

Актуальные проблемы повышения эффективности и безопасности эксплуат
..pdfРезультаты измерении ускорения скипа в трех направлениях: вертикальном, лобовым и боковым в горизонтальной плоскости привязаны к положению скипа в шахтном стволе.
Состояние системы «подъемный сосуд – жесткая армировка» определяется воздействием группы факторов. Основные из них – динамические нагрузки от движущихся скипов, постоянное наблюдение за развитием процесса. Для каждого направления скипа могут быть установлены допустимые пределы ускорения, за пределами которых выдается предупреждающий сигнал, и фиксируется в архиве сообщений.
Система непрерывного контроля осуществляет:
– вывод информации на экране рабочей |
|
|
станции в виде графиков и текущих значений |
|
|
ускорении в режиме реального времени; |
|
|
– хранение зарегистрированной информа- |
|
|
ции в энергонезависимой памяти рабочей стан- |
|
|
ции, а так же обеспечивает возможность про- |
|
|
смотра архива на экране рабочей станции. Име- |
|
|
ется возможность переноса информации на |
|
|
персональный компьютер с помощью USB флэш |
|
|
диска. |
|
|
Анализ результатов непрерывного кон- |
|
|
троля. Система непрерывного контроля позво- |
|
|
ляет выявлять наиболее проблемные участки |
|
|
шахтного ствола. На рис. 2 приведены графики |
Рис. 1. Монитор компьютера |
|
ускорения подъемного сосуда при прохождении |
||
системы непрерывного |
||
искривленного профиля проводника. Отклоне- |
||
контроля |
||
ние шахтных проводников от вертикали, в лобо- |
|
|
вом направлении на 20 мм яруса -104. способст- |
|
вуют появлению динамической нагрузки на армировку со стороны подъемного сосуда.
Из анализа графиков на рис. 2. cледует, что величина максимального значения ускорения зафиксировано системой составляет 6 м/с2, при скорости движения подъемного сосуда 9,3 м/с, максимальная амплитуда ускорения подъемного сосуда располагается выше нормальных пределов движения подъемного сосуда на 50 %. В случае увеличения амплитуды ускорения скипа на данном участке на 3–5 %, в течение определенной продолжительности времени (24–48 часов) способствует предаварийному режиму работу ШПУ. Использование систем непрерывного контроля позволяет установить зависимости между отклонения профиля проводников и характером динамического взаимодействия скипа.
51
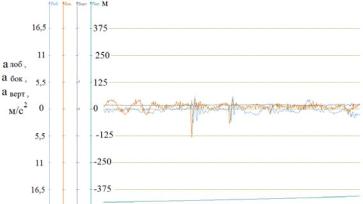
Рис. 2. Графики ускорения скипа в лобовой, боковой и вертикальной плоскости при прохождении –104 яруса
Результаты экспериментальных исследований позволили составить классификационную схему диагностических признаков и дефектов ШПУ, выявляемых посредством предложенной аппаратуры контроля плавности движения скипов в шахтном стволе (рис. 3).
Выводы и рекомендации. Система непрерывного контроля прошла промышленные испытания, показала работоспособное состояние, в условиях агрессивной солевой среды калийных рудников. Система позволяет непрерывно контролировать состояние армировки и подъемного сосуда. Использование данной системы позволит уменьшить время проведения визуального контроля, а так же исключить влияние человеческого фактора на работу подъемной установки.
Система обеспечивает объективный контроль и оценку состояния армировки шахтного ствола, достаточно четко реагирует на дефекты стыков проводников, на любое изменение профиля проводника, а так же на дефекты роликоопор.
Внедрение разработанных предложений в практику эксплуатации скиповых подъёмных установок позволит заменить ежесуточные проверки оборудования подъема еженедельными. В этом случае время работы ШПУ может быть увеличено с 18 до 23 ч в сутки (1 ч необходимо предусмотреть на передачу смен, проверку защит и устранение мелких неисправностей).
52
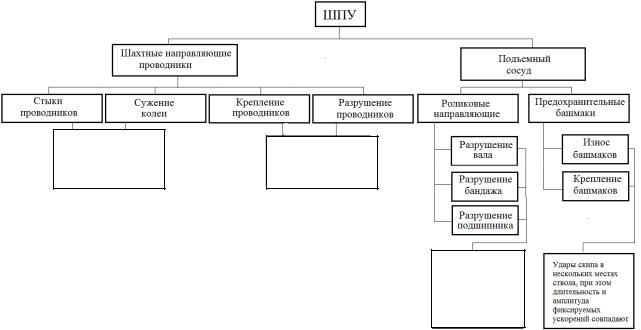
Увеличение ускорения скипа в одном и том же месте (max 8–10 м/с2 )
Увеличение ускорения скипа в одном и том же месте (max 12–14 м/с2
и выше)
Большое количество ударов в стволе, рост максимальных и средне-квадр. ускорений скипа на
15–20 %
Рис. 3. Классификационная схема дефектов шахтных направляющих проводников и подъемных сосудов, соотнесённая с выявленными диагностическими признаками
53
Список литературы
1. Правила безопасности в угольных шахтах: Федеральные нормы и правила в области промышленной безопасности. Серия 05. Выпуск 40. – М.: Научно-технический центрисследованийпроблемпромышленнойбезопасности, 2014. – 200 с.
