

m1059
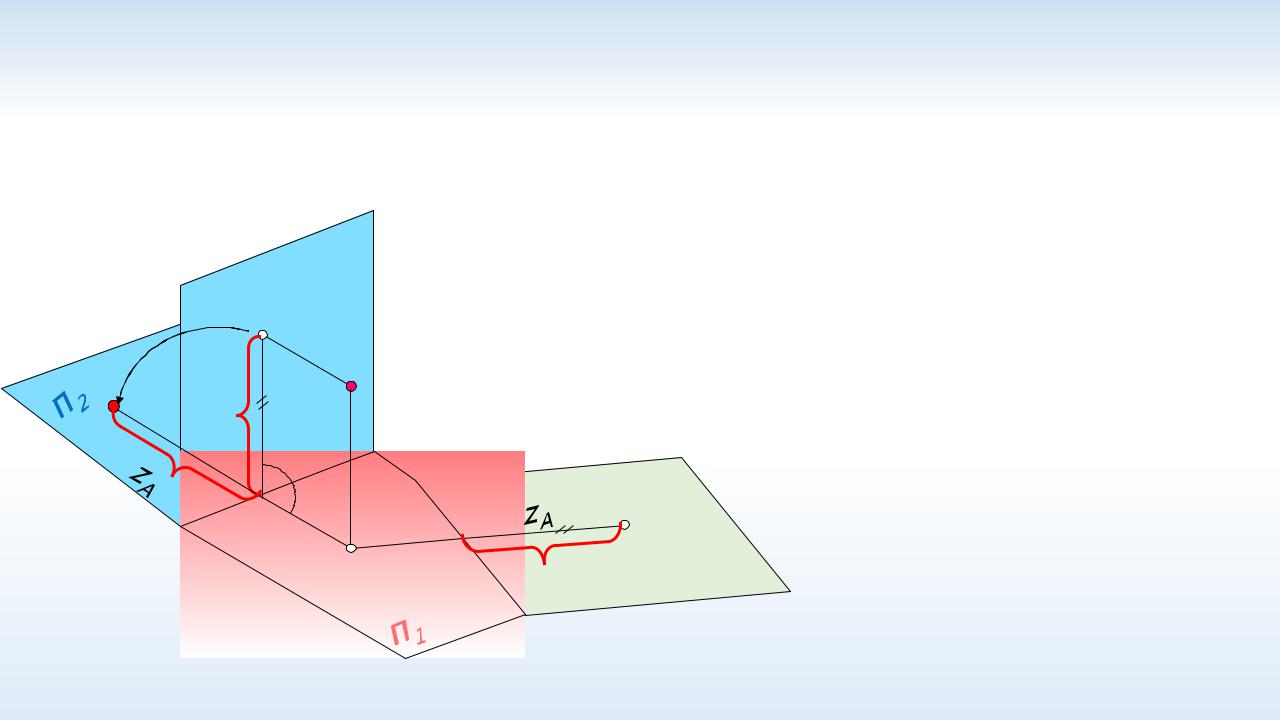
.pdfСпособ замены плоскостей проекций. Точка
Для получения проекций точки А в новой
П А2 |
|
|
|
системе плоскостей П1 П4, плоскость П4 |
|||
|
|
|
повернем вокруг оси X14 до совмещения с |
||||
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
A |
А4 П |
|
|
плоскостью П1. |
|
|
|
4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
A |
|
|
Новая фронтальная проекция |
A4 |
||
|
z |
|
|
||||
Х12 |
|
А4 |
|
расположена |
на |
общем |
|
|
|
перпендикуляре |
(линии |
связи) |
к |
||
А |
|
|
П4 |
||||
|
|
|
|
|
|
||
1 |
|
|
|
новой оси X14, проведенного от |
|||
|
|
|
|
||||
|
X14 |
|
|
оставшейся |
без |
изменения |
|
горизонтальной проекции A1.
