

Системы управления исполнительными механизмами
..pdfНа рис. 5.5 приведена совокупность механических характеристик, реализующих пуско-тормозные режимы в функции времени.
|
A |
|
|
5 |
|
|
|
|
8 |
|
2 |
|
3 |
|
|
6 |
Мс |
1 |
|
7 |
|
M |
|
|
|
||
9 |
0 |
Мк |
|
Мс |
|
||
|
|
|
|
10 |
11 |
|
|
|
|
|
|
|
|
4 |
|
A
Рис. 5.5. Совокупность механических характеристик АД с фазным ротором в пуско-тормозных режимах
Пуск АД производится в три ступени: вначале контактором KM6 отключается ступень противовключения (закорачиваются резисторы R1) и пуск происходит по искусственной характеристике 1. Затем с выдержками времени T1 и T2 происходит последовательное срабатывание контакторов KM7, KM8. Пуск происходит по искусственной характеристике 2, затем по естественной характеристике 3 до точки А установившегося состояния. Выдержки времени формируются с помощью реле ускорения и могут вручную подстраиваться на стадии наладки СУИМ. Применение семипозиционного командоконтроллера позволяет осуществлять разгон не только до номинальной скорости АД, но и до двух промежуточных скоростей.
Динамическое торможение реализуется также в функции времени в три ступени (см. характеристики 5, 6 и 7 на рис. 5.5) при
151
подключении контактором KM4 двух фаз статора к цепи постоянного тока.
Реверс АД производится торможением двигателя в режиме противовключения (см. характеристику 9) при полностью введенных сопротивлениях в цепи ротора. При скорости АД, близкой к нулевому значению, ступень противовключения отключается (закорачиваются резисторы R1) и происходит пуск двигателя
вобратном направлении (см. характеристики 9, 10 и 11).
Вкрановых электроприводах подъема применяют более сложные принципы и панели РКСУ, такие как ТСД-60. При этом для получения жестких механических характеристик АД в зоне малых скоростей подъема реализуют тиристорное широтно-им- пульсное регулирование [17–20].
5.2. Бесконтактные СУИМ постоянной скорости
Пуско-тормозные режимы бесконтактных СУИМ постоянной скорости реализуют, как правило, с применением асинхронных двигателей с короткозамкнутым ротором или синхронных двигателей с постоянными магнитами. Для маломощных ИМ (до нескольких десятков-сотен ватт) применяют однофазные двигатели, для более мощных – трехфазные. В любом случае речь идет о СУИМ с ЭИМ.
По принципу управления такие СУИМ подразделяются на следующие типы:
–ручного управления «на месте» с помощью кнопок или ключей управления на стационарном или местном переносном проводном пульте управления без обратных связей по координатам объекта управления;
–ручного дистанционного управления по командам оператора, передаваемым по промышленной сети от пульта управления, промышленного контроллера, сервера верхнего уровня управления без обратных связей по координатам объекта управления;
–ручного/автоматического управления «на месте» или дистанционного управления с контролем как минимум выходной ко-
152

ординаты объекта управления, по промышленной сети от пульта управления, промышленного контроллера, сервера верхнего уровня управления;
– ручного/автоматического управления «на месте» или дистанционного управления с реализацией функций интеллектуального микропроцессорного управления.
Заметим, что в любом случае СУИМ постоянной скорости предполагают возможность ручного управления (кнопки, ключи управления «на месте» или дистанционного управления, а также штурвалы управления ЗРА РО).
Кроме того, все бесконтактные СУИМ постоянной скорости содержат как минимум бесконтактные малоточные элементы управления (транзисторы, симисторы, тиристоры), как максимум – бесконтактные силовые элементы (симисторы или тиристоры).
