

m1012
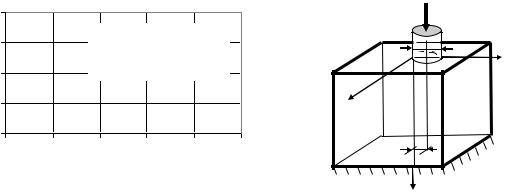
.pdfПоскольку исследуемый объект находился в иммерсионной ванне, то первоначально трение в контактной зоне не учитывалось – горизонтальные перемещения считались свободными.
Результаты расчета полей перемещений U и W методом конечных элементов для диаметрального сечения представлены на рис. 4.20.
U |
|
W |
Рис. 4.20. Поля перемещений U и W
в диаметральном сечении при решении МКЭ
Анализ результатов расчета показал, однако, что в некоторых характерных сечениях численное решение находится, даже качественно, в явном противоречии с экспериментальными результатами. Так, в сечениях z ~ 20 мм уже интерферограмма абсолютной разности хода (см. рис. 4.13, в), без сомнения, свидетельствовала, что первый инвариант за пределами выточки (r > 5 мм) растет. Однако в этой зоне решение МКЭ давало убывающее распределение I1(r) – рис. 4.21, а. Еще более значительной была разница численного и экспериментального решений для z(r) – результаты также представлены на рис. 4.21, б.
101

а)
б)
Рис. 4.21. Сравнение расчета МКЭ для I1(r) – а
иz(r) – б при различных граничных условиях
сэкспериментальными результатами
102
Как выяснилось при последующем анализе результатов, это противоречие связано с неточно заданными граничными условиями: горизонтальные перемещения верхней торцевой поверхности не являются свободными. Распределение перемещений на этой поверхности было получено по интерферограмме рис. 4.13, б, а затем были откорректированы граничные условия для решения МКЭ.
Поля перемещений U и W в диаметральном сечении по результатам последующего расчета представлены на рис. 4.20. Сравнение их с соответствующими полями перемещений U и W, представленных на интерферограммах рис. 4.13, б, позволяет отметить хорошее соответствие по всему полю за исключением двух зон в окрестности вершины выточки. Первая – вблизи оси симметрии: здесь заметно увеличение частоты полос на интерферограмме W по сравнению с решением МКЭ. Вторая – угловая зона; в непосредственной близости от нее частота интерференционных полос на интерферограмме U существенно снижается. Эти изменения как в первом, так и во втором случае связаны с влиянием рефракции в неоднородно деформируемом объеме.
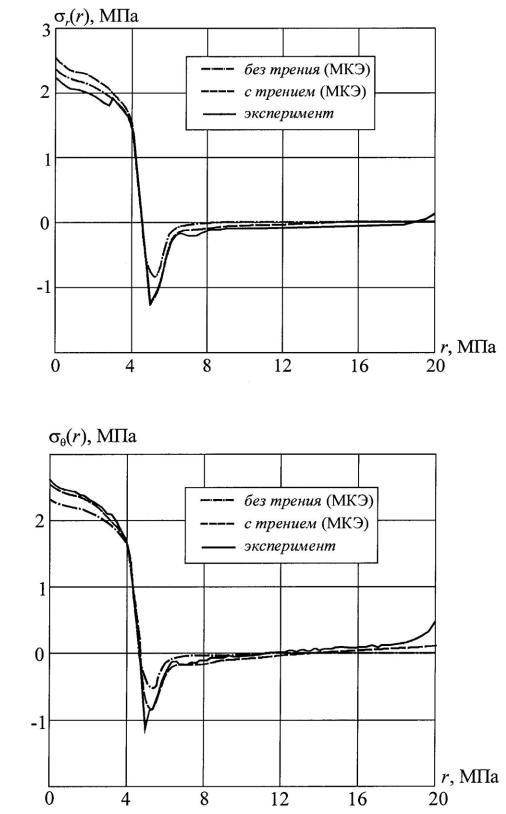
Эпюры нормальных напряжений z , r , и первого инва-
рианта тензора напряжений I1(r) для сечения z = 20 мм, полученные МКЭ, представлены на рис. 4.21 и 4.22. Здесь же представлено для сравнения решение МКЭ без учета трения и экспериментальные результаты, ранее обсуждавшиеся в п. 4.3.4.1.
Следует отметить наличие небольшой систематической погрешности уже на эпюре I1(r), полученной после расшифровки интерферограммы рис. 4.13, в и связанной с неточностью задания нагрузки и упругих постоянных. Кроме того, вблизи боковой поверхности цилиндра заметно резкое возрастание экспериментальных значений, связанное с неточностью определения порядка интерференционных полос у кромки модели. На оси симметрии разность расчетных и экспериментальных значений составляет менее 7 %.
Наименьшие погрешности при определении нормальных напряжений для r(r) – за пределами выточки решение МКЭ и экспериментальные значения практически совпадают; у вершины выточки их разность возрастает и достигает ~10 % на оси симметрии.