11
Способ замены плоскостей проекций. Точка
Плоскость П2 также повернем вокруг
П2 |
оси X12 до совмещения с плоскостью П1.. |
А2 |
Все плоскости |
П1, |
П2, П4 |
теперь |
|
||||
|
A |
|
|
|
|
расположены в одном уровне. |
|
||
z
X12 |
|
А4 |
|
А1 |
П4 |
||
|
|||
|
|
X14 |
12
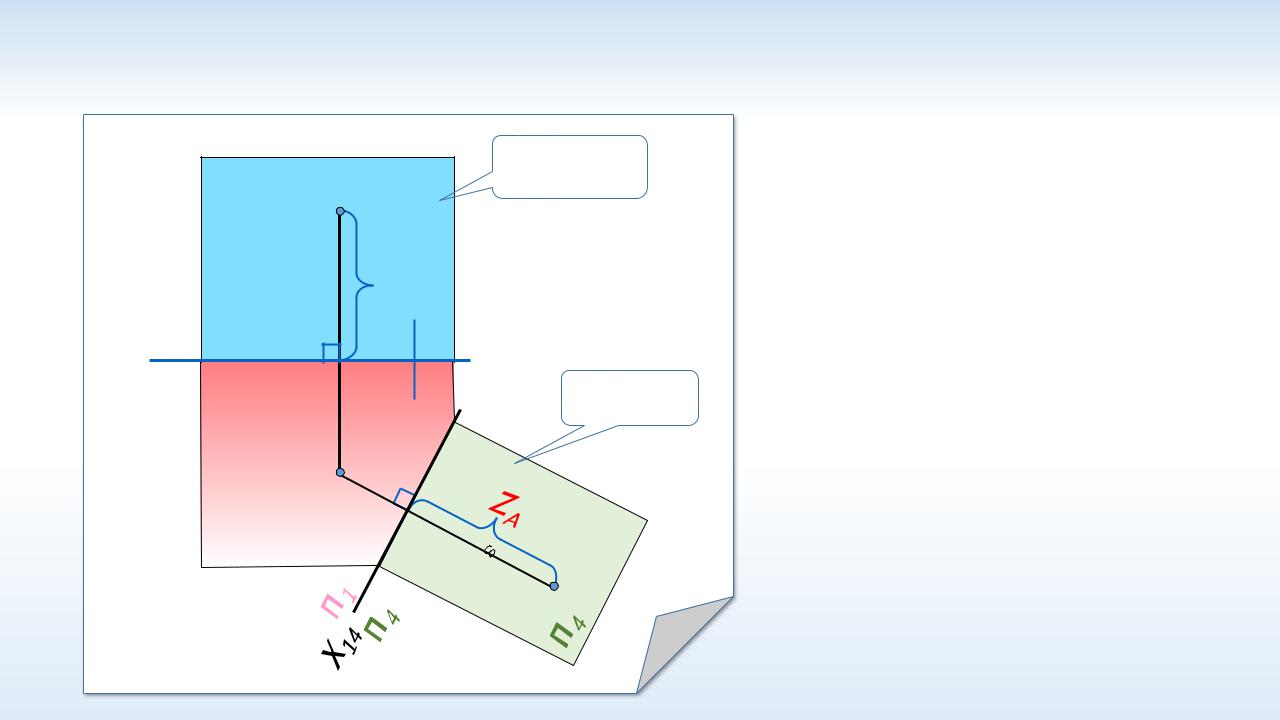
Способ замены плоскостей проекций. Точка
|
|
|
|
Заменяемая |
|
|
|
A2 |
|
|
плоскость |
Определение |
координаты |
|
|
|
|
|||
|
|
ZA |
|
|
точки A на новой |
плоскости |
|
s |
|
|
проекций П4. |
|
|
X12 |
П2 |
|
0 |
|
|
|
|
|
|
|
|||
П1 |
|
|
Новая |
|
|
|
|
|
|
|
|
||
|
|
|
плоскость |
|
|
|
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
A4 |
|
|
13
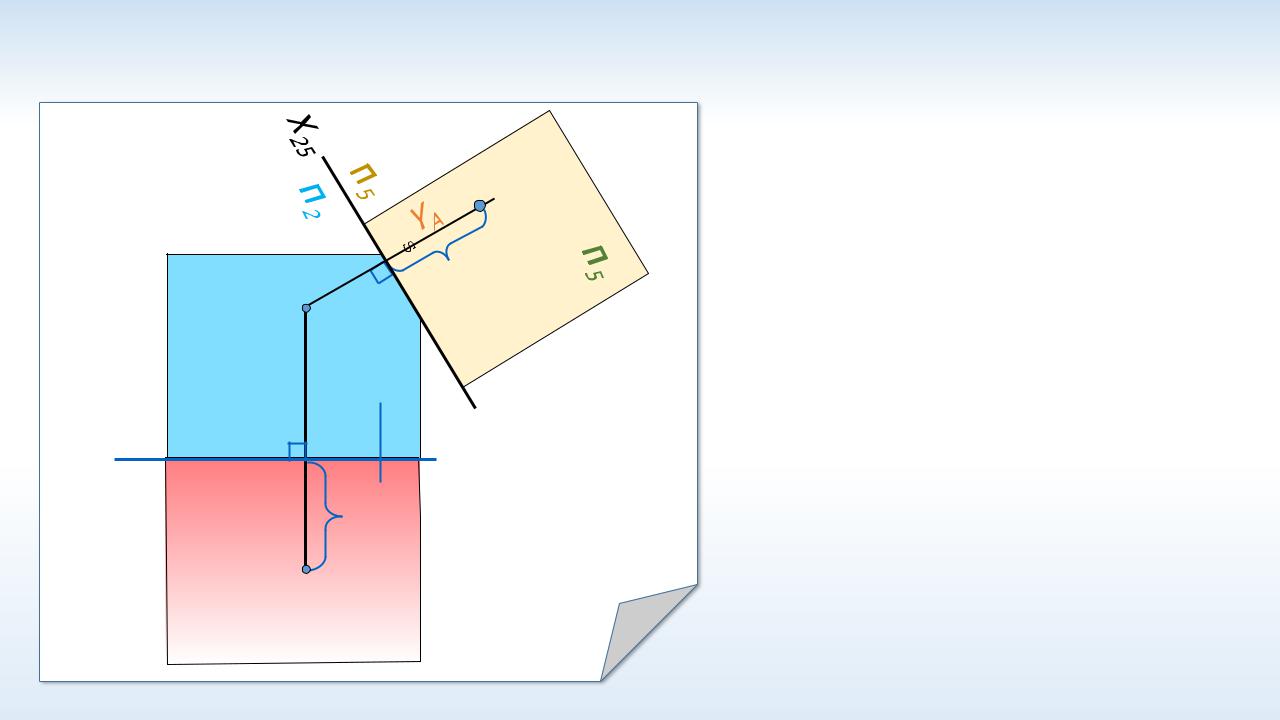
Замена плоскостей проекций. Точка
|
|
|
A5 |
|
|
A2 |
|
X12 |
П2 |
|
0 |
П1 |
A |
||
|
|
Y |
s |
|
|
|
|
|
|
A1 |
|
•Заменяем плоскость П1 на плоскость П 5.
•П2 П5.
14

Способ перемены плоскостей проекций. Прямая
|
|
|
|
|
|
|
|
|
Дана прямая AВ в системе |
плоскостей |
||||||||
|
|
|
|
|
|
|
|
|
проекций П1 П2. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Заменим фронтальную плоскость проекций П2 |