На рис. 5.6 приведена обобщенная функциональная схема СУИМ, сочетающая изложенные выше принципы управления ИМ постоянной скорости.
|
|
|
|
|
|
|
|
|
|
Ручной«пуск-стоп-реверс» |
|
|
||||||||
Uз |
|
|
|
|
|
Uуа |
|
Uу |
|
|
|
ω |
|
|
|
|
|
|
y |
|
|
– |
ИУ |
|
ФЭ |
|
ПРР |
|
СПЭ |
|
Д |
|
ИМ |
|
РО |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДТК |
|
|
|
|
||||
|
|
|
|
|
|
|
Uур |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.6. Обобщенная функциональная схема СУИМ постоянной скорости
Обозначения на схеме:
ИУ – измерительное устройство; ФЭ – формирующий элемент; ПРР – переключатель режима работы;
СПЭ – силовой преобразователь энергии; Д – двигатель (привод) ИМ;
153
ИМ – исполнительный механизм; РО – рабочий орган;
ДТК – датчик технологической координаты;
Uз, Uос – маломощные сигналы задания и обратной связи (напряжение, ток или цифровой код);
Uуа, Uур, Uу – сигналы управления: автоматического, ручного, результирующего;
ω – скорость вращения (перемещения) привода ИМ; y – выходная координата СУИМ.
Измерительное устройство ИУ предназначено для масштабирования, линеаризации сигналов задания Uз и обратной связи Uос и вычисления сигнала ошибки регулирования выходной координаты СУИМ.
Формирующий элемент ФЭ выполняет следующие функции автоматического управления:
–формирование двухпозиционного регулирования нереверсивными ИМ типа «нагреватель» или «холодильник» (ТЭНы, вентиляторы, компрессоры и др.) с реализацией функции «пуск-стоп»
сконтролем конечного положения РО;
–формирование трехпозиционного регулирования реверсивными ИМ (клапаны, пробковые и шаровые краны, подъемнотранспортные механизмы и др.) с реализацией функции «пуск- стоп-реверс» как с датчиком положения РО, так и без него;
–формирование того или иного линейного закона регулирования реверсивными ИМ с контролем как минимум выходной технологической координаты СУИМ.
Формирующий элемент – основной элемент такой СУИМ, обеспечивающий требуемое качество управления. Синтез его – одна из основных задач исследования и проектирования СУИМ.
Переключатель режима работы ПРР – логический элемент, выполняющий функции безударного перехода с автоматического на ручной режим работы и обратно.
Силовой преобразователь энергии (СПЭ) – контактный или бесконтактный реверсивный пускатель, обеспечивающий соответ-
154
ствующие функции подключения обмоток двигателя к питающей сети и защиты двигателя.
Функции контактного пускателя выполняют силовые реле, контакторы или магнитные пускатели. Среди отечественных контактных пускателей в СУИМ наиболее распространены магнитные пускатели серии ПМ.
Функции бесконтактного пускателя выполняют симисторные или тиристорные реверсивные пускатели и устройства плавного пуска, торможения и защиты серий ПБР, ПБК, БКР, БУЭР, ФЦ, БСТ и др.
Остальные элементы представленной схемы СУИМ аналогичны рассмотренным ранее. Следует отметить, что среди отечественных ЭИМ постоянной скорости наибольшее применение нашли ЭИМ фирм «ЗЭиМ» (г. Чебоксары), ОАО «МЗТА» (г. Москва), ЗАО «Тулаэлектропривод» и др. Среди зарубежных – ЭИМ фирм KROMSHCRODER (Германия), REGADA (Словакия), DANFOSS (Дания) и др.
Остановимся более подробно на функциях и реализации алгоритмов ФЭ, поскольку именно этот элемент обеспечивает качество СУИМ в автоматическом режиме работы.
Релейно-импульсное управление (двух- и трехпозиционное)
формируется релейными регуляторами с широтно-импульсной (ШИМ) или время-импульсной (ВИМ) модуляцией при постоянном уровне задания скорости движения ИМ на время включения ЭИМ.
