

Системы управления исполнительными механизмами
..pdfПо возможности регулирования:
–нерегулируемый гидропривод, у которого нельзя изменять скорость движения выходного звена ГИМ в процессе эксплуатации;
–регулируемый гидропривод, в котором в процессе его экс-
плуатации скорость выходного звена ГИМ можно изменять по требуемому закону.
В свою очередь, регулирование может быть дроссельным,
объемным, объемно-дроссельным или изменением скорости двига-
теля, приводящего в работу насос.
Кроме того, регулирование может быть ручным или автома-
тическим.
В зависимости от задач регулирования гидропривод может быть:
–стабилизационным;
–программным;
–следящим.
По схеме циркуляции рабочей жидкости:
–гидропривод с замкнутой схемой циркуляции, в котором ра-
бочая жидкость от гидродвигателя возвращается во всасывающую гидролинию насоса.
Гидропривод с замкнутой циркуляцией рабочей жидкости компактен, имеет небольшую массу и допускает большую частоту вращения ротора насоса без опасности возникновения кавитации, поскольку в такой системе во всасывающей линии давление всегда превышает атмосферное. К недостаткам следует отнести плохие условия для охлаждения рабочей жидкости, а также необходимость спускать из гидросистемы рабочую жидкость при замене или ремонте гидроаппаратуры;
–гидропривод с разомкнутой системой циркуляции, в кото-
ром рабочая жидкость постоянно сообщается с гидробаком или атмосферой. Достоинства такой схемы – хорошие условия для охлаждения и очистки рабочей жидкости. Однако такие гидроприводы громоздки и имеют большую массу, а частота вращения ротора насоса ограничивается допускаемыми (по условиям бескавитаци-
51
онной работы насоса) скоростями движения рабочей жидкости во всасывающем трубопроводе.
По источнику подачи рабочей жидкости:
–насосный гидропривод. В таком гидроприводе, получившем наибольшее распространение в технике, механическая энергия двигателя преобразуется насосом в гидравлическую энергию; носитель энергии – рабочая жидкость под давлением – нагнетается через напорную магистраль к ГИМ, где энергия потока жидкости преобразуется в механическую. Рабочая жидкость, отдав свою энергию ГИМ, возвращается либо обратно к насосу (замкнутая схема гидропривода), либо в бак (разомкнутая или открытая схема гидропривода). В общем случае в состав насосного гидропривода входят: гидропередача, гидроаппараты, кондиционеры рабочей жидкости, гидроемкости и гидролинии;
–магистральный гидропривод; в таком гидроприводе рабо-
чая жидкость нагнетается насосными станциями в напорную магистраль, к которой подключаются потребители гидравлической энергии;
–аккумуляторный гидропривод; в таком гидроприводе жид-
кость подается в гидролинию от заранее заряженного гидроаккумулятора. Этот тип гидропривода используется в основном в машинах и механизмах с кратковременными режимами работы, например в гибридных карьерных автомобилях.
По типу приводящего двигателя гидронасоса:
–с электроприводом;
–с приводом от ДВС;
–приводом от турбин и т.д.
Преимущества гидропривода и ГИМ следующие:
–возможность универсального преобразования механической характеристики ГИМ в соответствии с требованиями нагрузки;
–относительная простота управления и автоматизации;
–простота предохранения ГИМ и рабочих органов машин от перегрузок; надежность эксплуатации;
52
–широкий диапазон бесступенчатого регулирования скорости выходного звена;
–большая передаваемая мощность на единицу массы привода;
–надежная смазка трущихся поверхностей при применении минеральных масел в качестве рабочих жидкостей.