|||||||||
|
|
|
|
|
|
|
|
|
на новую - П4 , которой прямая АВ параллельна. |
|||||||||
|
|
В2 |
|
|
В4 |
|
П4 |
|
|
|
|
|
|
|
|
|
||
|
|
|
В |
|
|
|
н.в. |
|
|
П2 П4 |
|
|
П4 || AB |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
А2 |
|
|
|
|
|
А4 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
А |
|
П4 П1 |
|
|
|
П4 ∩П1= X14 |
|
||||||
|
zА |
|
|
|
|
zА |
|
|
|
|
||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
В1 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
ZА(П4)=ZА ( П2) |
|
ZВ(П4)=ZВ ( П2) |
||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
А1 |
|
X14 |
|
|
|
|
|
|
|
|
|
||
12 |
|
|
|
|
|
|
|
|
Расстояние точек |
от |
плоскости П1 |
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
П1 |
(координата Z) остается неизменным. |
||||||||
15

Определение натуральной величины отрезка АВ и его
угла наклона к плоскости проекций П1
|
|
|
|
|
B2 |
|
П2 |
|
А2 |
|
zВ |
X12 |
|
|
|
|
|
П1 |
|
|
|
|
|
|
|
|
|
B1 |
|
|
|
|
|
|
|
|
|
|
А1 |
|
|
|
|
П1 |
|
|
zВ |
|
|
|
|
||
|
X14 |
П4 |
А4 |
|
В |
|
|
|
|
H.B. |
4 |
|
|
|
|
|
П4 || AB
В новой плоскости проекций П4 ось
X14 || А1 В1 .
