

Системы управления исполнительными механизмами
..pdf8. СИСТЕМЫ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ЭИМ
Системы регулирования положения исполнительных органов машин и механизмов имеют широчайший диапазон применения. Они применяются для стабилизации положения различных платформ в условиях качки их оснований (системы стабилизации положения), для позиционирования схватов манипуляторов промышленных роботов, позиционирования инструментов коорди- натно-расточных станков (позиционные программные системы регулирования положения), для механической обработки поверхности различных изделий техники токарно-фрезерными станками (контурные программные системы регулирования положения), в качестве систем наведения антенн, оптических радиотелескопов, ракет (следящие системы управления положением) и т.п. Диапазон значений мощности исполнительных двигателей САР положения очень широк – от десятков ватт до единиц мегаватт. Маломощные электроприводы положения ИМ часто называют сервоприводами.
8.1. Режимы перемещения рабочих органов
Системы стабилизации положения, контурные и следящие системы функционируют, как правило, в режиме малых отклонений координат, т.е. когда координаты не достигают предельно допустимых значений. Применительно к позиционным системам различают три режима их функционирования и, соответственно, три режима перемещения рабочих органов:
–режим малых перемещений;
–режим средних перемещений;
–режим больших перемещений.
При малых перемещениях скорость двигателя ИМ не достигает рабочей максимальной скорости ( < max), ускорение не достигает максимально допустимого значения max , d / dt .
Поскольку ускорение пропорционально динамическому моменту или току, они не достигают предельно допустимых значений.
211
Врежиме средних перемещений скорость двигателя не достигает рабочей максимальной скорости, но ускорение двигателя (динамические момент, ток) может достигать предельного значения
max .
Врежиме больших перемещений и скорость, и ускорение
двигателя |
могут достигать максимального значения ( max, |
max ). |
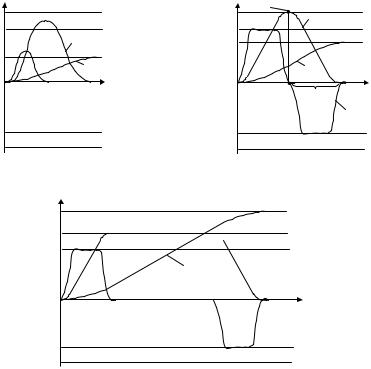
Графики перемещения, скорости и ускорения рабочего |
органа (двигателя ЭИМ) для этих режимов приведены на рис. 8.1.
max
εmax
з
0
–εmax
– max
t
 ε
ε
а
з
max
εmax
0
–εmax
– max
max |
нт |
|
|
|
|
||
εmax |
|
||
|
|
||
з |
|
|
|
|
|
t |
|
0 |
tнт t |
||
|
|||
|
|
ε
–εmax
– max
б


t
 ε
ε
в
Рис. 8.1. Перемещение, скорость и ускорение рабочего органа в позиционной СУИМ: а – режим малых перемещений; б – режим средних перемещений; в – режим больших перемещений
212
Заметим, что время позиционирования исполнительного органа (ЭИМ) в режиме малых перемещений является неизменным, не зависящим от величины перемещения (см. рис. 8.1, а). САР положения при этом остается линейной.
Врежимах средних и больших перемещений время позиционирования зависит от величины перемещения и САР становится нелинейной (см. рис. 8.1, б, в).
САР положения призвана обеспечить оптимальное автоматическое перемещение исполнительного органа рабочей машины из некоторой начальной позиции в некоторую конечную. В позиционных САР траектория движения исполнительного органа не имеет существенного значения и в качестве датчиков положения часто
суспехом могут использоваться дискретные датчики типа конечных выключателей. Напротив, в следящих САР, контурных СЧПУ требуется непрерывный контроль отклонения положения от заданного значения. Автоматическое регулирование положения в этом случае реализуют с применением аналоговых (непрерывных) или дискретных (цифровых) САР положения с подчиненными контурами регулирования координат электроприводов.
Вкачестве датчиков положения используются сельсины, вращающиеся трансформаторы, индуктосины, многооборотные прецизионные потенциометры, импульсные, цифровые датчики
идр. В ряде случаев для повышения точности работы САР контроль положения осуществляют датчиками грубого и точного отсчета (при больших отклонениях положения от заданного значения работает система грубого отсчета, в диапазоне малых рассогласований – система точного отсчета).
Ниже будут рассмотрены некоторые САР положения, функционирующие в режимах малых, средних и больших перемещений РО ИМ.
8.2. САР положения с линейным регулятором
Функциональная схема одной из САР положения, функционирующих в режиме малых перемещений, приведена на рис. 8.2. САР содержит двигатель постоянного тока ДПТ с независимым возбуж-
213