2. Современные системы безопасности при эксплуатации действующих шахтных подъёмных установок / Г. Д. Трифанов [и др.] // Вестник Пермского национального исследовательского политехнического университета. Геология. Нефтегазовое и горное дело. – 2011. – № 1. – С. 173–188.
3. Микрюков А.Ю. Определение динамических воздействий подъемных сосудов на армировку вертикальных шахтных стволов // Сборник трудов X Междунар. науч.-техн. конф. чтение памяти В.Р. Кубачека. – 2012. – С. 39–44.
Об авторах
Трифанов Геннадий Дмитриевич, доктор технических наук, доцент, заведующий кафедрой горной электромеханики, Пермский национальный исследовательский политехнический университет, Пермь, Россия. kanat@pstu.ru
Микрюков Алексей Юрьевич, аспирант кафедры горной электромеханики, Пермский национальный исследовательский политехнический университет, инженер ООО «Региональный канатный центр», Пермь, Россия. Alexey_mic@mail.ru
About the authors
Trifanov Gennady Dmitrievich, Doctor of Technical Sciences, Associate Professor, Head of Department of Mining Electrical Engineering, Perm National Research Polytechnic University, Perm, Russia. kanat@pstu.ru
Mikryukov Alexey Yurevich, postgraduate student of the Department of Mining Electrical Engineering, Perm National Research Polytechnic University, Engineer of "Regional center of rope", Perm, Russia. Alexey_mic@mail.ru
54
УДК 622.673
ПЕРСПЕКТИВЫ СОЗДАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ПРОХОДЧЕСКИХ ПОДЪЕМНЫХ УСТАНОВОК
А.А. Карпеш, В.С. Вагин, А.И. Курочкин
Магнитогорский государственный технический университет им. Г.И. Носова, Магнитогорск, Россия
Рассматриваются возможности создания следящей системы управления передвижных проходческих подъемных установок с безредукторным гидравлическим приводом.
Ключевые слова: система управления, следящая система, передвижная проходческая подъемная установка.
PROSPECTS OF THE CONTROL SYSTEM HYDRAULIC DRIVES
OF LIFTING INSTALATION
A.A. Karpesh, V.S. Vagin, A.I. Kurochkin
Nosov Magnitogorsk State Technical University, Mаgnitogorsk, Russian Federation
The possibilities of creating a mobile tracking tunnel lifting installations control system of hydraulic drive without reducer.
Keywords: control system, tracker system, mobile elevator installation of tunnel
Внедрение новой техники в горную промышленность базируется на все возрастающей механизации и автоматизации процессов управления машинами и их приводами [1]. Особенно большое применение автоматизация находит в современных системах управления приводами.
Однако широкое применение электрогидравлических и гидромеханических следящих систем управления приводами передвижных проходческих подъемных установок требует проведения большего объема работ, связанных с их проектированием, изготовлением, наладкой, испытанием и освоением промышленностью.
55
Разработкой и совершенствованием безредукторных объемных гидроприводов и их систем управления заняты многие научно-исследовательские институты, конструкторские организации и заводы различных отраслей промышленности [2].
Впроцессе проектирования возникают многочисленные вопросы, связанные
стеоретическим и экспериментальным исследованием электрогидравлических и гидромеханических следящих систем управления. Объясняется это достаточно большим числом элементов, входящих в их структурные схемы, высоким порядком дифференциальных уравнений, описывающих их движение, наличием нелинейных характеристик, неголономных связей и различных ограничений.
Решение этих вопросов требует знаний статических и динамических свойств элементов следящей системы, а также глубокого понимания протекающих в них процессов. Теоретическое изучение и обоснование процессов является основной целью работы при комплексном решении вопросов, возникающих при разработке и создании электрогидравлических и гидромеханических следящих систем управления передвижных проходческих подъемных установок оснащенных высокомоментным безредукторным гидравлическим приводом.