При преобразовании для всех точек сохраняются координаты Z.
На П4 определяются натуральная величина отрезка и его угол наклона
к плоскости проекций П1 .
16
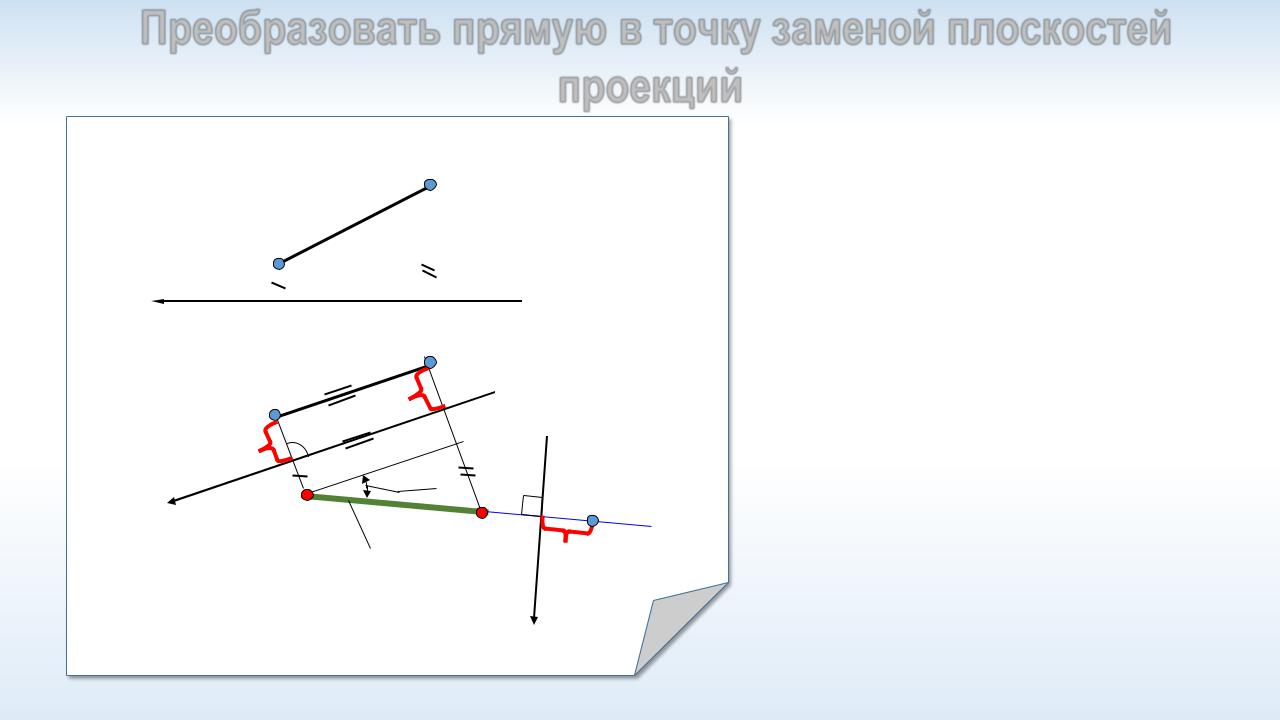
Преобразовать прямую в точку заменой плоскостей
|
|
|
|
|
|
|
|
|
проекций |
Преобразовать |
|
чертеж |
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
B2 |
|
отрезка AB так, чтобы прямая |
||||||
|
|
А2 |
|
|
|
|
|
|
|
общего положения |
оказалась |
|||||
X12 |
П2 |
|
|
|
|
|
|
|
перпендикулярной |
одной |
|
из |
||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
B1 |
|
плоскостей |
проекций |
|
новой |
|||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
