

Системы управления исполнительными механизмами
..pdfПриведем векторно-матричное описание ДПТ как объекта регулирования по цепи якоря, т.е. будем полагать, что напряжение возбуждения Uв = const, а магнитный поток Ф = Фн.
Воспользуемся векторно-матричной моделью [12, 13, 16] линейных САУ в виде
Х t AХ t BU t CF t , |
(4.12) |
где Х t , U t , F t – векторы соответственно состояния, управления и возмущения САУ;
X t x1 t x2 t ... xn t , U t u1 t u2 t ...um t ,
F t f1 t f2 t ... fd t ,
«′» – символ транспонирования; А, В, С – стационарные матрицы соответственно состояния, управления и возмущения,
a11 |
a12 |
... a1n |
|
b11 |
b12 |
... b1m |
|
c11 |
c12 |
... c1d |
|
||||
a |
a |
|
... a |
|
b |
b |
... b |
|
c |
c |
... c |
|
|||
А |
21 |
|
22 |
2n |
|
, B |
21 22 |
2m |
|
, C |
21 22 |
2d |
. |
||
|
... ... |
... ... |
|
|
... ... |
... ... |
|
|
... ... |
... ... |
|
||||
|
|
|
|
|
|
||||||||||
an1 an2 |
... ann |
bn1 |
bn2 |
... anm |
cn1 |
cn2 |
... cnd |
||||||||
Зададимся векторами состояния, управления и возмущения |
|||||||||||||||
в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X t x |
t x |
t i |
t t U t u |
t U |
я |
t ; |
|
||||
|
1 |
2 |
|
|
я |
|
1 |
|
|
(4.13) |
|
|
|
|
F t f1 t Мс t , |
|
|
|
|
|
|||
По уравнениям (4.10)–(4.13) найдем матрицы состояния, управления и возмущения:
АТ1э
CмФ
Jд
|
СеФ |
|
|
1 |
|
0 |
|
|
||||
Т |
R |
|
|
|
||||||||
|
|
Т |
R |
|
; С |
|
1 |
. |
||||
|
|
э э ; В |
|
|||||||||
|
0 |
|
|
|
э э |
|
|
|
|
|
||
|
|
|
|
|
J |
|
|
|||||
|
|
|
|
|
|
0 |
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
101
Бесколлекторные двигатели постоянного тока. Бесколлек-
торные двигателя постоянного тока (БДПТ) с возбуждением от постоянных магнитов (brush-less direct current motor with permanent magnets) часто еще называют вентильными двигателями (ВД). При контроле и преобразовании координаты положения ИМ их приня-
то называть сервоприводами постоянного тока.
Эта машина по своей конструкции ничем не отличается от классического синхронного двигателя с постоянными магнитами (СДПМ), изменен лишь принцип питания. Если СДПМ питается от источника переменного тока или напряжения, как правило, формируемого при помощи ШИМ, то ВД – трапецеидальным напряжением, питающим соответствующие фазы двигателя и переключаемым по мере поворота ротора.
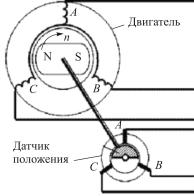
Являются приводами ЭИМ с переменной скоростью. Функ-
циональная схема электродвигателя приведена на рис. 4.7.
|
Представленный БДПТ со- |
||||
|
стоит из статора с трехфазной |
||||
|
обмоткой, соединенной в звез- |
||||
|
ду, и |
возбужденного |
ротора |
||
|
в виде |
постоянного |
магнита, |
||
|
а также датчика положения ро- |
||||
|
тора, выполненного в одном |
||||
|
корпусе с двигателем. Датчик |
||||
|
положения |
ротора |
выполнен |
||
|
с одним |
и тремя чувствитель- |
|||
|
ными элементами. Число чув- |
||||
Рис. 4.7. Функциональная |
ствительных |
элементов |
равно |
||
схема БДПТ |
числу обмоток статора. |
Датчик |
|||
|
положения |
ротора |
предназна- |
||
чен для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора.
Управление двигателем основано на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от
102
положения ротора. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока.
Бесколлекторный двигатель объединяет в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Основными достоинствами вентильных двигателей являются следующие:
–высокие быстродействие и точность позиционирования;
–широкий диапазон изменения частоты вращения;
–большая перегрузочная способность по моменту;
–большой срок службы, высокая надежность и повышенный ресурсработыза счетотсутствия скользящих электрических контактов;
–низкий перегрев электродвигателя при работе в режимах
свозможными перегрузками;
–высокая надежность работы, поскольку отсутствует щеточный узел;
–большой ресурс электродвигателя ограничен в основном только ресурсом подшипников;
–линейность регулировочной характеристики и меньший уровень электромагнитного шума по сравнению с коллекторными двигателями постоянного тока;
–применение в конструкции электродвигателя балансировочных колец потенциально может обеспечить стабильность работы при очень высоких скоростях вращения (десятки тысяч оборотов в минуту).