дением, управляемый по цепи якоря от тиристорного преобразователя ТП, редуктор Р, регуляторы и датчики тока, скорости и положения (РТ, РС, РП, ДТ, ДС, СП), фазочувствительный выпрямитель ФЧВ. В качестве датчика скорости используется тахогенератор постоянного или переменного тока (на схеме изображен тахогенератор постоянного тока с возбуждением от постоянных магнитов). В качестве датчика положения применен сельсин-приемник (СП), а в качестве задатчика положения – сельсин-датчик (СД). Сельсины работают в трансформаторном режиме (их обмотки возбуждения не соединены друг с другом, и синхронизирующий момент не возникает). При возникновении рассогласования = з – в положении роторов сельсинов, т.е. при возникновении ошибки регулирования положения в выходной однофазной обмотке сельси- на-приемника, наводится ЭДС U = U maxsin .
|
|
|
|
|
|
|
|
U |
|
|
|
||
з |
СП |
Uзс |
Uзт |
Uут |
||
|
||||||
|
Uп РП Uс |
|
|
|||
|
|
ФЧВ |
РС Uт |
РТ |
||
СД |
|
|
|
|
ТП |
|
|
|
|
|
|||
|
|
|
|
|
ДТ |
|
|
Р |
|
|
ДС |
ДПТ |
|
|
|
|
|
|
Рис. 8.2. Функциональная схема САР положения
При малых рассогласованиях в угловых положениях (<3 ) сельсинов величина наведенной ЭДС будет практически пропорциональна величине рассогласования, т.е.
U = K ,
где K – коэффициент передачи сельсина-приемника в линейной зоне измерения углового положения, K = U лин/ лин; U лин,
214