Недостатки гидропривода и ГИМ следующие:
–достаточно громоздки и требуют создания и распределения сжатой рабочей жидкости, т.е. наличия гидростанции;
–утечки рабочей жидкости через уплотнения и зазоры, особенно при высоких значениях давления;
–нагрев рабочей жидкости, что в ряде случаев требует применения специальных охладительных устройств и средств тепловой защиты;
–более низкий КПД (по приведенным выше причинам), чем у сопоставимых механических передач;
–необходимость обеспечения в процессе эксплуатации чистоты рабочей жидкости и защиты от проникновения в нее воздуха;
–пожароопасность в случае применения горючей рабочей жидкости.
При правильном выборе гидросхем и конструировании гидроузлов некоторые из перечисленных недостатков гидропривода можно устранить или значительно уменьшить их влияние на работу машин.
В целом в силу перечисленных недостатков в системах автоматизации технологических процессов и производственных установок ГИМ задействованы крайне мало (менее 1 % от общей массы ИМ).
На рис. 1.17 изображена типовая схема гидросистемы с регулируемым насосом 3, приводимым во вращение электродвигателем М. Насос 3 снабжен фильтром 4, установленным на всасывающем трубопроводе, и предохранительным клапаном 6.
Трехпозиционный четырехходовой гидрораспределитель 2 с ручным управлением осуществляет реверс поршня силового цилиндра 1 ГИМ с поступательным движением регулирующего ор-
53
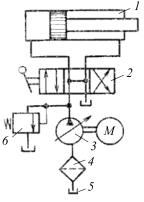
гана. В среднем положении гидрораспределителя 2 все его каналы соединяются с баком 5, что соответствует холостому ходу (разгрузке) насоса и «плавающему» состоянию поршня цилиндра.
Как динамический объект управления сам ГИМ представляет собой интегрирующее звено, у которого входным воздействием является разница значений давления жидкости в полостях рабочего цилиндра, а выходной координатой – перемещение штока поршня и, соответственно, рабочего (регулирующего) органа.
В автоматизированных СУИМ на основе гидравлики применяют электрогидравлические (ЭГИМ) и электропневмогидравлические исполнительные механизмы (ЭПГИМ). Для
срегулируемым насосом этой цели служат, в частности, различ-
иГИМ поступательного ного рода электрогидравлические уси-
движения |
лители (сервовентили). На рис. 1.18 |
|
представлен внешний вид сервовенти- |
ля для управления гидравлическими исполнительными механизмами выправо-подбивочно-рихтовочных машин типа ВПР.
Усилитель по своему функциональному назначению и техническим характеристикам может применяться для замены импортных аналогов – сервовентилей фирм MOOG, Dowty, ORSTA и других – в автоматических системах управления технологическими процессами на железной дороге.
Технические характеристики
Пределы изменения входного сигнала постоянного тока:
–для последовательного соединения катушек ±7,5 мА;
–для параллельного соединения катушек ±15 мА.
Рабочая среда – минеральные масла со следующими параметрами:
– вязкость в рабочем диапазоне температур масла от 7 до
70 мм2/с;
54

– рабочий диапазон температур масла от +20 до +70 °С;
– тонкость фильтрации не хуже
16 мкн.
Давление питания:
–минимальное: 1,6 МПа(16 кгс/см2);
–максимальное: 21 МПа(210 кгс/см2). Расход масла:
–при перепаде значений давления на
усилителе 7 МПа (70 кгс/см2) и макси- |
Рис. 1.18. Внешний вид |
||||||
мальном входном сигнале (38±4) л/мин. |
электрогидравлического |
||||||
Зона нечувствительности усилителя |
|||||||
не более 1 %. |
|
|
|
усилителя УЭГ.С-П |
|||
Нелинейность |
расходной |
характе- |
|||||
|
|||||||
|
ристики не более 10 %. |
|
|
||||
|
Гистерезис усилителя не более 3 %. |
||||||
|
Частота, соответствующая |
сдвигу |
|||||
|
фаз 90°, не менее 100 Гц. |
|
|
||||
|
Габаритныеразмеры 110×115×85 мм. |
||||||
|
Масса не более 1,7 кг. |
|
|
||||
|
Для управления ЭГИМ разработаны |
||||||
|
усилители |
мощности, обеспечивающие |
|||||
|
пропорциональный закон движения элек- |
||||||
|
трогидравлических клапанов (рис. 1.19). |
||||||
|
Используются |
для |
подачи |
командных |
|||
Рис. 1.19. Усилители |
электрических |
сигналов |
усилителю |
||||
мощности, |
который |
преобразовывает и |
|||||
мощности для |
усиливает электрические сигналы перед |
||||||
пропорциональных |
|||||||
отправкой на электромагниты, управ- |
|||||||
электрогидравлических |
|||||||
ляющие пропорциональными клапанами. |
|||||||
клапанов |
Таким образом, ЭГИМ и ЭПГИМ |
||||||
|
|||||||
как объекты управления, управляемые токовым сигналом (как правило, 4–20 мА), могут рассматриваться как пропорциональные динамические звенья.