–отсутствие искрообразующих элементов и, как следствие, высокая взрывобезопасность делают бесколлекторные двигатели идеальным силовым элементом в запорном оборудовании нефте- и газопроводов.
Бесколлекторные двигатели не имеют недостатков, присущих асинхронным двигателям (потребление реактивной мощности, потери в роторе) и синхронным двигателям (пульсация частоты вращения, выпадение из синхронизма). В отличие от шаговых двигателей БДПТ не требует сложных схем управления.
103
Как и у коллекторных двигателей, момент бесколлекторных двигателей прямо пропорционален току, а скорость зависит от напряжения питания и нагружающего момента.
СУИМ на основе БДПТ находят широкое применение в робототехнике, поскольку наличие встроенного датчика угла поворота позволяет создавать обратную связь по положению рабочих органов и делает бесколлекторный двигатель удобным при построении систем автоматического управления.
БДПТ на российском рынке представлены несколькими сериями, в частности сериями FL42BLS (питание напряжением
~24 В), FL57BL(S) (питание напряжением ~36 В), FL86BLS (пита-
ние напряжением ~48 В) мощностью от 26 до 660 Вт и скоростью вращения 3–4 тыс. об/мин. Серии FL57BL-JB и FL86BLS-JB име-
ют встроенный редуктор с коэффициентом редукции от 20 до 1333, некоторые серии имеют встроенные блоки управления (драйверы), формирующие управляющие сигналы «разрешение», «направление» и «торможение».
На российский рынок БДПТ поставляются НПФ Stepmotor, НПФ «Электропривод», НПО «Атом» и др.
В табл. 4.1 в качестве примера приведены характеристики бесколлекторных электродвигателей серии FL42BL.
Таблица 4.1 Характеристики бесколлекторных электродвигателей FL42BL
Характеристики |
FL42BLS01 |
FL42BLS02 |
FL42BLS03 |
FL42BLS04 |
|
Напряжение пита- |
|
24 |
|
||
ния, В |
|
|
|||
|
|
|
|
||
Максимальный по- |
5,4 |
10,6 |
15,5 |
20,0 |
|
требляемый ток, А |
|||||
|
|
|
|
||
Мощность на вы- |
26,0 |
52,5 |
77,5 |
105,0 |
|
ходном валу, Вт |
|||||
|
|
|
|
||
Номинальная ско- |
|
4000 |
|
||
рость, об/мин |
|
|
|||
|
|
|
|
||
Номинальныйкру- |
0,62 |
1,25 |
1,85 |
2,5 |
|
тящиймомент, кг·см |
|||||
|
|
|
|
||
104 |
|
|
|
|
|

Окончание табл. 4.1
Характеристики |
|
FL42BLS01 |
FL42BLS02 |
FL42BLS03 |
FL42BLS04 |
|||
Максимальный кру- |
1,9 |
|
3,8 |
5,6 |
7,5 |
|||
тящий момент, кг·см |
|
|||||||
|
|
|
|
|
||||
Сопротивление меж- |
1,0 |
|
0,8 |
0,55 |
0,28 |
|||
ду линиями, Ом |
|
|
||||||
|
|
|
|
|
|
|||
Индуктивность меж- |
2,6 |
|
1,2 |
0,8 |
0,54 |
|||
ду линиями, мГн |
|
|
||||||
|
|
|
|
|
|
|||
ЭДС обратной связи, |
3,66 |
|
3,72 |
3,76 |
3,94 |
|||
В/1000 об.·мин |
|
|
||||||
|
|
|
|
|
|
|||
Момент инерции |
|
24 |
|
48 |
72 |
96 |
||
ротора, г·см2 |
|
|
||||||
Длина L, мм |
|
41 |
|
61 |
81 |
100 |
||
Источник питания |
|
H150S24 |
H300S24 |
H1000S24 |
H1000S24 |
|||
Внешний вид бесколлекторного электродвигателя FL42BL |
||||||||
приведен на рис. 4.8. |
|
|
|
|
||||
Датчик положения ротора вы- |
|
|
|
|||||
полнен на основе датчиков Холла. |
|
|
|
|||||
В табл. 4.2 |
приведено назначение |
|
|
|
||||
выводовкабеля БДПТ (см. рис. 4.8). |
|
|
|
|||||
При |
математическом описа- |
|
|
|
||||
нии БДПТ примем во внимание |
|
|
|
|||||
следующее: |
|
|
|
|
|
|
||
– процессами коммутации си- |
Рис. 4.8. Внешний вид БДПТ |
|||||||
ловых обмоток |
якоря, располо- |
|||||||
|
FL42BL |
|||||||
женных на неподвижном статоре, |
|
|||||||
|
|
|
||||||
можно пренебречь, поскольку переключение осуществляется полностью управляемыми бесконтактными ключами;
–быстродействие БДПТ много выше, чем быстродействие ИМ (быстродействие изменения положения РО);
–быстродействие БДПТ много выше, чем быстродействие изменения технологических координат СУИМ (температуры, давления, расхода, уровня и др.);
–механическая характеристика двигателя жесткая, во многом похожа на характеристику коллекторного ДПТ.