103
а)
б)
Рис. 4.22. Сравнение расчета МКЭ для r(r) – а
и(r) – б при различных граничных условиях
сэкспериментальными результатами
104
Погрешности определения z на удалении от выточки в основном повторяют характер погрешностей для I1(r) – присутствует небольшая систематическая погрешность за пределами выточки. Однако у концентратора разность численного и экспериментального решений достигает почти 18 %. Следует заметить, что в таких зонах МКЭ, ввиду осреднения по размерам элемента, обычно дает заниженные значения напряжений. Анализ результатов тестовых экспериментов показывает, что значения фиктивных деформаций, как правило, получают заниженными. Это связано с необходимостью сглаживания производных от разности хода при определении фиктивных деформаций (см. п. 3.3), что в конечном итоге приводит к потере высших спектральных составляющих функции – ее выглаживанию. В результате деформации исследуемого сечения, определяемые как разность между суммарными и фиктивными деформациями, оказываются завышенными, а как следствие, завышенными оказываются и напряжения. По-видимому, действительные значения находятся между этими крайними значениями.
Напряжения : за пределами выточки решение МКЭ и экспериментально полученное распределение практически совпадают; в зоне концентратора их разность составляет ~15 %; на оси симметрии – менее 10 %.
Расхождение численного и экспериментального решений для остальных сечений существенно меньше, чем для рассмотренного выше.
4.4. Реконструкция асимметричных распределений
4.4.1. Схемы регистрации интерферограмм при многоракурсном просвечивании
В отличие от осесимметричных распределений, в общем случае для реконструкции первого инварианта тензора напряжений I1(x, y) (деформаций I(x, y)) на основе преобразования Радона необходима информация, соответствующая различным направлениям просвечивания. Схемные решения, позволяющие зарегистрировать необходимую информацию, разнообразны. Часть из них универсальна и широко используется, но есть и уникальные, используемые в достаточно узкой области [223].
105
На рис. 4.23 приведены схемы, чаще всего используемые для регистрации проекционных данных.
1.Классическая (см. рис. 4.23, а) – соответствует стандартному голографическому интерферометру с наклонным опорным пучком; обеспечивает некоторый набор проекций при размножении рабочего плеча интерферометра. Схема громоздка, дорога и позволяет получать лишь фиксированное число проекций.
2.Схема с растром (см. рис. 4.23, б) также обеспечивает фиксированный набор проекций, однако существенное уменьшение числа оптических элементов и меньшие геометрические размеры делают ее более доступной. Следует отметить, однако, что шаг
проекций не является постоянным.
3. Схема с диффузором (см. рис. 4.23, в) обеспечивает непрерывный набор проекций, в диапазоне углов, определямом индикатриссой рассеивания диффузора. При наличии прецизионного устройства для управления положением фильтра появляется возможность на стадии восстановления интерферограммы получать простой фильтрацией пространственных частот проекционные данные, соответствующие различным ракурсам (см. схему двойного преобразования Фурье – рис. 3.1). В большинстве случаев для регистрации проекционных данных в диапазоне углов [0–180 ] достаточно освещения объекта с двух ортогональных направлений.
Внастоящей работе в основном использованы схемы а и в.
Внекоторых тестовых экспериментах использовалась схема а с одним объектным пучком, но с возможностью поворота исследуемого объекта относительно вертикальной оси z для получения многоракурсных проекций (аналогично методу интегральной фо-
тоупругости [2, 8, 97, 103–105]).
Как и в случае осесимметричных распределений, сначала оценим возможности процедуры реконструкции первого инвари-
анта тензора напряжений I1(x, y) (деформаций I(x, y)) на фантомных задачах, когда исходная информация представлена в виде точных проекционных данных. Затем сравним их с результатами тестовых экспериментов.
Далее, в соответствии с общей процедурой определения напряженно-деформированного состояния, найдем фиктивные деформации по реконструкции I1(x, y) ( I(x, y)). По интерферо-
106

граммам внутренних сечений определим суммарные деформации исследуемого сечения, деформации самого сечения, а затем и нормальные напряжения.
а)
б)
в)
G – растр D – диффузор Ref – опорный пучок
Рис. 4.23. Регистрация многоракурсных интерферограмм при исследовании напряженно-деформированного состояния фазовых объектов
107
4.4.2. Призма под действием плоского, круглого в плане штампа
Исследуемая модель представляет собой четырехгранную призму из полиметилметакрилата ОНС с поперечным сечением 80 80 мм2. Нагрузка по верхнему торцу призмы: 4 кН – плоским, круглым в плане штампом диаметром 20 мм, смещенным от оси симметрии к одной из граней на величину радиуса штампа а
(рис. 4.24).
Среднеквадратичная |
погрешность, % |
80 |
|
|
|
|
|
|
P |
60 |
|
|
|
ES |
|
|
|
|
|
|
SL |
|
|
|
|
|
|
|
|
|
2a . |
x |
|
40 |
|
|
|
GP |
|
||
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
3 |
6 |
9 |
12 |
15 |
18 |
a |
|
|
Число ракурсов, K |
|
z |
|
|||
|
|
|
|
|
|
|
|
Рис. 4.24. Зависимость среднеквадратичной ошибки реконструкции фантома в сечении z = 0,25a от числа проекций (ракурсов) К
4.4.2.1. Реконструкция распределения I1(x, y, z)
Реконструкция первого инварианта тензора напряжений I1(x, y, z) по фантому этой задачи была выполнена на сетке 65 65
для сечений z = 0,25а и z = а (а = 10 мм) [180–182].