55

1.2.5. Электромагнитные исполнительные механизмы
Электромагнитные исполнительные механизмы (ЭМИМ) с регулирующим органом называют электромагнитным вентилем. Это связано с тем, что они работают на запорные органы ЗРА типа «задвижка», а следовательно, в схемах двухпозиционного регулирования и дистанционного управления. Широко используются при автоматизации холодильных установок в качестве электромагнитных вентилей прямого действия с диаметром условного прохода не более 10 мм и непрямого действия с диаметром условного прохода 25–65 мм.
Таким образом, по конструкции электромагнитные вентили бывают прямого и непрямого действия. В электромагнитном вентиле прямого действия при подаче напряжения питания на обмотку электромагнита якорь втягивается, открывая основной клапан.
В электромагнитном вентиле непрямого действия электромагнитом открывается вспомогательный клапан, открывающий канал для среды, воздействующей на открытие основного клапана.
Общее устройство ЭМИМ прямого действия приведено на рис. 1.20.
Рис. 1.20. Общее устройство ЭМИМ: 1 – электрическая катушка; 2 – сердечник с клапаном; 3 – входной фланец; 4 – корпус; 5 – седло клапана; 6 – выходной фланец; 7 – пружина
56
Висходном состоянии пружина давит на сердечник и прижимает клапан к седлу. Проход закрыт. При подаче электрического тока на катушку в ней возникает электромагнитное поле, которое втягивает в катушку сердечник. Сердечник поднимает клапан, и проход открывается. Пока по катушке течет электрический ток, клапан будет открыт. При снятии с катушки тока электромагнитное поле исчезает, пружина прижимает сердечник
иклапан к седлу. Проход закрывается. Клапаны используются для управления потоками жидкости и газа. Электромагнитные клапаны различаются по сечению трубопровода, давлению среды, напряжению катушки.
Всистемах автоматизации ЭМИМ применяются редко и лишь в тех случаях, когда технологический процесс или установка допускают ударный режим закрытия-открытия задвижки. Для регулирования величины проходного сечения ЗРА такие механизмы не применяются.
1.3.Исполнительные механизмы переменной скорости
Внастоящее время в ряде технологических установок, таких
как паровые и водогрейные котлы, насосные станции первого и второго подъема, системы транспорта жидкостей и газов и многих других, исполнительные механизмы постоянной скорости, работающие на ЗРА, заменяют на ИМ переменной скорости – насосы, вентиляторы, компрессоры с регулируемым расходом за счет изменения скорости вращения электроприводов (обычно с помощью частотно-регулируемого привода – ЧРП). Это зачастую позволяет сэкономить до 40 % потребляемой электроэнергии.
Иногда оправданным, в частности для стабилизации давления жидкости в трубопроводе при широком диапазоне изменения расхода, является совместное управление двумя типами ИМ – постоянной скорости (ЗРА) и переменной скорости механизмов, позволяющих реализовать объемное регулирование.