Увеличение быстродействия, надежности, ширины полосы пропускания частот, уменьшение размеров и возможность высококачественной обработки быстро и медленно изменяющихся сигналов, т.е. специфика технических требований при создании нового типа передвижных проходческих подъемных установок, оснащенных безредукторным гидравлическим приводом, требует проектирования специальных электрогидромеханических систем управления.
Наиболее полно этим требованиям удовлетворяют системы, построенные на основе электрогидромеханических элементах. Сейчас уже очевидно, что повышение, например, быстродействия и уменьшения размеров и массы систем управления, при заданных мощностях, возможно лишь при использовании средств электрогидромеханической автоматики. На практике доказано, что ни какие другие системы управления по многим показателям не могут конкурировать с указанными системами управления.
Изучение физических явлений, статических характеристик этих элементов, их
динамических свойств, а также свойств систем в целом дает возможность не только наглядно объяснить природу динамического процесса, но и наиболее правильно составить математическую модель рассматриваемых явлений.
Вкачестве силовых элементов исполнительных механизмов систем управления используются гидромоторы и гидроцилиндры, преобразующие энергию потока жидкости в поступательное или вращательное перемещение выходного звена.
Вследящих системах управления используются преимущественно гидравлические исполнительные механизмы с дроссельным и объемным управлением.
56
Втех случаях, когда следящие системы должны обладать высоким быстродействием и малыми размерами, используются исполнительные механизмы дроссельного управления. Исполнительные механизмы с объемным управлением применяются, как правило, в следящих системах управления с большими выходными мощностями.
Несмотря на преимущества электргидромеханических следящих систем управления, часто возникают большие трудности их построения, связанные с особенностями динамических свойств силовых элементов. Особенно это относится к электрогидравлическим исполнительным механизмам дроссельного управления. Эти трудности связанны в основном с измерением действующих нагрузок, усилением и преобразованием полученной информации и обратного введения в систему сигнала коррекции.
Таким образом, одним из основных этапов создания новых следящих гидроприводов является их изучение и исследование с целью определения рабочих характеристик; изучение внутренних процессов и определение влияния их на силовые режимы гидромашин; выявления надежности и долговечности работы гидромашин; установление динамического облика следящего гидропривода; его структурной схемы, постоянных времени, добротности, запаса устойчивости и быстродействия; проверкисуществующих методоврасчетаиполучениеисходных данных для разработки новых методов расчета; определение эксплуатационных качеств силовой системы привода и системы управления и эффективности применения в передвижных проходческих подъемных установкахмобильного исполнения.
Всистемах управления современных мобильных машин и летательных аппаратов широко применяются силовые гидравлические приводы с дроссельным и объемно-дроссельным регулированием, которые имеют хорошие энергетические, динамические и эксплуатационные характеристики. Следящие гидросистемы управления можно разделить на два класса: следящие гидросистемы с электрическим управлением и следящие гидросистемы с механическим управлением.
На новых мобильных машинах находит применение (более совершенная) система электрогидравлического дистанционного управления, у которых золотниковый гидрораспределитель управляется от электрического сигнала. По сравнению с системой гидромеханического управления она имеет целый ряд преимуществ: практически неограниченное дистанционное управление, т.е. возможность управления не только по проводам, но и по радио; легко и аппаратурно просто обеспечить формирование корректирующих сигналов; наличие электрической части позволяетстыковатьс ЭВМ и использовать еедляоптимизациихарактеристик.
57
Основной проблемой разработки и проектирования электрогидравлической дистанционной системы управления, не имеющей механической проводки управления, является обеспечения высокой надежности работы.
Для увеличения надежности систем управления применяется резервирование многоканальных электрогидравлических приводов управления. Разработка и производство резервированных систем базируется на методах автоматизированного проектирования с помощью ЭВМ. Для этого необходима разработка оптимальных математических моделей и быстродействующих алгоритмов автоматизированного проектирования.
Следящие гидросистемы с механическим управлением применяются в системах управления, которые позволяют машинисту машины (оператору) непосредственно с помощью механических тяг или канатов управлять золотниками (гидрораспределителями) гидромеханического рулевого привода.
Управляющая система гидроприводом, включающая механическую проводку управления и силовую проводку к органу управления, несмотря на конструктивную простоту, представляет собой сложную нелинейную гидромеханическую систему, склонную к автоколебаниям. Такая система имеет большое практическое значение потому, что позволяет повысить демпфирующие свойства системы управления, что является весьма благоприятным для проходческих подъемных установок, как правило, управляемых с помощью рукоятки управления вручную.
Всвязи с тем, что высота проходческого подъема ежесуточно увеличивается и только в конце проходки ствола достигает своего максимума, полное время подъема является величиной переменной, а, следовательно, и производительность проходческого подъема в различные периодыпроходкистволашахтыразлична.
