

Системы управления исполнительными механизмами
..pdfРЭ Интегратор
Uзс |
Uрэ |
|
– |
1 |
1 |
|
|
U зс |
|
|
|
|
|||
|
TзиP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.15. Структурная схема ЗИ, обеспечивающая постоянство ускорения электропривода
Реакция ЗИ на различные по величине ступенчатые воздействия приведена на рис. 5.16.
Uзи
Uзи 2
Uзи 1
t
0 |
tрег1 |
< |
tрег2 |
Рис. 5.16. Реакция ЗИ на скачкообразное изменение задающего воздействия
Задатчик интенсивности устанавливают на входе замкнутого контура регулирования скорости, который отрабатывает линейное задание скорости с некоторой динамической ошибкой, т.е. максимальное ускорение электропривода будет определяться только параметрами ЗИ (Uрэ max, Tзи) и коэффициентом передачи замкнутого контура скорости (1/Kc):
171

max = (d /dt)max = Uрэ max/Tзи Kc.
Структурная схема ЗИ, обеспечивающего постоянство времени регулирования при ступенчатых изменениях задающего воздействия, приведена на рис. 5.17.
Uзс |
|
Uзи = U зс |
|
1 / TзиP
–
е ТзиР
Рис. 5.17. Структурная схема ЗИ, обеспечивающего постоянство времени регулирования скорости
Реакция такого ЗИ на ступенчатые изменения задающего воздействия приведена на рис. 5.18. Как видим, время отработки произвольного по величине скачка задания скорости постоянно и равно постоянной времени Tзи. Ускорение электропривода с таким ЗИ – величина переменная и зависит от приращения скорости за время Tзи.
Uзи |
|
Uзи 2 |
|
Uзи 1 |
|
|
t |
0 |
Tзи |
Рис. 5.18. Реакция ЗИ на скачкообразное |
|
|
изменение задающего воздействия |
Задатчик интенсивности второго порядка в отличие от рассмотренных ЗИ содержит интегратор второго порядка, что позво-
172
ляет ограничить на допустимом уровне не только первую, но и вторую производную регулируемой координаты. Если он установлен на входе замкнутого контура регулирования скорости, то на допустимых уровнях будут ограничены ускорение и рывок РО ИМ. Наиболее простая реализация такого ЗИ – апериодический фильтр второго порядка:
W P |
|
1 |
. |
(5.1) |
T P 1 T P 1 |
||||
|
1 |
2 |
|
|
Время отработки произвольного по величине скачка задания скорости здесь постоянно, так как звено (5.1) является линейным. Максимальное ускорение и рывок рабочего органы будут определяться величинами постоянных времени T1 и T2.
В позиционно-контурных системах ЧПУ иногда реализуется возможность ограничения координат СУИМ за счет формирования такой программной траектории исполнительного механизма, которая при хорошо прогнозируемых возмущающих воздействиях на рабочий орган позволяет ограничить уровни его скоростей и уско-
рений [17, 24, 25].
Ограничение координат СУИМ посредством ограничения за-
дающих воздействий нашло широкое применение в многоконтурных электромеханических СУИМ и прежде всего в системах подчиненного регулирования координат электроприводов постоянного и переменного тока. Ограничение задающих воздействий внутренних контуров регулирования осуществляется за счет ограничения выходных сигналов регуляторов старших по отношению к ним контуров. Например, в САР скорости с подчиненным контуром регулирования тока якоря выходной сигнал регулятора скорости используется для ограничения тока якоря.
5.5. Системы следящего управления, понятие добротности
Эти системы управления функционируют исключительно в режимах малых отклонений координат, т.е. ни одна координата СУИМ (объекта управления и регуляторов) не выходит на режим
173

ограничения. Перемещение рабочего органа осуществляется по произвольному, заранее неизвестному закону, определяемому внешней средой. К следящим СУИМ относятся, в частности, контурные СЧПУ, системы слежения за пространственным перемещением летательных аппаратов, системы наведения на цель и др.
Основной показатель функционирования следящих СУИМ – динамическая точность отработки достаточно плавно изменяемого задающего воздействия в условиях возмущающих воздействий на систему. Полная количественная оценка точности следящих СУИМ производится в результате анализа их работы в условиях совместного влияния задающих и возмущающих воздействий, которые, как правило, имеют стохастический (случайный) характер. В связи с этим сложилась практика оценки точности этих систем по точности воспроизведения лишь задающих воздействий, меняющихся с постоянной скоростью, постоянным ускорением или по гармоническому закону.
Для оценки точности отработки задающих воздействий с постоянной скоростью и ускорением вводится понятие добротности САУ по скорости и ускорению.
Добротность по скорости в следящей системе можно оценить по формуле
D з ,
уст
где з – заданная постоянная скорость следящей системы (постоянная «заводка» по скорости); уст – установившееся значение
динамической ошибки отработки заданного положения следящих СУИМ, изменяющегося по линейному закону.
Чем выше Dω, тем меньше уст при неизменной «заводке» ( з = const), а следовательно, более качественной будет система. На рис. 5.19 приведена реакция следящей системы с астатизмом нулевого порядка на постоянную «заводку».
174