57
ЭИМ переменной скорости обеспечивают следующее:
–автоматическое, дистанционное или ручное управление ка- кой-либо выходной координатой объекта: моментом, скоростью, положением рабочего органа рабочей машины или какой-либо технологической координатой, на которую воздействует рабочий орган (расход, давление, температура, уровень и т.п.);
–стабилизацию, программное, следящее или экстремальное управление выходной координатой;
– формирование сигналов обратных связей по выходной и промежуточным координатам объекта управления.
Основными параметрами, определяющими типоразмер ИМ переменной скорости, являются следующие:
–номинальная мощность электропривода в ваттах (Вт), киловаттах (кВт) или мегаваттах (МВт);
–номинальная скорость электродвигателя и выходного элемента электропривода (рад/с или об/мин);
–номинальное напряжение (В, кВ) и частота питающей сети (Гц);
–номинальные значения тока обмоток двигателя и др.
Насос как ИМ в системах автоматизации получил широкое распространение в сочетании с частотно-регулируемым электроприводом переменной скорости, что позволило за счет регулирования скорости электропривода отказаться от дроссельного регулирования расхода жидкой среды регулирующим клапаном и тем самым существенно сэкономить на электроэнергии.
Насос (водяная помпа, колонка) – проточная гидравлическая машина, служащая для перемещения и создания напора жидкости всех видов, в том числе механической смеси жидкости с твердыми
иколлоидными веществами, а также сжиженных газов. Машины для перекачки и создания напора насыщенных и ненасыщенных газов (газообразных жидкостей) получили название вентиляторов
икомпрессоров. По принципу действия и конструкции насосы подразделяются на следующие типы: центробежно-шнековые
58
(дисковые), винтовые (шнековые), поршневые, центробежные, осевые, вихревые, струйные, мембранные и др.
ТЭНы и холодильные установки как ИМ в системах автома-
тизации очень распространены как в промышленных объектах, так и в быту (отопление, кондиционирование, вентиляция, горячее водоснабжение и др.). Поскольку для регулирования температуры нагреваемого или охлаждаемого объекта необходимо менять действующее напряжение на нагрузке, по функциональной структуре такие ИМ во многом схожи с ИМ переменной скорости. При этом количество сгенерированной (поглощенной) тепловой энергии является неким аналогом объемного регулирования при изменении скорости ЭИМ, например насоса, т.е. изменении расхода и давления жидкости.
В качестве силовых преобразователей энергии здесь могут быть применены различные контактные и бесконтактные преобразователи. Наиболее распространены в системах автоматизации полупроводниковые (преимущественно симисторные) преобразователи с пропусканием в нагрузку целого числа полуволн питающего напряжения. Эти преобразователи в отличие от тиристорных и симисторных преобразователей с фазовым управлением удовлетворяют всем требованиям электромагнитной совместимости с иными объектами автоматизации.
ЭИМ переменной скорости – это автоматизированные электроприводы (АЭП), которые в зависимости от параметров регулируемых электродвигателей (типоисполнение, размещение, продолжительность включения, перегрузочная способность по току или электромагнитному моменту, степень защиты и др.) подразделяют на общепромышленные, крановые и краново-металлур- гические, станочные и т.п. Кроме того, различают регулируемые АЭП постоянного и переменного тока, АЭП с электромашинным, тиристорным, транзисторным, симисторным, частотным преобразователем, АЭП с микропроцессорным управлением или без такового и др.
59
Структура условного обозначения и основные параметры исполнительных механизмов приведены в работах [1–7].
Как будет видно из дальнейшего материала учебного пособия, понятия «электрический исполнительный механизм» и «автоматизированный электропривод», если абстрагироваться от структур- но-параметрических признаков систем управления ими, во многом схожи с понятием «электромеханические системы», а понятие «системы управления исполнительными механизмами переменной скорости» – с понятием «системы управления электроприводами». В связи с этим достаточно подробная классификация ИМ переменной скорости и их место в структуре той или иной СУИМ рассматриваются в последующих подразделах.
60