

Системы управления исполнительными механизмами
..pdfZ0
Хвх |
Zвх |
|
|
Yвых |
|
|
|||
|
|
|
|
|
|
|
|
|
|
A1
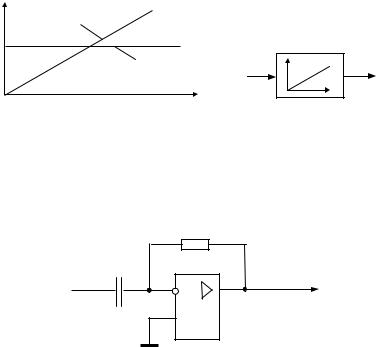
Рис. 4.17. Функциональная схема регулятора класса «вход-выход»
Математическую модель таких регуляторов чаще всего представляют либо в виде передаточной функции (структурной схемы), либо в виде дифференциальных уравнений (переходной функции). Входной сигнал представляет собой разность между задающим сигналом и сигналом обратной связи по регулируемой координате (сигнал ошибки регулирования). Обратная связь всегда отрицательна. У операционного усилителя задействован инверсный вход, а значит, выходной сигнал операционного усилителя всегда будет противоположен по знаку сигналу ошибки.
При математическом описании регуляторов применим сле-
дующую последовательность: принципиальная схема регулятора – передаточная функция – переходная характеристика – переходный процесс – изображение блок-схемы регулятора (функциональной схемы).
1. Пропорциональный регулятор (П-регулятор).
На рис. 4.18 приведена принципиальная электрическая схема простейшего регулятора класса «вход-выход» с пропорциональной структурой.
Обозначения на схеме:
A1 – операционный усилитель;
Rз, R0, Rос – значения активного сопротивления соответственно в цепях задания, собственной обратной связи операционного усилителя и обратной связи регулятора;
131

Хз – сигнал задания; Хос – сигнал обратной связи с датчика регулируемой коорди-
наты;
Yвых – выходной сигнал регулятора.
R0
Хз |
Rз |
|
Yвых |
|
Хос Rос
A1
Рис. 4.18. Принципиальная электрическая схема П-регулятора
Будем полагать, что на входе регулятора – сигнал ошибки регулирования Хвх, причем Хвх = Хз – Хос. При этом вместо двух резисторов Rз и Rос используется один – Rвх.
Передаточная функция регулятора
W p |
Yвых p |
|
Z0 p |
|
R0 |
Kp . |
Xвх p |
Zвх p |
|
||||
|
|
|
Rвх |
|||
Пропорциональный регулятор теоретически позволяет пропускать через себя сигналы всего спектра частот. В действительности его частотные свойства носят ограниченный характер, поскольку в области высоких частот коэффициент передачи Kр будет снижаться, а также появится фазовый сдвиг между Хвх и Yвых. Ограничение спектра пропускания частот осуществляется цепями внутренней или внешней коррекции операционных усилителей, и реальная полоса пропускания пропорциональных регуляторов ограничивается сотнями герц или единицами килогерц. Цепи коррекции операционных усилителей позволяют повысить помехозащищенность канала регулирования.
132

Временная переходная характеристика регулятора
Yвых(t) = KрХвх(t) = Kр·1(t).
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.19.
Функциональная схема пропорционального регулятора приведена на рис. 4.20.
|
Yвых(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
П-рег. |
||
1 |
Kр |
|
|
|
|
|||
Хвх(t) |
Хвх |
|
|
|
|
|
Yвых |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|||
0 |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.19. Переходный процесс |
Рис. 4.20. Функциональная |
||||||
|
в П-регуляторе |
схема П-регулятора |
||||||
2. Интегральный регулятор (И-регулятор).
Принципиальная схема регулятора приведена на рис. 4.21.
С0
Хвх |
Rвх |
|
|
|
Yвых |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1
Рис. 4.21. Принципиальная электрическая схема И-регулятора
Передаточная функция регулятора
W P |
Z0 P |
|
1/ C0 P |
|
1 |
|
|
1 |
, |
||||
Z |
|
P |
|
R C P |
Т |
|
Р |
||||||
|
вх |
|
R |
P |
|
|
и |
|
|||||
|
|
|
|
вх |
|
|
вх 0 |
|
|
|
|
||
где Tи – постоянная времени интегратора, Tи = RвхС0.
133
Переходная характеристика регулятора
Yвых(t) = Yвых(0) + [1/(RвхС0)]·1(t),
где Yвых(0) = 0.
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.22.
Функциональная схема интегрального регулятора приведена на рис. 4.23.
Yвых(t)
1
Хвх(t)
0
t
Рис. 4.22. Переходный процесс в И-регуляторе
И-рег.
Хвх 