105
|
|
Таблица 4.2 |
|
|
Назначение выводов кабеля |
||
|
|
|
|
Цвет кабеля |
Обозначение |
Назначение |
|
|
вывода |
|
|
Красный |
Вывод |
Питание датчика Холла |
|
Синий |
Холл A |
Фазы датчика Холла |
|
Зеленый |
Холл B |
||
Белый |
Холл C |
|
|
Черный |
GND |
Заземление датчика Холла |
|
Желтый |
Фаза U |
Фазы двигателя (обмотки статора соединены |
|
Красный |
Фаза V |
||
|
|
треугольником) |
|
Черный |
Фаза W |
||
|
|||
С учетом изложенного математическую модель привода можно рассматривать безынерционной пропорциональной, т.е.
передаточная функция БДПТ имеет вид
W |
р |
Y p |
|
p |
K |
|
, |
X p |
Uп p |
|
|||||
БДПТ |
|
|
|
БДПТ |
|
где ω(р) – скорость вращения электродвигателя, рад/с; Uп(р) – среднее значение напряжения питания обмоток, В; KБДПТ – коэффициент передачи БДПТ, рад/В·с.
Асинхронные двигатели. Асинхронные двигатели относятся к двигателям переменного тока, принимающим главенствующее участие в управлении технологическими процессами и производственными установками (более 70 % всех ЭИМ оснащены именно ими). Различают:
–асинхронные двигатели с короткозамкнутым ротором (АДКР), питающиеся от трехфазной сети переменного тока
(~220 В и более);
–асинхронные двигатели с фазным ротором (АДФР), питающиеся от трехфазной сети переменного тока (~220 В и более);
–асинхронные двигатели с короткозамкнутым ротором и дополнительной пусковой обмоткой на статоре, питающиеся от однофазной сети переменного тока (~220 В и более).
106

Функциональные схемы асинхронных двигателей ЭИМ приведены на рис. 4.9.
~U1 |
~U1 |
|
|
~U1 |
|
|
|
|
|
|
C |
||
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
M |
|
|
M |
|
|
П |
|
|
|
|
M |
||
ω |
|
|
|
ω |
|
|
|
|
|
|
ω |
||
Mc |
|
|
|
|
|
|
|
Mc |
|
|
|
Mc |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
а |
б |
|
|
|
|
в |
Рис. 4.9. Функциональные схемы асинхронных двигателей: а – АДКР; б – АДФР; в – АДКР с однофазным питанием; ~U1 – переменное напряжение статорной обмотки (трехили однофазное); M – вращающий момент; Mc – момент сопротивления на валу двигателя; ω – скорость вращения двигателя; Р – рабочая обмотка; П – пусковая обмотка; С – емкость фазосдвигающего элемента (подбирают таким образом, чтобы
токи в рабочей и пусковой обмотках различались по фазе на 90°)
Эти электродвигатели работают как в системах постоянной, так и в системах переменной скорости ИМ.
Скорость n2 вращения ротора асинхронной машины отстает от скорости n1 поля статора и может быть определена по формуле
[17–19]
n |
n |
1 S |
60 f1 |
1 S , |
(4.14) |
|
|||||
2 |
1 |
|
P |
|
|
|
|
|
|
||
где f1 – частота питающего напряжения, т.е. частота вращения поля статора (Гц), f1 1  2 , ω1 – угловая частота поля статора (рад/с); P – число пар полюсов статора; S – относительное скольжение поля ротора, S n1 n2
2 , ω1 – угловая частота поля статора (рад/с); P – число пар полюсов статора; S – относительное скольжение поля ротора, S n1 n2  n1.
n1.
Из формулы (4.14) видно, что скорость вращения асинхронного двигателя можно менять тремя способами:
107
–изменением частоты f1 питающего напряжения;
–изменением числа полюсов двигателя; для этого в пазы статора закладывают обмотку, которую можно переключать на различное число полюсов;
– изменением скольжения. Этот способ можно применить
васинхронных двигателях с фазным ротором, для этого в цепь ротора включают регулировочный реостат.
