

Системы управления исполнительными механизмами
..pdf6.2.3. Апериодический оптимум
Апериодический оптимум (АО) контуров регулирования применяют, когда перерегулирование выходной координаты должно отсутствовать (многие СУИМ не допускают перерегулирования, например, по координатам положения РО, температуры, давления и т.п.).
В зависимости от желаемого порядка n настроенного контура различают апериодические оптимумы первого, второго и третьего порядка.
Для n = 1 имеем
Wз р 1 Т р 1 Koc ;
Wp р 1 Т р; |
|
(6.4) |
||
Wpег р |
1 Woc |
|
. |
|
T pWoy |
р |
|||
|
|
|||
Для n = 2 имеем
Wз р 1 Т р 1 Т р 1 Koc ;
Wp р 1 Т р Т р 2 ; |
|
|
|
(6.5) |
||||||||||
Wpег р |
|
|
|
|
|
1 Woc |
|
. |
|
|
|
|||
T p Т р |
2 Woy р |
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||||
Для n = 3 имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wз р 1 Т р 1 Т р 1 Т р 1 Koc ; |
|
|||||||||||||
Wp р 1 |
|
|
2 |
р |
2 |
Т |
р |
|
|
; |
|
(6.6) |
||
Т |
|
3 Т р |
|
|||||||||||
Wpег р |
|
|
|
|
|
|
|
1 Woc |
|
|
|
. |
|
|
2 |
р |
2 |
Т |
р |
3 |
|
|
р |
|
|||||
|
Т |
|
Т р Woy |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
181 |
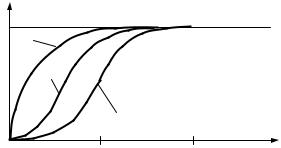
Кривые переходных процессов в апериодических системах первого, второго и третьего порядка приведены на рис. 6.3 и обозначены соответствующими цифрами (см. кривые 1, 2, 3).
1 |
|
|
1 |
|
|
2 |
|
|
|
3 |
|
0 |
|
|
4 T |
8 T |
t |
Рис. 6.3. Кривые переходных процессов в апериодических системах первого, второго и третьего порядка
6.3. Типовая методика структурно-параметрического синтеза
Ниже приведена типовая методика синтеза контуров регулирования по желаемой передаточной функции разомкнутого контура, имеющих, в частности, настройки на технический, симметричный и апериодические оптимумы.
Рассматриваемая методика широко применяется при синтезе систем подчиненного регулирования координат электроприводов и базируется на компенсации устройством управления больших постоянных времени (БПВ) объекта управления. Последовательность этапов синтеза следующая:
1. Структурно-параметрическая декомпозиция объекта управления.
Линейный объект управления разбивают на n последовательно соединенных динамических звеньев с одним или двумя доминирующими полюсами (апериодические первого-второго порядка и интегрирующие звенья); в объект регулирования каждого контура последовательно включают фильтр (апериодическое звено первого порядка) с эквивалентной малой постоянной времени
182
(ЭМПВ) T i, i = 1,…, n; величину ЭМПВ T i каждого контура регулирования выбирают как минимум в 2 раза больше эквивалентной малой постоянной времени предыдущего контура регулирова-
ния, т.е. T i 2T i–1, i = 2, …, n.
В результате структурно-параметрической декомпозиции в объекте каждого контура регулирования должны быть выделены одна-две БПВ и одна ЭМПВ T i.
2. Выбор критерия качества регулирования контура.
За критерий качества регулирования каждого контура будем принимать желаемую передаточную функцию разомкнутого контура. Для электромеханических СУИМ целесообразно применять настройки контуров регулирования на ТО, СО или АО. Желаемую передаточную функцию разомкнутого контура в этом случае записывают в виде формул (6.1), (6.3), (6.4), (6.5) или формул (6.6).
3. Определение структуры и параметров регулятора каждого контура регулирования (структурно-параметрический синтез регуляторов).