Процесс работы проходческого подъема состоит из ряда повторяющихся циклов движения подъемных сосудов в стволе с различными скоростями и их пауз. Таким образом, специфика эксплуатации проходческого подъема требует непрерывного управления работой подъемного двигателя и это вызвано тем, что для проходческого подъема применяются многопериодные диаграммы скорости (для двухконцевого 33-периодная, для одноконцевого 41-периодная) [3].
Всвязи с этим приобретает первостепенное значение необходимость разработки способов и системы управления безредукторным гидроприводом подъемной машины.
На основании выполненного выше анализа следящих гидросистем управления в качестве следящей системы управления гидроприводом проходческой подъемной установки следует принять гидромеханическую следящая система управления с дроссельным регулированием, обладающую малой массой, высокой надежностью, компактность, простотой конструкции и высоким быстродействием.
58
Список литературы
1. Кантович Л.И., Вагин В.С., Курочкин А.И. Перспективы создания малогабаритных передвижных проходческих подъемных установок // Горный информацион- но-аналитический бюллетень (научно-технический журнал). – 2016. – № S1. –
С. 396–417.
2.Вагин В.С. Гидромеханическая следящая система управления безредукторного гидропривода проходческого подъема // Горное оборудование и электро-
механика. – 2013. – № 7. – С. 21–26.
3.Строительство стволов шахт и рудников / под ред. О.С. Докукина, Н.С. Бо-
лотских. – М.: Недра, 1991. – 518 с.
Об авторах
Карпеш Антон Алексеевич, аспирант кафедры ГМиТТК, Магнитогорский государственный технический университет им. Г.И. Носова, Магнитогорск, Россия. totti-92@list.ru
Вагин Владимир Сергеевич, доктор технических наук, доцент, профессор кафедры ГМиТТК, Магнитогорский государственный технический университет им. Г.И. Носова, Магнитогорск, Россия. totti-92@list.ru
Курочкин Антон Иванович, старший преподаватель кафедры ГМиТТК, Магнитогорский государственный технический университет им. Г.И. Носова, Магнито-
горск, Россия. antoshey@mail.ru.
About the authors
Karpesh Anton Alekseevich, postgraduate student of chair GMiTTK, Nosov Magnitogorsk State Technical University, Mаgnitogorsk, Russian Federation. totti-92@list.ru
Vagin Vladimir Sergeevich, the professor of chair GMiTTK, the senior lecturer, Doct.Tech.Sci, Nosov Magnitogorsk State Technical University, Mаgnitogorsk, Russian. Federation totti-92@list.ru
Kurochkin Anton Ivanovich, senior teacher of chair GMiTTK, Nosov Magnitogorsk State Technical University, Mаgnitogorsk, Russian Federation. antoshey@mail.ru.
59
УДК 622.68
КАРЬЕРНЫЕ АВТОПОЕЗДА НА ОТКРЫТЫХ ГОРНЫХ РАБОТАХ
В.В. Халецкий1, М.И. Ахметова2
1Магнитогорский государственный технический университет им. Г.И. Носова, Магнитогорск, Россия,
2Казахский национальный исследовательский технический университет имени К.И. Сатпаева, Алматы, Казахстан
Проанализирована возможность использования автосамосвалов в составе карьерных автопоездов на отрытых горных разработках с точки зрения повышения эффективности автомобильного транспорта в карьерах.
Установлено, что работа автосамосвалов в составе карьерных автопоездов позволяет повысить эффективность работы автомобильного транспорта, значительно сократить протяженность трассы, уменьшить объем горно-капитальных работ и их стоимость, уменьшить капитальные затраты на транспорт и его эксплуатацию, а также увеличить глубину отработки карьера и отказаться от подземной разработки нижних горизонтов месторождения.
Ключевые слова: автосамосвал, уклон, касательная сила тяги, коэффициент трения (сцепления), автопоезд, автосцепка.
CAREER ROAD TRAINS ON OPEN MINING OPERATIONS
V.V. Haletskiy1, M.I. Akhmetova2
1Nosov Magnitogorsk State Technical University, Magnitogorsk, Russia 2Kazakh National Technical Research University named after K.I. Satpaev, Almaty, Kazakhstan
The possibility of use of dump trucks as a part of career auto trains on the dug-out mountain developments from the point of view of increase in efficiency of a road transport in pits is analysed.
It is established that work of dump trucks as a part of career auto trains allows to increase overall performance of a road transport, to considerably reduce route extent, to reduce amount of mountain and capital works and their cost, to reduce capital expenditure for transport and its operation, and also to increase depth of working off of a pit and to refuse underground mining of the lower horizons of the field.
60