

Актуальные проблемы повышения эффективности и безопасности эксплуат
..pdfТакже были получены габариты всего устройства. Устройство занимает площадь 7,5 м2, без учета емкости для сбора сжиженного газа, так как она подбирается индивидуально для конкретных условий эксплуатации.
Достоинства данного устройства:
Сжижение в непосредственной близости от добывающей скважины, без необходимости транспортирования на газоперерабатывающий завод;
Высокая надежность ввиду отсутствия трущихся и вращающихся частей;
Экономичность (ВТ и дроссели имеют сравнительно низкую стоимость);
Отсутствие хладагентов;
Простота обслуживания и эксплуатации.
Перспективным направлением применения данного устройства является создание плавучих терминалов для сжижения природного газа на море, что избавит от необходимости транспортирования газа на берег для сжижения [2]. Также устройство можно использовать для низкотемпературной сепарации ПНГ или природного газа.
Список литературы
1.Меркулов А.П. Вихревой эффект и его применение в технике. – Самара:
Оптима, 1997. – 184 с.
2.Федорова Е.Б. Современное состояние и развитие мировой индустрии сжиженного природного газа: технологии и оборудование. – М.: РГУ нефти и газа имени И.М. Губкина, 2011. – 159 с.
Об авторах
Лихачева Екатерина Александровна, магистрант кафедры горной электромеханики, Пермский национальный исследовательский политехнический универси-
тет, Пермь, Россия. 1993.perm@gmail.com.
Островский Виктор Георгиевич, кандидат технических наук, доцент кафедры горной электромеханики, Пермский национальный исследовательский политехнический университет, Пермь, Россия. ostrov_13@mail.ru.
About the authors
Likhacheva Ekaterina Aleksandrovna, master student of chair mining Electromechanics, Perm National Research Polytechnic University, Perm, Russia. 1993.perm@gmail.com.
Ostrovskiy Victor Georgievich, Candidate of Technical Sciences, Associate Professor of the Department mining Electromechanics, Perm National Research Polytechnic University, Perm, Russia. ostrov_13@mail.ru.
121
УДК 622.276.53-886
ЭКСПЛУАТАЦИЯ НЕФТЯНЫХ СКВАЖИН ГИДРОПРИВОДНЫМИ ШТАНГОВЫМИ УСТАНОВКАМИ «ГЕЙЗЕР»
А.А. Иванченко
Пермский национальный исследовательский политехнический университет, Пермь, Россия
Представлена информация о гидравлическом приводе штангового скважинного насоса, также произведен расчет нагрузки в точке подвеса штанг гидравлического и механического приводов.
Ключевые слова: гидравлический привод, станок-качалка, точка подвеса штанг, кинематика движения.
EXPLOITATION OF OIL WELLS BY HYDRAULIC DRIVE SUCKER ROD
FACILITYS «GEYSER»
А.А. Ivanchenko
Perm National Research Polytechnic University, Perm, Russia
The paper presents information on the hydraulic drive Deep Well Pump, also calculated the load at the rod hanger center of the hydraulic and mechanical drives.
Keywords: hydraulic drive, pumpjack, rod hanger center, kinematics of motion.
Первоначально гидроприводные установки были разработаны в США как устройства, обеспечивающие длины ходов более 6 м и уменьшение динамической составляющей усилия, действующего на колонну штанг. Они успешно эксплуатировались, однако широкого промышленного применения не получили из-за низкой надежности, громоздкости, сложности обслуживания. Попытки повторения этих конструкций с использованием отечественной элементной базы гидропривода успехов не принесли.
Надежные и эффективные гидроприводные установки для добычи нефти штанговыми скажинными насосами появились, по существу, только в 70-80-х годах прошлого столетия, когда была создана элементная база гидропривода – насосы,
122
распределители, клапаны, уплотнения и т.п. Машины и аппараты с высокими энергетическими показателями и достаточными показателями надежности.
Первая конструкция, которая выпускалась серийно и стала широко эксплуатироваться на промыслах, была разработанная Г.В. Молчановым гидроприводная качалка, известная под шифром «АГН». Отличительной особенностью этой установки является использование колонны НКТ в качестве уравновешивающего груза, что в сочетании с объемным гидроприводом позволило монтировать ее непосредственно на устье скважины без специального фундамента.[1]
В«ЛУКОЙЛ-ПЕРМЬ» успешно прошёл промысловые испытания и внедряется взамен морально и физически устаревших станков-качалок гидравлический привод штангового глубинного насоса «Гейзер» отечественной разработки (ООО «НПП «ПСМ-Импэкс, г. Екатеринбург), состоящий из рамы с силовым гидроцилиндром, установленной на устьевой арматуре скважины, и насосной станции, расположенной рядом в блок-боксе. В настоящее время фонд «Гейзеров» в ЦДНГ-10 составляет более 100 единиц.
Конструкцию гидропривода разберем на примере установки с динамическим уравновешиванием (Pис.1) именно такой вид уравновешивания у установок «Гейзер».
Она включает в себя приводной гидравлический цилиндр 1, поршень 2 который посредством штока 3, устьевого штока 17 и колонны штанг 16 соединен с плунжером 15 скважинного насоса, цилиндр 14 которого подвешен на колонне 13.