 Yвых
Yвых
t
Рис. 4.23. Функциональная схема И-регулятора
3. Дифференциальный регулятор (Д-регулятор).
Принципиальная схема регулятора приведена на рис. 4.24.
|
|
R0 |
Xвх |
Свх |
Yвых |
|
A1
Рис. 4.24. Принципиальная электрическая схема Д-регулятора
Передаточная функция регулятора
W P |
Z0 P |
|
R0 |
R C P Т |
|
Р, |
Zвх P |
|
д |
||||
|
|
1/ CвхP |
0 вх |
|
||
|
|
|
|
|
где Tд – постоянная времени интегратора, Tд = R0Свх.
134

Переходная характеристика регулятора
Yвых(t) = Tд (t),
где (t) – дельта-функция Дирака.
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.25.
Следует отметить, что ограниченная полоса пропускания частот самих операционных усилителей не позволяет реализовать чистое (идеальное) дифференцирование. Кроме того, в силу низкой помехозащищенности дифференциальных регуляторов сложилась практика применения реальных дифференцирующих звеньев, и принципиальные схемы таких регуляторов несколько отличаются от приведенной на рис. 4.24.
1 |
|
|
|
|
|
|
Д-рег. |
|
|
|
Хвх |
|
|
|
|
Yвых |
|
|
Yвых(t) |
Хвх(t) |
|
|
|
|
||
|
|
|
|
|
|
|||
0 |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Рис. 4.25. Переходный процесс |
Рис. 4.26. Функциональная |
|||||||
|
в Д-регуляторе |
|
схема Д-регулятора |
|||||
Функциональная схема дифференциального регулятора приведена на рис. 4.26.
4. Пропорционально-интегральныйрегулятор(ПИ-регулятор).
Принципиальная схема регулятора приведена на рис. 4.27.
|
|
|
R0 |
|
|
|
|
|
С0 |
||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Хвх |
Rвх |
|
|
|
|
|
|
Yвых |
|||
|
|
|
|
|
|
||||||
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1
Рис. 4.27. Принципиальная электрическая схема ПИ-регулятора
135

Передаточная функция регулятора
W P |
Z0 P |
|
R0 1/ C0 P |
|
R0 |
|
1 |
K |
|
|
|
1 |
, |
||||
Z |
вх |
P |
R |
R |
R C P |
p |
Т |
и |
Р |
||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
вх |
|
вх |
|
вх 0 |
|
|
|
|
|
|
|||
где KР – коэффициент передачи регулятора, Kр = R0/Rвх; Tи – постоянная времени интегратора, Tи = RвхС0.
Переходная характеристика регулятора
Yвых(t) = Yвых(0) + [Kр + t/(RвхС0)]·1(t), Yвых(0) = 0.
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.28.
Функциональная схема пропорционально-интегрального регулятора приведена на рис. 4.29.
Yвых(t)
1 |
|
|
|
|
ПИ-рег. |
||
|
|
Хвх |
|
|
|
Yвых |
|
|
Хвх(t) |
|
|
|
|||
|
|
|
|
||||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
0 |
Kр |
t |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Рис. 4.28. Переходный процесс |
Рис. 4.29. Функциональная |
|||||
|
в ПИ-регуляторе |
схема ПИ-регулятора |
|||||
Передаточную функцию ПИ-регулятора часто представляют не в виде суммы двух слагаемых, а в виде так называемого изодромного звена:
W P TизP 1, TиP
где Tиз – постоянная времени изодромного звена, Tиз = R0C0, Tи – постоянная времени интегрирования регулятора, Tи = RвхC0.
ПИ-регулятор, включенный в структуру САУ, обеспечивает компенсацию одной большой постоянной времени объекта управления.
136

5. Пропорционально-дифференциальный регулятор (ПД-регу-
лятор). Принципиальная схемарегулятора приведена нарис. 4.30.
Rвх R0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Yвых |
Xвх |
Свх |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
||||||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1
Рис. 4.30. Принципиальная электрическая схема ПД-регулятора
Передаточная функция регулятора |
|
|
|
||||||
W P |
Z0 P |
|
|
R0 |
|
|
|||
Z |
вх |
P |
R / C P |
/ R |
1/ C P |
||||
|
|
|
|||||||
|
|
|
|
вх вх |
вх |
вх |
|
||
R0 R0CвхP Kp ТдР,
Rвх
где KР – коэффициент передачи регулятора, Kp = R0/Rвх; Tд – постоянная времени интегратора, Tд = R0Свх.
Переходная характеристика регулятора
Yвых(t) = Kр·1(t) + Tд (t),
где (t) – дельта-функция Дирака.
Переходный процесс в ПД-регуляторе будет иметь вид, изображенный на рис. 4.31, функциональная схема регулятора приведена на рис. 4.32.
|
|
Yвых(t) |
|
|
ПД-рег. |
||||||
1 |
|
|
|
Хвх |
|
|
|
|
|
Yвых |
|
|
|
|
|
|
|
|
|
||||
|
Хвх(t) |
|
|
|
|
|
|||||
|
t |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||
0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
||||||
Рис. 4.31. Переходный процесс |
Рис. 4.32. Функциональная |
||||||||||
|
|||||||||||
|
|
в ПД-регуляторе |
схема ПД-регулятора |
||||||||
|
|
|
|
|
137 |
||||||

6. Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор).
Принципиальная схема регулятора приведена на рис. 4.33.
|
|
Rвх |
R0 |
|
|
|
|
С0 |
||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xвх |
Свх |
|
|
|
|
|
|
|
|
|
|
|
|
Yвых |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1
Рис. 4.33. Принципиальная электрическая схема ПИД-регулятора
Передаточная функция регулятора |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
W P |
Z0 P |
|
|
R0 1/ C0 P |
|
|
|
|
|
|
|||||||
|
|
Z |
|
|
P |
|
|
1/ C P |
|
|
|||||||||
|
|
|
|
вх |
|
R / C P |
/ R |
|
|
|
|||||||||
|
|
|
|
|
|
|
вх |
вх |
вх |
|
|
вх |
|
|
|
|
|||
|
|
R0 |
Свх |
|
1/ R C P R С P K |
|
1/ Т |
|
Р Т |
|
Р, |
||||||||
|
|
|
p |
и |
д |
||||||||||||||
|
Rвх С0 |
|
|
вх |
0 |
0 вх |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где Kp – коэффициент передачи регулятора, Kр = R0/Rвх + Cвх/С0; Tи – постоянная времени интегрирования, Tи = RвхС0; Tд – постоянная времени дифференцирования, Tд = R0Свх.
Временная характеристика регулятора
Yвых(t) = Yвых(0) + Kр·1(t) + (1/TиP)·1(t)·t + Tд (t),
где (t) – дельта-функция Дирака, Yвых(0) = 0.
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.34, функциональная схема приведена на рис. 4.35.
По аналогии с ПИ-регулятором ММ ПИД-регулятора часто представляют в виде изодромного звена второго порядка:
W P Tиз1P 1 Tиз P 1 ,
TиP
138

где Тиз 1, Тиз 2 – постоянные времени изодромного звена; Тиз 1 = R0С0,
Тиз 2 = RвхСвх.
|
Yвых(t) |
|
ПИД-рег. |
||||
1 |
Хвх |
|
|
|
Yвых |
||
|
|
|
|
||||
Хвх(t) |
t |
|
|
|
|
||
0 |
|
|
|
|
|||
|
|
|
|
||||
Рис. 4.34. Переходный процесс |
Рис. 4.35. Функциональная |
||||||
|
|||||||
|
в ПИД-регуляторе |
схема ПИД-регулятора |
|||||
На практике часто применяются иные схемы ПД- и ПИДрегуляторов, обеспечивающие реальное дифференцирование ошибки регулирования и, соответственно, более высокую помехозащищенность системы.
Помимо рассмотренных регуляторов применяются также регуляторы класса «вход-выход» иных структур: ИПИ, И2П, ПДД и т.п.
ПИ-регулятор в компенсационных системах управления обеспечивает компенсацию одной большой постоянной времени объекта управления, а ПИД-регулятор – двух больших постоянных времени, обеспечивая тем самым форсирование динамических процессов и улучшение динамики СУИМ. Регуляторы, содержащие более одного интегратора, призваны обеспечить астатизм СУИМ при аддитивных воздействиях не только в виде ступенчатой функции времени, но и в виде временной функции более сложного вида. ПДД-регуляторы применяют в СУИМ интегрирующего типа.
Регуляторы включают, как правило, последовательно с объектом управления. Они призваны скорректировать динамику СУИМ с целью удовлетворения требований к ее статическим и динамическим показателям. При синтезе СУИМ вместо понятия «регулятор» часто применяют понятие «корректирующее устройство» («корректирующее звено»), включаемое последовательно с объек-
139
том управления или его частью, иногда – в обратной связи по регулируемой координате.
Наибольшее распространение в СУИМ нашли следующие корректирующие устройства, позволяющие варьировать полюсами и нулями итемсамымкорректировать динамику СУИМ[13, 14, 16]:
– реальное пропорционально-дифференцирующее звено первого порядка:
W p |
K p b |
, |
|
p a |
|||
ку |
|
||
|
|
где a и b – соответственно полюс и нуль передаточной функции, причем при |a| > |b| осуществляется коррекция системы с опережением по фазе, при |b| > |a| – коррекция системы с отставанием по фазе; проблема параметрического синтеза корректирующих устройств сводится к определению параметров K, a, b;
– реальное пропорционально-дифференцирующее звено второго и более высокого порядка:
|
|
m |
|
|
|
p |
K p bi |
|
|
W |
i 1 |
, |
||
n |
||||
ку |
|
|
||
|
|
p a j |
|
|
|
|
j 1 |
|
где aj, bi – соответственно полюса и нули корректирующего звена, выбором которых стремятся стабилизировать требуемые показатели качества скорректированной системы (m > 1, n > 1);
– апериодическое звено (фильтр) первого порядка:
W p |
1 |
, |
|
p a |
|||
ку |
|
||
|
|
применяемое для фильтрации сигналов измерительного тракта, а также в качестве предшествующего фильтра (фильтра на входе замкнутой системы управления) [17, 18].
140