А1 |
|
|
|
|
|
|
|
системы, |
т. |
е. |
|
стала |
||
|
|
|
|
|
|
|
|
|
|
|||||||
П1 |
|
|
|
|
|
А5≡В5 |
проецирующей прямой. |
|
|
|
|
|||||
X14 |
П4 |
|
|
А |
|
|
|
|
В новой системе плоскостей |
|||||||
|
|
4 |
н.в |
. |
|
|
||||||||||
|
|
|
|
|
В4 |
|
проекций П |
П , ось х |
|
А В . |
||||||
|
|
|
|
|
|
|
45 |
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
4 |
5 |
|
|
4 |
4 |
|
П4 П5
X45
17
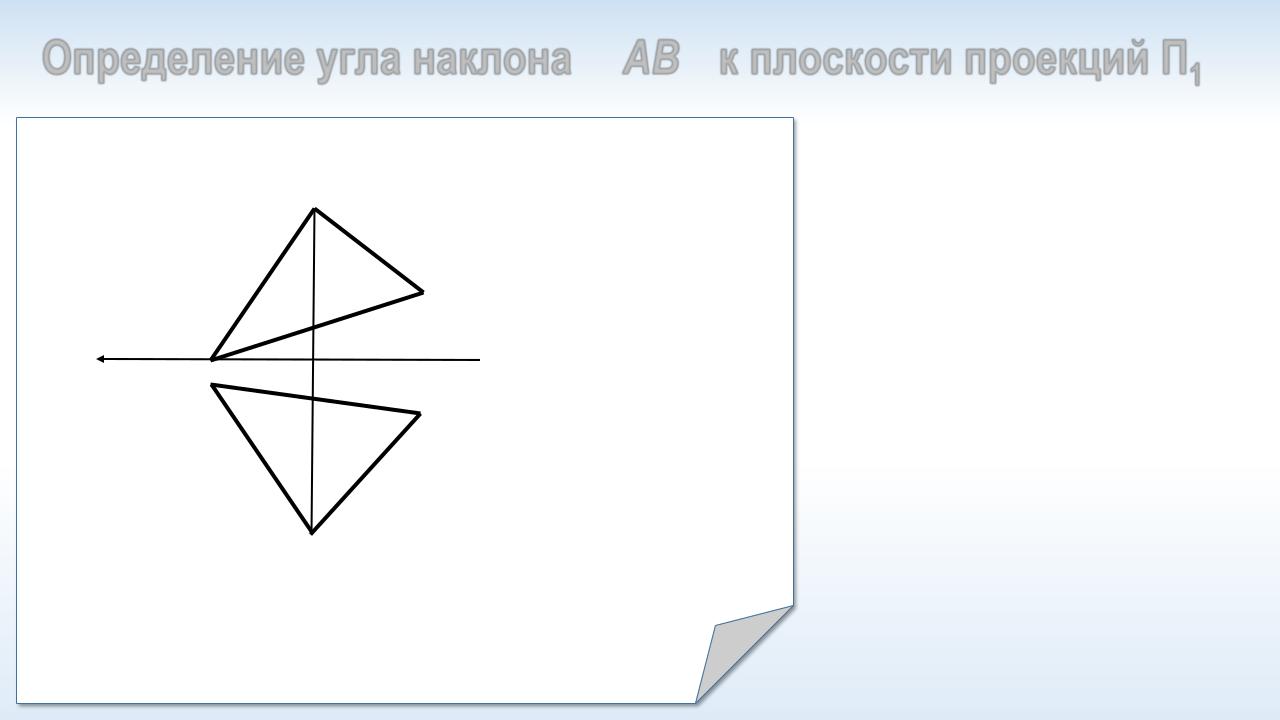
Определение угла наклона
В2
П2 А2 |
|
С2 |
||
|
||||
|
|
|||
X12 П1 |
|
|
|
|
|
|
|
|
|
А1 |
|
С |
||
|
|
|||
|
|
|
1 |
|
В1
АВС к плоскости проекций П1
Дано: АВС общего положения
Провести и обозначить ось X и плоскости проекций.