Передаточная функция оптимального регулятора i-го контура определяется в виде
Wpегi р |
Wp желi p |
, |
(6.7) |
|
Wоуi p Wосi p |
||||
|
|
|
где Wоу i(p) – передаточная функция объекта регулирования, входящая в контур регулирования; Wос i(p) – передаточная функция звена отрицательной обратной связи i-го контура регулирования.
Структура регулятора в соответствии с формулой (6.7), как правило, является типовой. Далее производится расчет численных значений параметров синтезированных регуляторов (коэффициентов передач, постоянных времени интегрирования, дифференцирования).
183
4. Выбор элементной базы и расчет параметров принципиальной схемы регулятора каждого контура.
Современные электронные устройства управления непрерывных систем управления реализуют, как правило, на основе операционных усилителей в интегральном исполнении. В частности, в системах управления электроприводами широкое распространение получили следующие серии операционных усилителей: К140,
К153, К553 и др.
Расчет параметров принципиальной схемы регулятора сводится к расчету численных значений резисторов и конденсаторов во входной цепи и в цепи обратной связи операционного усилителя.
184
7. СИСТЕМЫ РЕГУЛИРОВАНИЯ СКОРОСТИ ЭИМ
Скорость движения рабочих органов исполнительных механизмов (РО ИМ) – одна из основных управляемых координат в электромеханических СУИМ. Управление угловой или линейной скоростью движения РО осуществляется посредством электриче-
ских исполнительных механизмов (ЭИМ) переменной скорости.
При этом для регулирования потоков жидкостей, газов и сыпучих материалов ряд ЭИМ переменой скорости работает по принципу дросселирования, изменяя сечение потока (ЭИМ клапанов, кранов, шиберов и др.). Но, как правило, такие СУИМ работают по принципу объемного регулирования, изменяя скорость перемещения потока (ЭИМ насосов, компрессоров, вентиляторов и др.). В качестве приводов ИМ применяют как приводы постоянного, так
иприводы переменного тока. В последние годы наблюдается устойчивая тенденция применения частотно-регулируемых асинхронных и синхронных электроприводов ИМ, а также исключительно функционально и энергоэффективных вентильных электроприводов. Ниже рассмотрены основные принципы построения
ивопросы синтеза некоторых электромеханических систем регулирования скорости.
7.1. Система регулирования скорости тиристорный преобразователь – двигатель постоянного тока
Тиристорные системы автоматического регулирования (САР) скорости электроприводов постоянного и переменного тока в структурном плане представляют собой двухконтурные системы с внешним контуром регулирования скорости и подчиненным контуром регулирования тока (электромагнитного момента). Применение внутренних контуров САР обеспечивает оптимальное регулирование и простоту ограничения подчиненных координат на допустимых уровнях.
185

Синтез системы тиристорный преобразователь – двигатель постоянного тока (ТП – Д) осуществляют в два этапа.
1. Синтез контура регулирования тока якоря.
Допущение при синтезе: пренебрегаем влиянием обратной связи по ЭДС двигателя, т.е. полагаем eд = 0. Допущение вполне оправдано, поскольку изменение скорости (ЭДС), как правило, происходит гораздо медленнее в сравнении с током якоря. В качестве условия, гарантирующего обоснованность такого пренебрежения, принимают следующее: Tм 4T . Если это условие не соблюдается, то пренебрежение влиянием обратной связи по ЭДС при синтезе приводит к тому, что контур тока якоря становится статическим и электропривод недоиспользуется по перегрузочной способности при пуске и торможении. В этом случае необходимо вводить компенсацию ЭДС двигателя [17, 18].
