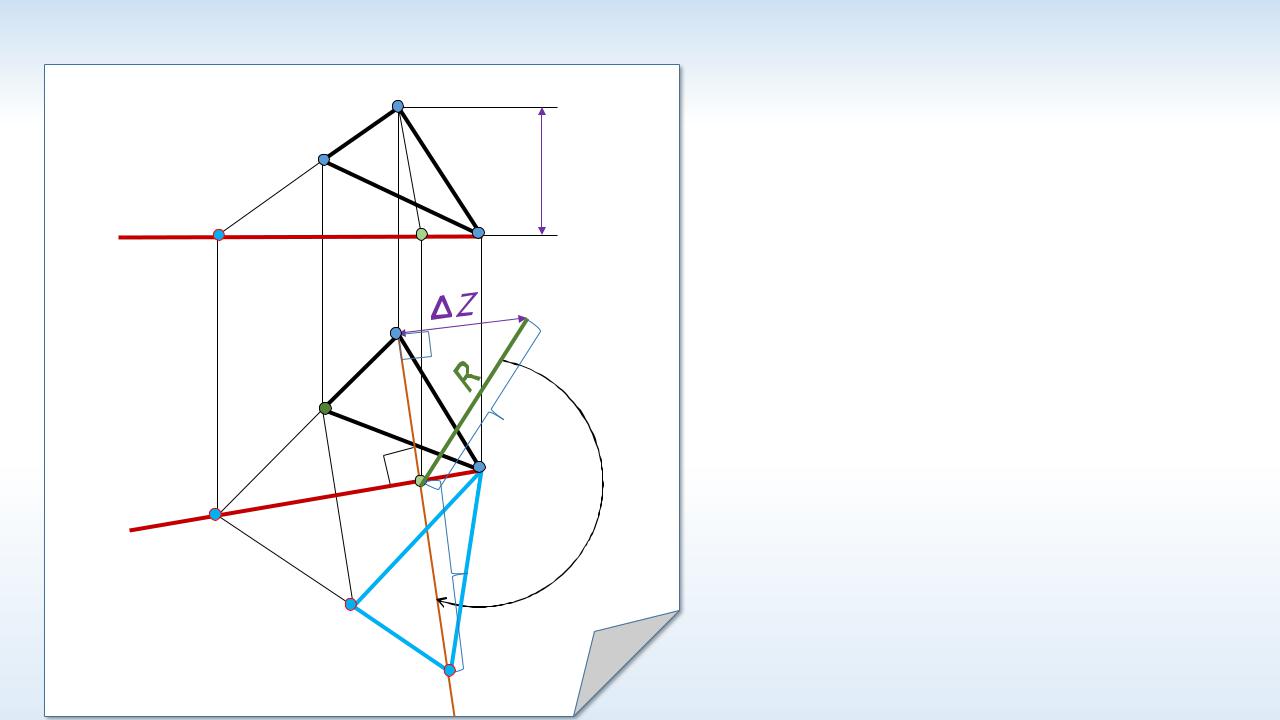
Вращение АВС вокруг линии уровня |
||||
|
|
В2 |
|
|
|
|
|
|
Z |
1. Построим горизонталь плоскости h. |
|
|
|
А2 |
|
||
|
|
|
|
|
|
h2 |
12 |
|
С2 |
2. Определим О - центр вращения точки В. |
|
|
|
||||
|
|
O2 |
|
|
3. Повернём АВС вокруг h до положения |
|
|
В1 |
|
В0 |
параллельного плоскости проекций П1 . |
|
|
|
|
||
|
|
|
|
|
|
|
|
А1 |
|
|
4. Точка В движется по окружности, |
|
|
|
С1 |
плоскость которой перпендикулярна |
|
h1 |
11 |
|
|
||
O1 |
|
|
оси вращения h. |
||
|
|
|
|||
|
|
Н.В. |
|
|
5. О1В0 = Rв |
|
|
А11 |
B1 |
|
|
|
|
1 |
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|

СПОСОБ ВСПОМОГАТЕЛЬНОГО ПРОЕЦИРОВАНИЯ
Замена плоскостей |
Плоскопараллельное |
Вращение |
Дополнительное |
Оглавление |
|
проекций |
перемещения |
проецирование |
|||
|
|
49
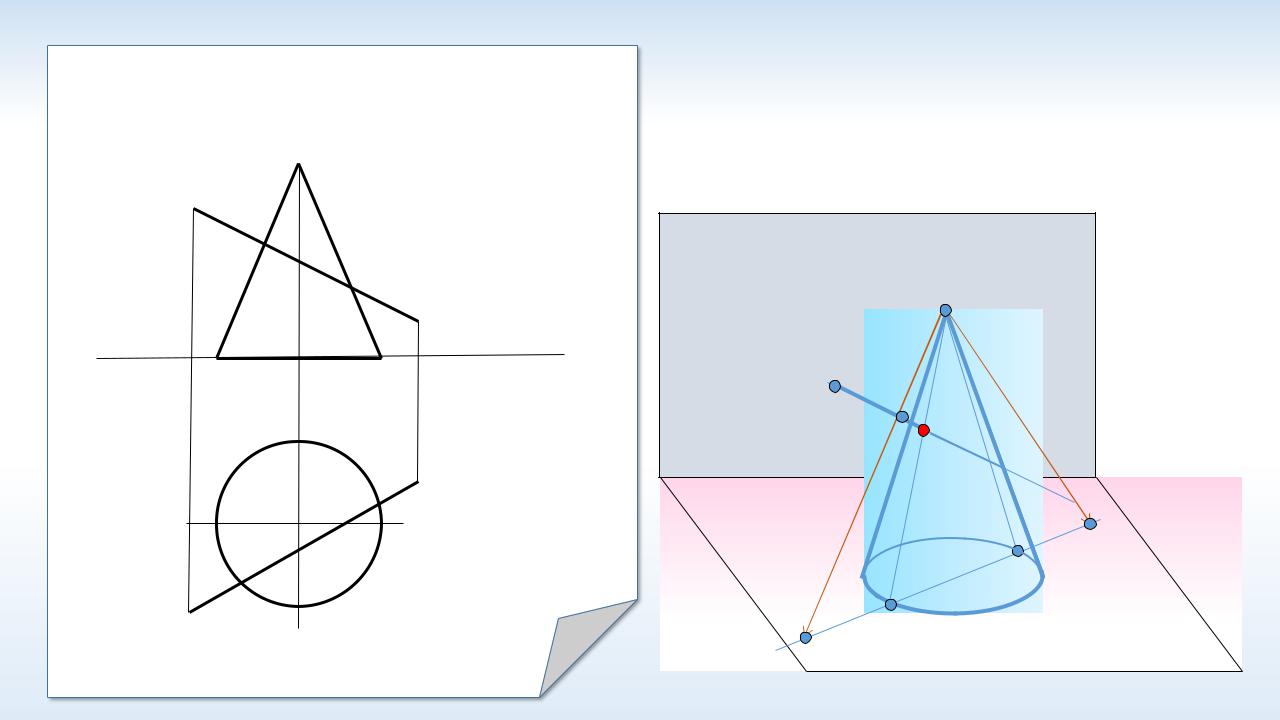
S2
A2
B2
П2 Х П1
B1
S1
A1
Задача: Определить точки пересечения прямой AВ с поверхностью конуса. Показать видимость отрезка прямой.
П2
S
A
1
K N
 B
B
В11
N11
1 |
1 |
1 |
K1 |
П |
1 |
|
|
|
|||
|
|
|
1 |
|
|