Широтно-импульсное управление ЭИМ предполагает задание двух параметров – периода T и скважности λ задания постоянной номинальной скорости двигателя. Период обычно задается постоянным в пределах от нескольких секунд до нескольких минут
взависимости от характера и требуемой производительности технологического процесса. Скважность меняют автоматически от 0 до 1 (в аналоговых СУИМ – обычно токовым сигналом 4–20 мА,
вцифровых СУИМ – цифровым 8–16-разрядным кодом в зависимости от величины ошибки и алгоритма регулирования). Многие
155
неполноповоротные ИМ функционируют в повторно-кратковре- менном режиме с нормированной предельной скважностью 25 %.
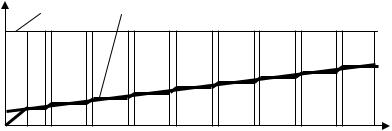
Релейно-импульсное управление с ШИМ-модуляцией позволяет реализовать типовые законы управления, свойственные регуляторам «вход-выход». На рис 5.7 проиллюстрирован принцип формирования формирующим элементом ПИ-закона управления положением координаты φ РО ИМ.
Uу ≡ ωн φ
Uм
t
0 |
T |
2T |
3T |
4T |
5T |
6T |
7T |
8T |
|
Рис. 5.7. Широтно-импульсная модуляция в СУИМ постоянной скорости
Координата положения РО является интегралом от скорости вращения ИМ. Поскольку на интервале включения скорость ИМ постоянна и равна ωн, положение φ РО меняется линейно в функции времени. Поскольку на первом интервале скважность управления значительно выше, чем на последующих, величина изменения положения на первом периоде T значительно выше, чем на последующих периодах управления. В целом, аппроксимируя кривую изменения положения (см. пунктирную линию на рис. 5.7), можно заметить, что изменение положения подчиняется ПИ-закону.
Релейно-импульсное управление с ВИМ-модуляцией, как и с ШИМ-модуляцией, позволяет реализовать типовые законы управления. На рис. 5.8 проиллюстрирован принцип формирования формирующим элементом (ФЭ) ПИ-закона управления положением РО ИМ.
Частота следования импульсов управления и, соответственно, включения ЭИМ в начальный период времени значительно выше,
156
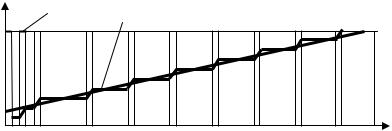
чем в последующее время. При этом аппроксимированная кривая изменения положения РО (см. пунктирную линию на рис. 5.8) соответствует ПИ-закону.
Uу ≡ ωн |
φ |
|
Uм
t
0 
Рис. 5.8. Время-импульсная модуляция в СУИМ постоянной скорости
ФЭ реализуют как на аналоговой, так и на цифровой элементной базе.
Среди первых в отечественной промышленности наиболее распространены элементы, реализуемые комплексами АСУТП «Контур», «Контур-2», «Каскад» и др. Среди вторых – системы на базе микропроцессорных контроллеров «МЕТАКОН», МС8 ООО
НПФ «КонтрАвт», контроллеров и приводов ЗАО «Тулаэлектропривод», интеллектуальных модулей вывода МВУ8 и контроллеров фирмы «ОВЕН» и др.
На рис. 5.9 представлен пример схемы управления наиболее распространенными электрическими исполнительными механизмами типа МЭО, МЭОФ производства ОАО «ЗЭиМ» (г. Чебоксары), который в данной схеме осуществляет управление заслонкой. Для измерения технологического параметра (температуры) используется термопара, непосредственно подключенная ко входу микропроцессорного измерительного регулятора типа «МЕТАКОН 514-Т», специально разработанного для управления исполнительными механизмами интегрирующего типа. Они представляют собой ПДД-регуляторы микропроцессорные и относятся к серии «МЕТАКОН-5×4». Осуществляют ПДД-регулирование
157

А1 – механизм электрический однооборотный типа МЭО, МЭОФ; ЕС1 – регулятор микропроцессорный измерительный типа «МЕТАКОН 514-Т»; ЕР1 – блок питания постоянного тока БП-24-0,5;
ES1 – фильтр сетевой ФС-220;
ESC1 – блок коммутации реверсивный БКР;
ЕТ1 – преобразователь термоэлектрический (термопара); FU1, FU2, FU3 – предохранители плавкие;
Х1 – зажим электрический наборный
Рис. 5.9. Управление однооборотным исполнительным механизмом постоянной скорости типа МЭО 16/63 0,25-У–01
158
с широтно-импульсным управлением реверсивными механизмами, обеспечивают аварийную сигнализацию по двум независимым уровням в каждом канале (число каналов: 1, 2, 3), а также реализуют режим автонастройки.