Асинхронные двигатели с короткозамкнутым ротором (АДКР) имеют простую конструкцию и надежны в эксплуатации вследствие отсутствия щеточного контакта. Недостатком АДКР является трудность регулирования их частоты вращения, поскольку в энергетическом плане необходимо одновременно с изменением частоты изменять и напряжение питающей сети.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, т.е. два любых линейных провода, подходящих к обмотке статора двигателя.
Всилу природы электромагнитных процессов, обеспечивающих взаимодействие статорной и роторной обмоток, и нелинейности преобразования подводимой электрической энергии в механическую энергию вращения ротора электродвигатели описываются нелинейными векторными дифференциальными уравнениями [17].
Можно много говорить о допущениях, позволяющих или не позволяющих свести модели электродвигателей переменного тока как объектов управления к тем или иным моделям, но применительно к учебной дисциплине «СУИМ» имеет смысл учесть место ЭИМ в структуре СУИМ и специфику работы электродвигателей
вразличных системах постоянной и переменной скорости. Рассмотрим основные аспекты применения АДКР.
Асинхронные трехфазные общепромышленные электродви-
гатели с короткозамкнутым ротором применяются во всех отраслях промышленности, в электроприводах различных устройств, механизмов и машин. Работают как в системах постоянной, так и в системах переменной скорости ИМ.
108

Асинхронные двигатели общепромышленного назначения изготавливаются в основном (базовом) и модифицированных исполнениях. Основное (базовое) исполнение – двигатель монтажного исполнения IM1001 (1081), климатическое исполнение У3, для режима работы S1, с типовыми техническими характеристиками, соответствующими требованиям стандартов. Внешний вид электродвигателя приведен на рис. 4.10.
В отечественной промышленности выпускаются трехфазные АДКР общепромышленного назначения серий АИР, АИРМ, 5А, 5АМ, 5АМХ, А, АИ, 5АИ, АД, АДМ, АИС, 6А. Модифицированное исполнение – двигатель, изготовленный на основе узлов основных (базовых) двигателей с необходимыми конструктивными отличиями по способу монтажа, степени защиты, климатическому исполнению и другими отличиями. Двигатели специального назначения – двигатели, предназначенные для узкоспециализированного применения: лифтов, транспорта, талей и т.д.
При использовании таких двигателей в ЭИМ постоянной скорости реализуют непосредственное подключение статорной обмотки к сети с помощью контактного или бесконтактного (симисторного) реверсивного пускателя. В этом случае пренебрегают как электромагнитными, так и электромеханическими процессами в двигателе и модель двигателя в осях «частота пи-
тающего напряжения – частота вращения ротора» представляют в виде масштабирующего звена
W |
р |
Y p |
|
p |
K |
|
. |
(4.15) |
|
X p |
|
p |
|
||||||
АДКР |
|
|
|
АДКР |
|
|
|||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
109 |
При использовании таких двигателей в ЭИМ переменной ско-
рости реализуют либо фазовое, либо частотное управление. В таких ЭИМ доминируют трехфазные АДКР. При этом применяют различные аппроксимированные модели электродвигателей.
АД представляет собой систему магнитно-связанных обмоток, расположенных на статоре и роторе. При вращении ротора взаимное положение обмоток статора и ротора непрерывно меняется, что приводит к изменению взаимной индуктивности и, соответственно, потокосцеплений статора и ротора. Математическая модель АД при этом становится достаточно сложной [17–19] и требует обоснованного упрощения.
Общепринятыми являются следующие допущения:
–воздушный зазор равномерен;
–насыщение магнитной цепи отсутствует;
–намагничивающие силы обмоток распределены синусоидально вдоль окружности воздушного зазора;
–обмотки статора и ротора строго симметричны, и их оси сдвинуты в пространстве на 120°;
–потери на гистерезис и вихревые токи отсутствуют.
Часто пренебрегают электромагнитными процессами в двигателе, полагая, что в зоне малых отклонений координат электродвигатель представляет собой линейное апериодическое звено первого порядка:
W |
р |
Y p |
|
p |
|
KАДКР |
, |
(4.16) |
|
|
|
||||||
АДКР |
|
X p |
Uп p |
|
ТАД р 1 |
|
||
|
|
|
|
|||||
где KАДКР – коэффициент передачи АДКР, определяемый по формуле KАДКР н  U1н ; ωн, U1н – номинальные значения соответст-
U1н ; ωн, U1н – номинальные значения соответст-
венно угловой скорости и напряжения питания; ТАД – постоянная времени электродвигателя, снимаемая по апериодической кривой разгона двигателя за время разгона tр: ТАД = tp/4.
В тех случаях, когда нельзя пренебречь влиянием электромагнитных процессов на динамику электродвигателя, модель электродвигателя как элемента СУИМ с частотным или фазовым
110