18
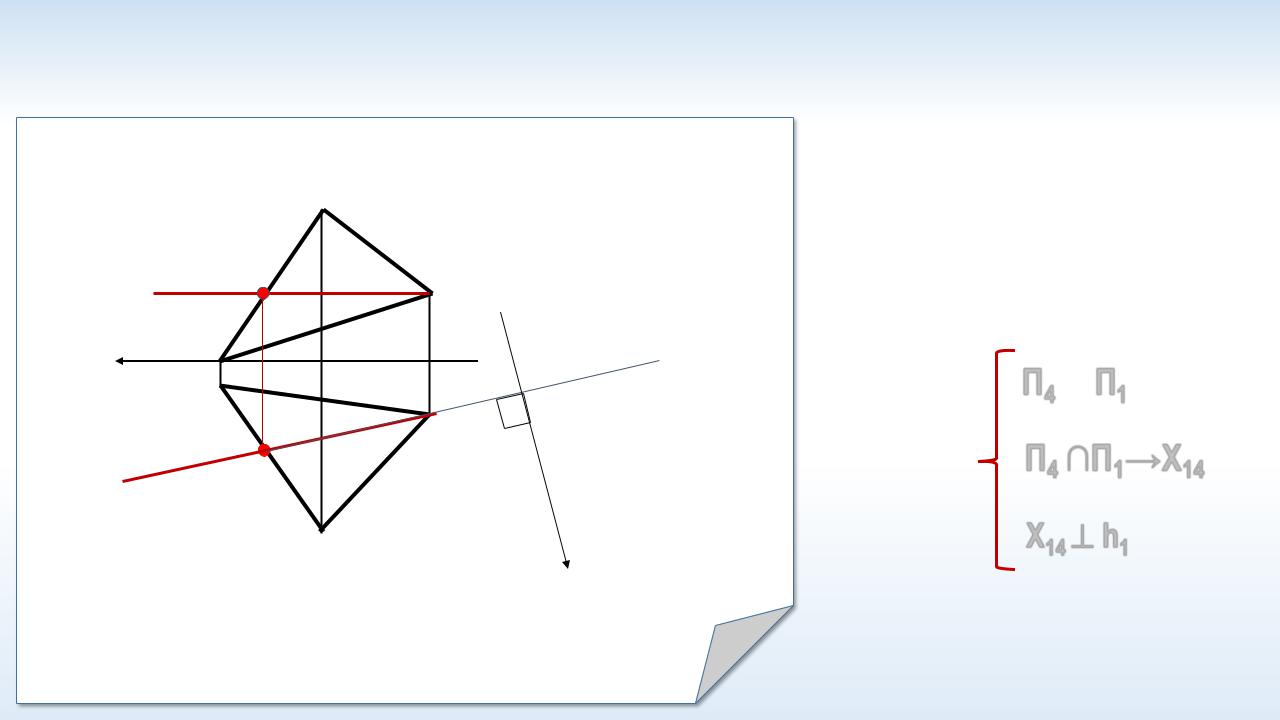
Определить угол наклона АВС к П1
|
|
|
|
|
|
|
|
Построить горизонталь |
||
|
|
|
|
|
В2 |
|
|
h ABC |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
h |
12 |
С2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Выбрать новую плоскость |
|||
|
|
|
|
|
|
|
||||
|
П2 |
А |
|
|
|
|
|
|
|
|
X1 |
|
|
2 |
|
|
|
|
|
П |
|
П |
|
А |
|
|
|
|
П |
1 |
||
2 |
|
1 |
|
|
|
|
4 |
|
||
|
|
|
1 |
|
|
|
|
|
|
|
|
h1 |
|
11 |
С1 |
|
|
П4 ∩П1→X14 |
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
П4 |
X14 h1 |
||
|
|
|
|
|