Рассмотрено нескольких алгоритмов реконструкции, входящих в пакет TOPAS-Micro Института теоретической и прикладной механики СО РАН: Ерохина–Шнейдерова (ES), Шеппа– Логана (SL) и Гершберга–Папулиса (GP) [68]. Случайный шум во входных данных моделировался на уровне 1 %.
Зависимость среднеквадратичной ошибки 1 от числа проекций (при постоянном числе отсчетов во всех проекциях Np = 65) для вышеперечисленных алгоритмов представлена на рис. 4.24. Несмотря на то, что оценки дисперсии для этих алгоритмов, даваемые их авторами, отличаются в несколько раз, результаты реконструкции для первых двух алгоритмов (ES и SL) практически совпадают.
108

Среднеквадратичная ошибка 1 вычислялась следующим образом:
|
|
|
|
( |
( I |
) |
|
exact |
) |
2 |
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
i |
j |
|
i j |
|
|
|
i j |
|
, |
||
|
|
|
|
( |
|
) |
|
|
||||||
1 |
|
|
|
exact |
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
i |
j |
|
|
|
i j |
|
|
|
|
(4.17)
где
exact i j
– значения, соответствующие точному значению функ-
ции; i( Ij1 ) – реконструкции.
Погрешность реконструкции для алгоритмов Ерохина– Шнейдерова и Шеппа–Логана менее 10 %, а для для алгоритма Гершберга–Папулиса менее 5 % при числе ракурсов K более девяти. Следует отметить, что ошибки в определении пиковых значений max малы даже при малом числе ракурсов K : уже для K = 3 не превышают, как правило, ~1,5 % и очень слабо зависят от числа ракурсов [55].
Та же реконструкция была выполнена и по проекционным данным, полученным экспериментально в диапазоне углов [0–90 ]. Наличие плоскости симметрии позволило получить остальные проекции прямой инверсией исходных экспериментальных проекций. Число отсчетов во всех проекциях, как и при численном эксперименте, постоянно – Np = 65. Интерферограммы, соответствующие нескольким ракурсам, представлены на рис. 4.25.
Рис. 4.25. Многоракурсные интерферограммы абсолютной разности хода при внецентренном сжатии призмы плоским, круглым в плане штампом
109
Зависимость среднеквадратичной ошибки реконструкции 1 и погрешность в определении экстремальных значений max для сечения z = 0,25а приведены в табл. 4.1 [53].
Таблица 4.1
Зависимость погрешности реконструкции от числа проекций
Число |
Погрешности aлгоритмов реконструкции, % |
|||||||||
|
|
|
|
|
|
|
|
|
||
проекций |
|
|
|
|
|
|
|
|
|
|
|
ES |
|
SL |
|
GP |
|||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
K |
|
1 |
|
max |
1 |
|
max |
1 |
|
max |
|
|
|
|
|
|
|
|
|
|
|
3(2) |
60 |
62,5 |
|
0,2 |
62 |
|
0,82 |
22,2 |
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|
6(4) |
30 |
24,8 |
|
0,61 |
24,3 |
|
1,02 |
10,1 |
|
1,63 |
|
|
|
|
|
|
|
|
|
|
|
9(5) |
22,5 |
17,3 |
|
1,02 |
17 |
|
1,43 |
7,1 |
|
1,22 |
|
|
|
|
|
|
|
|
|
|
|
12(7) |
15 |
10,6 |
|
0,82 |
10,5 |
|
3 |
6 |
|
1,22 |
|
|
|
|
|
|
|
|
|
|
|
Таким образом, приемлемую для дальнейшего использования точность реконструкции, при реально присутствующих погрешностях определения порядка интерференционных полос, можно получить для алгоритмов ES и SL при числе ракурсов K не менее 12, а для GP – при K > 6. В зонах с экстремальными значениями уже трех-шести ракурсов достаточно для определения функции с хорошей точностью. Отметим также слабое возрастание погрешности max в алгоритме SL при увеличении числа проекций K .
На рис. 4.26 представлены результаты реконструкции распределения I1(x, y) в двух сечениях призмы: z = а (см. рис. 4.26, а) и z = 0,25а (см. рис. 4.26, б) при K = 12 и Np = 65 в виде трехмерных поверхностей и линий равного уровня. Гладкость проекционных данных для сечения z = а была использована для синтеза дополнительных проекций в промежутке между уже существующими с использованием сплайн-интерполяции. Таким образом, при реконструкции I1(x, y) в сечении z = а проекционные данные соответствовали числу ракурсов K = 24. Подобный подход не ведет к заметному увеличению точности реконструкции как таковой, однако позволяет существенно уменьшить амплитуду артефактов [68].
110