лин – отклонения координат в линейной зоне измерения углового положения.
Фазочувствительный выпрямитель ФЧВ позволяет выявить знак (фазу) рассогласования, формируя напряжение, пропорциональное ошибке регулирования положения, т.е.
Uп = Kфчв U = KфчвK ,
где Kфчв – коэффициент передачи ФЧВ.
Замкнутые контуры регулирования тока якоря и скорости двигателя (ЗКРТ и ЗКРС) настраиваются так же, как и в системе регулирования скорости ТП – Д: ЗКРТ – на технический оптимум (ТО), ЗКРС – на технический или симметричный оптимум (СО). При этом регулятор тока якоря имеет ПИ-структуру, регулятор скорости – П- или ПИ-структуры.
В зоне малых перемещений контур регулирования положения настраивают, как правило, на технический (ТО) или апериодический (АО) оптимум. Структурная схема замкнутого контура регулирования положения приведена на рис. 8.3. Передаточную функцию ЗКРС аппроксимируют звеном первого порядка:
W |
Р |
1 Kc |
|
|
1 Kc |
|
|
1 Kc |
, |
2T c P T c P 1 1 |
|
|
|||||||
зкрс |
|
|
2T c P 1 |
|
Tc P 1 |
||||
|
|
|
|
||||||
где Tc – постоянная времени ЗКРС.
Uзп |
|
Uп |
|
|
Uзс |
|
|
|
|
|
|
|
|
|
|
||||||||||
Wрп(P) |
|
Wзкрс(P) |
K /P |
|||||||||
|
– |
|
|
|
|
|
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Uп |
Фильтры |
|
|
|
|
|
|
|||
|
|
|
Kп |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.3. Структурная схема контура регулирования положения
Коэффициент передачи силового редуктора K определяется как отношение выходной скорости редуктора к входной. Коэффициент передачи Kп цепи обратной связи по положению представляет собой отношение
215
Kп = Uп лин / лин.
При использовании в качестве датчика положения сельсина или вращающегося трансформатора Kп рассчитывают по формуле
Kп = KфчвK = KфчвU лин / лин.
Эквивалентная малая постоянная времени замкнутого контура регулирования положения (ЗКРП) представляет собой сумму малых постоянных времени ЗКРС и фильтров на выходах регулятора положения (РП) и датчика положения (на выходе ФЧВ при использовании сельсина в качестве датчика положения) – см. рис. 8.3:
T п = Tс + Tфрп + Tфдп.
Применяя типовую методику синтеза к контуру, настраиваемому на АО, получим передаточную функциюрегулятораположения:
Wрп Р |
Kc |
Kрп. |
(8.1) |
|
4T пK Kп |
||||
|
|
|
8.3. САР положения с нелинейным регулятором
Режим средних и больших перемещений характеризуется вы-
ходом как минимум ускорения двигателя на режим ограничений,
т.е. max = (d /dt)max = (Mmax + Mc)/Jпр (полагаем статическую нагрузку на валу электродвигателя постоянной). В этом случае СУ-
ИМ становится нелинейной. Следовательно, для синтеза регулятора положения теория линейных систем неприменима, а сам регулятор не может быть представлен передаточной функцией.
Установим соотношение между скоростью начала торможения нт и приращением перемещения т в режиме средних перемещений (см. рис. 8.1, б):
tнт |
t |
|
K Jпр |
0 |
2 |
2 |
|
|
т K |
|
dt |
d |
K Jпр нт |
|
K нт |
, |
|
|
2 Мmax Mc |
|
||||||
t |
нт |
|
Мmax Mc |
|
2 max |
|||
|
|
|
нт |
|
|
|
|
|
где t нт, t – время начала торможения и время торможения.
216

Отображение полученного выражения на плоскости координат нт и т называется фазовым портретом (рис. 8.4).
Относительно конкретной точки А фазового портрета (см. рис. 8.4) найдем выражение для коэффициента передачи регулятора положения:
|
|
|
Uрп |
|
K |
|
|
2K |
|
max |
|
|
|||||
K |
рп |
|
|
|
|
c |
нт |
|
|
|
c |
|
. |
(8.2) |
|||
U |
|
|
|
K |
|
K |
|
||||||||||
|
|
п |
|
K |
|
т |
|
п |
|
|
|||||||
|
|
|
|
|
п |
|
|
|
|
|
|
нт |
|
||||
Как видим, коэффициент передачи РП в режиме средних перемещений зависит от скорости начала торможения нт и представляет собой нелинейное звено. При малых перемещениях коэффициент передачи звена стремится к бесконечности, что сделает позиционную САР неустойчивой. Для обеспечения постоянства Kрп и устойчивости системы во всем диапазоне средних перемещений принимают нт = max, т.е.
Ант
т
0
Рис. 8.4. Фазовый портрет позиционной САР для режима средних перемещений
Kрп 2Kc max .
KпK max
Заметим, что max = max / tmin. Сравнивая выражения для Kрп в режимах малых и средних перемещений, можно убедиться, что
время разгона (торможения) до максимальной скорости при на-
217
стройке контура положения на АО tmin 8T п, а следовательно, необходимо учитывать фактор ограничения максимального ускорения max электропривода при аппроксимации регулятора положения линейным пропорциональным звеном.
При такой настройке РП система остается линейной в режимах малых и средних перемещений, однако оптимальное по быстродействию (производительности) позиционирование возможно только при нт = max, т.е. лишь в одной точке фазового портрета. При меньших перемещениях позиционирование будет осуществляться с дотягиванием, при больших – с перерегулированием.
Очевидно, что оптимальное позиционирование во всех трех режимах перемещений требует применения нелинейного регулятора положения.
Сделаем допущение, что статическая ошибка позиционирования в ЗКРП отсутствует и ЗКРС имеет достаточное быстродействие. В этом случае выходное напряжение регулятора положения для момента времени, соответствующего началу торможения, можно представить в виде
Uрп = Kрп Uп = Kc нт.
Подставляя в это соотношение выражение (8.2) для Kрп в режиме средних перемещений, получим
|
Uр2п |
2K 2 |
|
max |
|
|
||
|
|
c |
|
Uп |
|
|||
|
|
|
|
|
|
|||
|
|
|
KпK |
|
||||
или |
Uрп Kc |
2 max |
Uп Kpп |
Uп , |
||||
KпK |
||||||||
где K рп – постоянный коэффициент передачи параболического ре-
|
2 max |
|
гулятора положения, Kрп Kc |
|
. |
KпK |
||
218