з

уст 
ωз = сonst
0 |
t |
Рис. 5.19. Реакция следящей системы с астатизмом нулевого порядка на постоянную «заводку» по скорости
Добротность по ускорению в следящей системе можно оценить по формуле
D з ,
уст
где εз – заданное постоянное ускорение рабочего органа следящей системы (постоянная «заводка» по ускорению).
Реакция следящей системы с астатизмом первого порядка на постоянную «заводку» по скорости приведена на рис. 5.20.
з ωз
уст 

εз = сonst 
0 |
t |
Рис. 5.20. Реакция следящей системы с астатизмом первого порядка на постоянную «заводку» по ускорению
175
Заметим, что постоянная установившаяся ошибка слеженияуст при линейном задании положения будет иметь место, если
в структуре разомкнутого контура СУИМ имеется одно интегрирующее звено.
Постоянная установившаяся ошибка слежения уст при
квадратичном задании положения будет иметь место, если в структуре разомкнутого контура СУИМ имеется два интегрирующих звена.
По отношению к задающему воздействию следящая СУИМ
синтегрирующим ИМ будет обладать:
–астатизмом нулевого порядка при применении пропорционального (П) регулятора положения;
–астатизмом первого порядка при применении пропорцио- нально-интегрального (ПИ) регулятора положения.
При астатизме первого порядка без ошибки отрабатывается
входной сигнал (задающее воздействие по положению рабочего органа), меняющийся с постоянной скоростью. Обеспечение астатизма второго порядка связано с проблемой обеспечения устойчивости системы, и регуляторы положения со структурой ПИ2 в следящих СУИМ не применяются. Более эффективным средством повышения точности и, соответственно, добротности следящих СУИМ является применение комбинированного управления (систем, работающих одновременно по отклонению и возмущению), а также введение инвариантности по задающему и возмущающему воздействию [21–23].
176
6. СИНТЕЗ СУИМ ПЕРЕМЕННОЙ СКОРОСТИ
Такого рода СУИМ базируются на применении ЭИМ и реали-
зуют принцип объемного регулирования, позволяющий за счет из-
менения скорости вращения электропривода механизма (насоса, вентилятора, компрессора и др.) должным образом воздействовать на ту или иную технологическую координату – температуру, давление, расход, уровень, концентрацию и т.п. При этом «дросселирование» на трубопроводах не применяют или применяют в качестве дополнительной меры воздействия на выходную координату. Это позволяет существенно сэкономить на потреблении электроэнергии.
СУИМ переменной скорости требуют, как правило, регулирования не только самой скорости электродвигателя, но и оптимизации режимов изменения электрических (электромагнитных) координат электропривода. В основе синтеза таких СУИМ лежит соподчинение координат объекта управления и, соответственно, метод подчиненного регулирования.
6.1. Подчиненное регулирование координат
Стуктурная схема многоконтурной СУИМ с подчиненным регулированием координат объекта управления приведена на рис. 6.1.
|
|
Устройство управления |
|
Объект управления |
|||||||||||
xз n |
|
|
xз n–1 |
xз 1 |
|
|
uу |
|
|
x1 |
… |
|
|
xn |
|
– |
|
W р n(p) |
… |
– |
|
Wр 1(p) |
|
Wоу 1(p) |
|
|
Wоу n(p) |
|
|
||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Wос 1(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wос n (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.1. Стуктурная схема многоконтурной СУИМ с подчиненным регулированием координат объекта управления
177
Основные положения принципа подчиненного регулирования координат изложены ниже.
1. Объект управления представляют в виде n последовательно соединенных простейших линейных динамических звеньев с одним-двумя доминирующими полюсами (интегральных, апериодических первого-второго порядка) – Wоу 1(p), Wоу 2(p), …, Wоу n(p), где n – число контролируемых переменных.
2. В передаточную функцию младшего подобъекта управления Wоу 1(p) включают фильтр с эквивалентной малой (некомпенсированной) постоянной времени контура T , определяющей такие важнейшие свойства системы управления, как быстродействие, точность и помехозащищенность.
3.Устройство управления представляют в виде n последовательно соединенных регуляторов класса «вход-выход».
4.Синтез СУИМ начинают с младшего (внутреннего) контура регулирования и заканчивают старшим (внешним) контуром, применяя единую типовую методику (см. подраздел 6.3).
5.Каждый замкнутый синтезированный контур регулирования представляет собой оптимальный в некотором смысле линейный фильтр первого–третьего порядка. При этом оперируют понятием «оптимальные настройки контура».
6.Каждый синтезированный замкнутый контур регулирования аппроксимируют оптимальным звеном первого-второго порядка и после синтеза присоединяют к объекту управления последующего контура.
7.Ограничение координат объекта управления на допустимых уровнях осуществляют ограничением задающих воздействий соответствующих контуров регулирования.
6.2.Оптимальные настройки контуров регулирования
Вмногоконтурных электромеханических системах подчиненного регулирования координат наиболее распространены настройки отдельных контуров на технический (модульный), симметричный и апериодический оптимумы [16–18, 23].
178
6.2.1. Технический оптимум
При настройке контуров регулирования СУИМ на технический оптимум (ТО) передаточную функцию замкнутого контура регулирования представляют в виде фильтра Баттерворта второго порядка:
Wз р 1 2Т р Т р 1 1 Koc .
Передаточная функция разомкнутого контура имеет вид
Wp р 1 |
2Т р Т р 1 . |
(6.1) |
Передаточная функция оптимального регулятора в этом случае имеет вид
Wpег р |
1 Wос р |
. |
(6.2) |
|
2Т р Т р 1 Wоу р |
||||
|
|
|
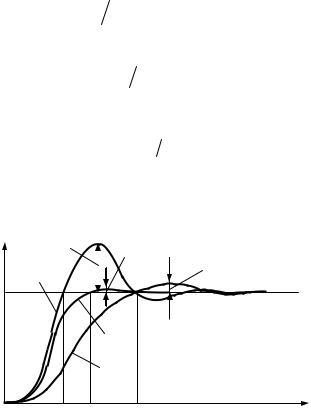
Переходный процесс в младшем контуре регулирования представлен кривой 1 на рис. 6.2.
|
56 % |
4,3 % |
2 |
|
8 % |
|
|
1
|
|
1 |
|
|
|
3 |
|
|
|
4,7 T |
|
0 |
3,1 T |
7,1 T |
t |
Рис. 6.2. Кривые оптимальных переходных процессов контуров регулирования СУИМ
Время регулирования младшего контура составляет около
8T , в остальных контурах при той же настройке оно будет как минимум в 2i–1 раз больше, i = 2, …, n.
179