Структурная схема контура регулирования тока якоря приведена на рис. 7.1.
|
? |
|
|
Фильтр |
|
|
ТП |
|
Якорная цепь ДПТ |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Uзт |
|
|
Uрт |
|
1 |
|
Uу |
|
Kтп |
|
eп |
|
|
1 / Rэ |
|
iя |
|
Wрт (P) |
|
|
|
|
|||||||||||
|
– |
|
|
TфртP + 1 |
|
|
TтпP + 1 |
eд |
– |
|
TЭP + 1 |
|
||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Uт |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Фильтр
1
TфдтP + 1  Kт
Kт
Рис. 7.1. Структурная схема контура регулирования тока якоря
Применим типовую методику структурно-параметрического синтеза, рассмотренную выше. Этапы синтеза:
1. Параметрическая декомпозиция объекта управления:
–большие постоянные времени (БПВ): Tэ;
–малые постоянные времени (МПВ): Tтп, Tфрт, Tфдт;
–эквивалентная малая постоянная времени контура (ЭМПВ):
186

T т = Tтп + Tфрт + Tфдт.
2. Задание критерия качества в виде желаемой передаточной функции разомкнутого контура (настройку замкнутого контура регулирования тока якоря будем осуществлять на технический оптимум – ТО):
Wр жел Р 1 2Т тР Т тР 1 .
3. Синтез структуры и параметров регулятора.
Передаточная функция регулятора тока якоря
|
W |
P |
|
1 2Т тР Т тР |
1 |
ТэР 1 Т тР 1 |
|
||||
Wpт P |
p жел |
|
|
|
|
|
|
|
|
|
|
Wоу P Wос P |
|
|
|
|
KтпKт Rэ |
||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
ТэР 1 |
. |
|
|
|
|
|
|
|
|
2Т |
т |
KтпKт Р |
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
э |
|
|
|
|
Таким образом, структура регулятора тока ПИ, обеспечивающего компенсацию одной БПВ, – Tэ.
Параметры регулятора тока:
– коэффициент передачи регулятора Kрт |
ТэRэ |
; |
|
2Т тKтпKт |
|||
|
|
– постоянная времени интегрирования Ти 2Т т KтпKт ;
Rэ
– постоянная времени изодромного звена Tиз = Tэ.
Заметим, что здесь лишь два независимых параметра, по-
скольку Kрт = Tиз/Tи.
4. Расчет параметров регулятора.
Принципиальная схема регулятора тока на основе операционного усилителя приведена на рис. 7.2. Расчету подлежат значения резисторов Rзт, Rот, Rт и емкости конденсатора Cот. Заметим, что число параметров принципиальной схемы регулятора (их четыре) превышает число независимых параметров регулятора, получен-
187

ных в результате синтеза (их только два). Очевидно, что необходимо задаться какими-то параметрами, условиями или соотношениями. Будем использовать следующую последовательность расчета параметров:
а) зададимся значением емкости Cот в пределах (1…2)10–6 Фарады;
|
Rот |
Cот |
Uзт |
Rзт |
Uрт = Uу |
|
||
|
Rт |
A1 |
|
Uдт |
|
Рис. 7.2. Принципиальная схема ПИ-регулятора тока
б) примем, что максимальное напряжение задания, обеспечивающее ограничение тока якоря на допустимом уровне, Uзт max = 10 В, т.е. несколько меньше напряжения насыщения операционных усилителей; фактически заданием этого напряжения мы однозначно определяем величину контурного коэффициента усиления, т.е.
1/Kт = imax / Uзт max = imax / 10;
в) используем соотношения, справедливые для статических режимов любых операционных усилителей с собственным коэффициентом передачи свыше 20 000:
Uзт max / Rзт = Uдт max / Rт = Kт / Kдт.
Тогда порядок расчета резисторов будет следующим:
1.Rот = Tиз / Cот = Tэ / Cот .
2.Rзт = Tи / Cот = 2 T т Kтп Kт / Rэ Cот = Kт Rт / Kдт, откуда Rт = 2 T т Kтп Kдт / Rэ Cот.
3.Rзт = Rт Uзт max / Uдт max, где Uдт max = Kдт imax, Uдт max 10 В.
188

Если рассчитанные величины резисторов Rзт и Rт окажутся менее 1 кОм, необходимо изменить соответствующим образом
значение Cот.