В1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х14 |
|
|
|
19
|
|
|
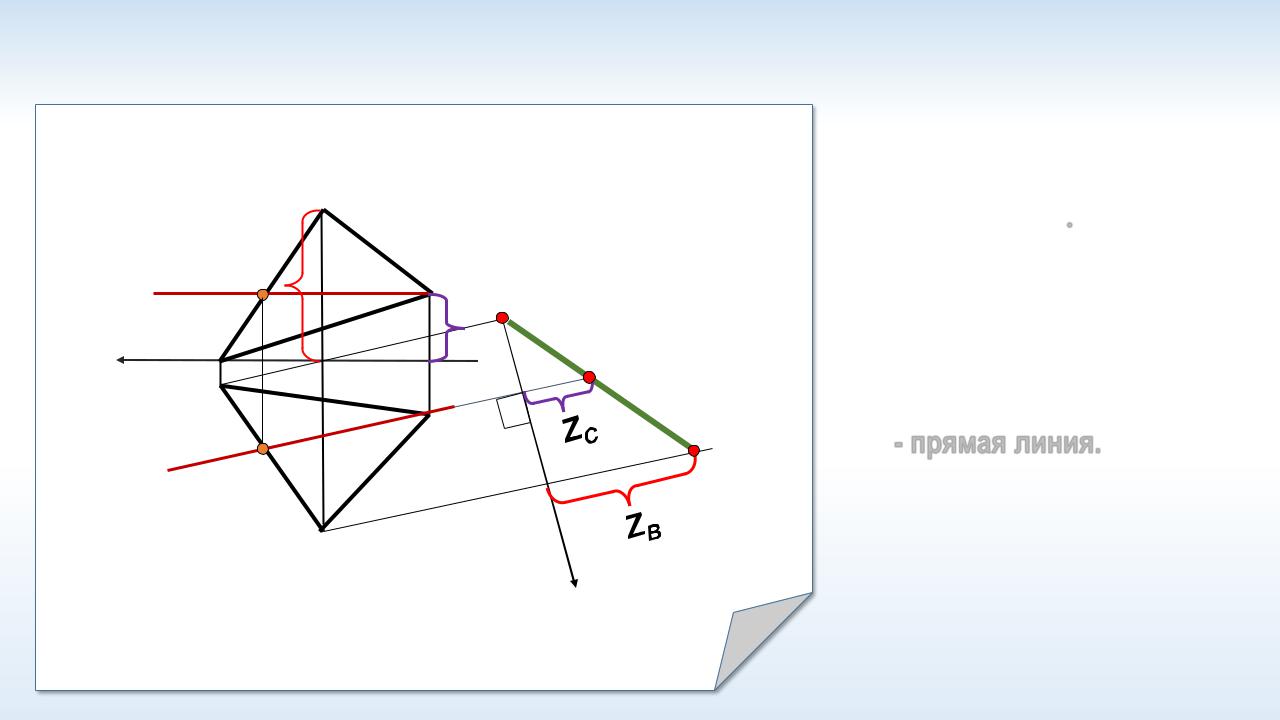
Определить угол наклона |
АВС к П1 |
|
|||
|
|
|
|
|
|
|
Строим проекцию |
АВС на |
|
|
|
В2 |
|
|
|
плоскости П4 . |
|
|
|
|
|
|
|
|
|
|
|
|
h2 |
12 |
С2 |
|
|
|
|
|
П2 |
А2 |
|
A4 |
|
|
|
|
X1 |
|
|
|
|
|
|||
П1 |
|
|
|
|
C4 |
Проекция АВС на плоскости |
||
2 |
|
|
|
|
||||
|
А1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
h1 |
|
С1 |
|
В4 |
П4 - прямая линия. |
|
|
|
|
11 |
|
|
|
|
|
|
|
|
В1 |
|
П1 |
П4 |
|
|
|
|
|
|
|
х |
|
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
20 |