6.2.2. Симметричный оптимум
При настройке контуров регулирования многоконтурной СУИМ на симметричный оптимум (СО) их передаточные функции представляют в виде оптимальных звеньев третьего порядка:
Wз р 4T p 1  8T 2 p2 T p 1 4T p 1 Koc .
8T 2 p2 T p 1 4T p 1 Koc .
Передаточные функции разомкнутого контура регулирования, настроенного на СО, и контурного регулятора получают умножением формул (6.1) и (6.2) на изодромное звено:
Wp р |
4Т р |
1 |
, |
|
|
|
4Т |
р |
|
||
|
|
|
|
||
т.е. в виде |
|
|
|
|
|
Wp р 4T p 1 |
8T 2 p2 T p 1 ; |
(6.3) |
|||
Wpег р |
4Т р 1 |
Woc |
. |
||
8T 2 p2 |
T p 1 Woy р |
||||
|
|
||||
Такая настройка контуров регулирования обеспечивает астатизм первого порядка по задающим воздействиям (теоретически нулевую установившуюся ошибку регулирования выходной координаты). Однако отработка скачкообразных задающих воздействий сопровождается высоким перерегулированием выходной координаты контура, достигающим 56 % (кривая 2 на рис. 6.2). Для снижения перерегулирования на вход замкнутого контура регулирования устанавливают апериодическое звено (предшествующий фильтр первого порядка с постоянной времени 4Т ). Переходный
процесс в СУИМ с предшествующим фильтром первого порядка представлен кривой 3 на рис. 6.2. Время регулирования для реакций 2 и 3 составляет около 15Т .
180