Примечание: величины резисторов и емкостей выбираются из стандартных рядов.
Передаточная функция синтезированного замкнутого контура регулирования тока якоря (ЗКРТ), настроенного на технический оптимум, имеет вид
W |
Р |
1 Kт |
|
|
1 Kт |
|
|
1 Kт |
, |
2Т тР Т тР 1 1 |
|
|
|||||||
зкрт |
|
|
2Т тР 1 |
|
ТтР 1 |
||||
|
|
|
|
||||||
где Tт – постоянная времени замкнутого контура тока якоря, аппроксимированного апериодическим звеном первого порядка, Тт 2Т т.
Величина Tт зависит прежде всего от пульсности тиристорного преобразователя и обычно находится впределах 0,005–0,015 с.
2. Синтез контура регулирования скорости.
Структурная схема замкнутого контура регулирования скорости (ЗКРС) приведена на рис. 7.3. Синтез регулятора скорости проведем с применением типовой методики, изложенной выше. В качестве допущения будем полагать, что статическая нагрузка на валу электропривода отсутствует, т.е. ic = 0.
1. Параметрическая декомпозиция объекта управления:
–БПВ: Tм;
–МПВ: Tт, Tфрс, Tфдс;
–ЭМПВ: T с = Tт + Tфрс + Tфдс.
2. Задание критерия качества в виде желаемой передаточной функции разомкнутого контура (рассмотрим два варианта):
а) настройка на технический оптимум (ТО):
Wр жел Р 1 2Т сР Т сР 1 ;
б) настройка на симметричный оптимум (СО):
Wр жел Р 4Т сР 1  8Т2сР2 Т сР 1 .
8Т2сР2 Т сР 1 .
189

|
|
|
|
|
|
|
|
|
|
|
ic |
|
|
|
|
|
? |
|
|
Фильтр |
|
|
ЗКРТ |
|
– |
Мех. часть ДПТ |
|||||||
Uзс |
|
Uрс |
|
1 |
|
U |
|
1/Kт |
|
i |
|
|
Rэ Kд |
|
|
|
|
|
|
|
|
||||||||||||
|
Wрс (P) |
|
|
зт |
|
|
|
|
|
|||||||
|
|
TФРСP+1 |
|
|
TТP+1 |
|
|
|
|
TМP |
|
|||||
– |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Uс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Фильтр
1
TфдсP+1  Kс
Kс
Рис. 7.3. Структурная схема контура регулирования скорости
3. Синтез структуры и параметров регулятора:
а) при настройке на технический оптимум (ТО) передаточная функция регулятора скорости
|
Wp жел P |
|
|
|
|
|
|
|
|
Wpc P |
|
|
1 |
2Т c Р Т c Р 1 KтТмР Т сР 1 |
|
||||
Wоу P Wос P |
|
|
|
|
|
RэKдKс |
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
KтТм |
|
|
; |
|
|
|
|
2Т |
R K |
K |
|
|
|||
|
|
|
|
|
c э д |
|
с |
|
|
таким образом, структура регулятора скорости – П;
– параметр П-регулятора – коэффициент его передачи:
Kрс |
KтТм |
; |
|
2Т c RэKдKс |
|||
|
|
б) при настройке на симметричный оптимум (СО) передаточная функция регулятора скорости
Wpc P |
Wp жел P |
|
|
Wоу P Wос P |
|||
|
|
|
|
|
c |
|
c |
|
c |
|
т |
|
м |
|
с |
|
|
|
|
c |
|
т |
|
м |
||
|
|
4Т |
|
Р 1 8Т2 |
Р2 |
Т |
Р 1 |
K |
Т |
|
Р Т |
|
Р 1 |
|
|
4Т |
|
Р 1 |
K |
Т |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
RэKдKс |
|
|
|
|
|
|
|
8Т2c RэKдKс |
KтТм Р |
||||||||||
190 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|