При большом удалении вторичных приборов от датчиков температуры последние подключают к регулятору «МЕТАКОН-5×4» через преобразователь«напряжение– ток» свыходнымтоком4–20 мА.
В качестве усилителя выходного сигнала регулятора применен симисторный блок коммутации реверсивный типа БКР. Этот блок предназначен для бесконтактного управления асинхронными электродвигателями исполнительных механизмов типа МЭО, электромагнитными клапанами. Применяется совместно с регуляторами «МЕТАКОН-5×4», «МЕТАКОН 614».
Конечные выключатели S1, S2 крайних положений исполнительного механизма в соответствии с рекомендациями производителя механизмов включены в цепи управления, формирующие сигналы «больше» и «меньше». Дополнительные конечные выключатели S3, S4 механизма и потенциометрические датчики положения R1, R2 могут быть использованы по своему прямому функциональному назначению при решении задач автоматизации конкретной технологической установки.
На рис. 5.10 представлена схема управления исполнительным механизмом постоянной скорости типа ВПК производства ЗАО «Тулаэлектропривод». Большинство приводов данного производителя предназначено для установки на запорную арматуру, что не исключает использование такой арматуры и в качестве регулирующей. Вместе с тем запорная арматура, как правило, используется в качестве двухпозиционных регуляторов. В этом случае целесообразно применение контроллеров типа «МЕТАКОН-512». Питание встраиваемого в головку удаленной термопары преобразователя температуры в токовый сигнал 4–20 мА обеспечивается постоянным стабилизированным напряжением 24 В, а контактами реле БПР включаются магнитные пускатели подачи на трехфазный электродвигатель напряжения 380 В частотой 50 Гц.
159
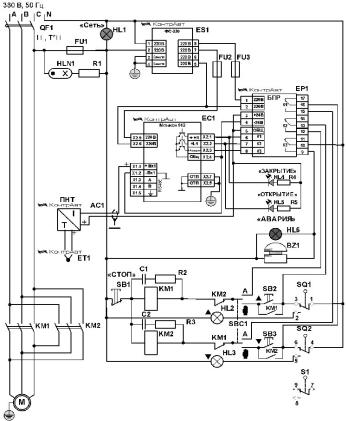
М – электропривод типа ВПК;
SQ1 – конечный микровыключатель открытия;
SQ2 – конечный микровыключатель закрытия;
S1 – дополнительный путевой выключатель; HL1…HL6 – световые сигнализаторы;
HLN1 – неоновая лампа сигнализации перегорания предохранителя; SB1…SB3 – кнопки управления;
QF1 – автоматический выключатель;
KM1 – магнитный пускатель открытия;
KM2 – магнитный пускатель закрытия;
AC1 – преобразователь «напряжение – ток» измерительный ПНТ;
EC1 – регулятор микропроцессорный измерительный типа «МЕТАКОН 512-Т»; EP1 – блок питания и реле БПР;
ES1 – фильтр сетевой ФС-220;
ET1 – преобразователь термоэлектрический (термопара); FU1, FU2, FU3 – предохранители плавкие
Рис. 5.10. Управление электроприводом типа ВПК производства ЗАО «Тулаэлектропривод»
160