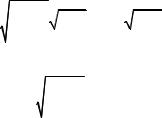
Таким образом, оптимальный нелинейный регулятор положения для режима средних перемещений представляет собой нелинейность типа «корень квадратный», получивший название «параболический регулятор».
Режим больших перемещений характеризуется позиционированием с предельно допустимой скоростью max, что достигается ограничением выходного сигнала регулятора скорости на уровне Uрп = Kc max. Функциональная зависимость «вход-выход» нелинейного регулятора, обеспечивающего оптимальное качество регулирования положения рабочего органа при позиционировании во всех трех режимах, приведена на рис. 8.5.
В режиме средних перемещений (РСП) характеристика РП имеет нелинейность типа «корень квадратный», в режиме больших перемещений (РБП) – нелинейность типа «насыщение» (на уровне Kc max), в режиме малых перемещений (РМП) характеристика РП имеет линейную зависимость с коэффициентом передачи, обеспечивающим оптимальную настройку ЗКРП на АО в режиме малых
перемещений, т.е. Kрп |
Kc |
|
|
. |
||
4T |
K |
|
K |
|
||
|
п |
|
|
|
п |
|
Uрп
Kc max
|
0 |
|
Uп |
РБП |
РСП |
РСП |
РБП |
|
|
РМП |
|
–Kc max
Рис. 8.5. Характеристика «вход-выход» параболического регулятора положения
219

Нелинейная характеристика такого РП реализуется включением диодно-резистивной матрицы в обратную связь операционного усилителя или программно в микропроцессорных СУИМ.
8.4. Инвариантные и квазиинвариантные следящие СУИМ
Рассмотрим структурную схему следящей системы с подчиненным контуром регулирования скорости электропривода
(рис. 8.6).
|
|
|
|
|
|
|
|
M с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wмс(P) |
|
|
|
|
з |
|
|
|
Uп |
|
Uзс |
|
_ |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
+ |
|
|
|
|||||
_ |
Kп |
Wрп(P) |
Wзкрс(P) |
|
K / P |
|||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.6. Структурная схема следящей СУИМ с подчиненным контуром регулирования скорости
Воздействие статической нагрузки Mс на валу электропривода здесь приведено к выходу замкнутого контура регулирования скорости (ЗКРС).
Пусть ЗКРС настроен на ТО, т.е. применен П-регулятор скорости, а следовательно,
Wзкрс Р |
1 Kc |
. |
|
2T c P T c P 1 1 |
|||
|
|
Передаточная функция Wмс(P) в этом случае может быть получена из рассмотрения структурной схемы ЗКРС, приведенной на рис. 7.3, в которой
Wрс Р Kрс KрсTм .
2T c RэKдKс
Полагая Uзс = 0 и принимая во внимание, что Mc = ic / Kд, получим
220