Привод установки осуществляется двигателем 7, вращающим вал силового мотор-насоса 5, на котором установлен маховик 6. Гидравлическая схема состоит из силового золотника 4, переливного 11, разгрузочного 8 обратного 10 клапанов, бака 12, а также системы реверсирования, фильтрации и т.п.
Вэлектрическую цепь двигателя включено реле тока 9, управляющее электромагнитным приводом разгрузочного клапана 8, который служит для уменьшения нагрузки на двигатель при его запуске.
При движении штанг вверх энергия для подъема столба жидкости и колонны штанг подводиться от электродвигателя и маховика. При ходе штанг вниз потенциальная энергия штанг посредством гидропривода передается маховику, который
еезапасает. Помимо этого при ходе штанг вниз электродвигатель также передает свою энергию маховику.
Таким образом, при ходе штанг вверх кинетическая энергия маховика расходуется на подъем колонны штанг и жидкости, а при ходе штанг вниз маховик запасает потенциальную энергию штанг и приводного двигателя.
Особенность установок с динамическим (инерционным) уравновешиванием является отсутствие необходимости в ее уравновешивании – диапазон изменения числа оборотов маховика устанавливается автоматически. В зависимости от диапазона изменения нагрузок при ходе штанг вверх и вниз [2].
123
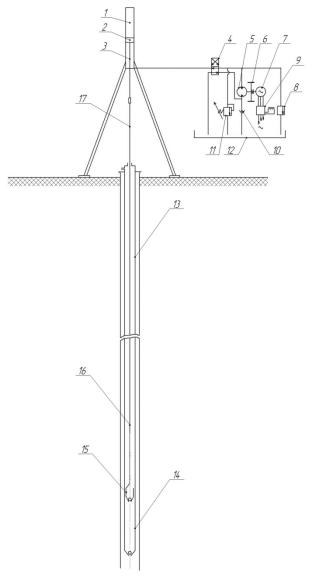
Рис. 1. Установка с динамическим уравновешиванием
124
В работе выполнен подбор оборудования для скважины №400 Сосновского месторождения ЦДНГ-10. По методике, представленной в [3] был подобран станоккачалка СК-8 – 3,5–4000. В размерном ряде ООО «НПП «ПСМ-Импэкс» существует гидравлический привод штангового скважинного насоса ГПШСН 80-3,5 РЭ с аналогичными техническими характеристиками.
Расчет нагрузки в точке подвеса штанг ГПШСН80-3,5 РЭ Площадь сечения штанг:
fш |
|
dш |
2 |
3,8 10 4 м2 |
(1) |
|
4 |
|
|
|
|
Площадь плунжера:
fп 4 (dп2 dш2 ) 1,14 10 3 м2
Площадь сечения НКТ:
fнкт 4 (D2нкт d 2нкт ) 1,166 10 3 м2
Площадь канала НКТ:
Fнкт 4 dнкт2 3, 019 10 3 м2
Масса колонны штанг в воздухе:
mш 7800 fш Lн 3, 303 103 кг
Вес колонны штанг в жидкости:
Ps (7800 1000) g fш Lн 2,825 104 Н
Вес жидкости над плунжером:
Pzh fп 1000 g (Lн hн ) 9,106 103 Н
Упругие удлинения в штангах:
(2)
(3)
(4)
(5)
(6)
(7)
|
|
P L |
|
9,1 103 1114 |
0,133 |
|
|||
zh |
н |
|
|
(8) |
|||||
2 1011 fш |
2 1011 |
3,8 10 4 |
|||||||
ш |
|
|
|
|
|||||
Упругие удлинения в НКТ:
|
|
P L |
|
9,1 103 1114 |
0, 043 |
|
|||
zh |
н |
|
|
(9) |
|||||
2 1011 fнкт |
2 1011 |
1,166 10 3 |
|||||||
нкт |
|
|
|
|
|||||
Усилие в ТПШ в зависимости от хода штока при ходе штанг вверх (Рис.2):
P (t) |
|
2 1011 S(t) |
P |
|
|||
|
1 |
|
1 |
|
|
||
1 |
|
|
) L |
s |
(10) |
||
( |
|
||||||
|
|
|
|
||||
|
|
fнкт |
|
|
н |
|
|
|
|
|
fш |
|
|
||
125
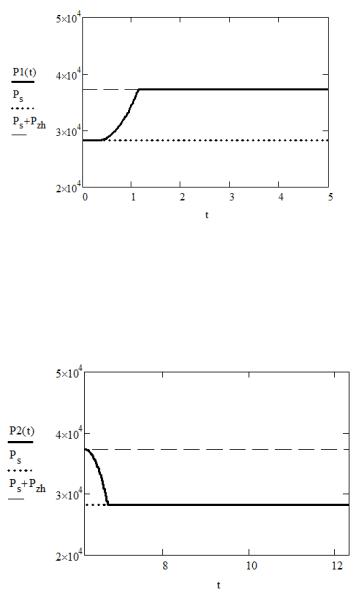
Рис. 2. График усилия в точке подвеса штанг в зависимости от хода при ходе штанг вверх
Усилие в ТПШ в зависимости от хода штока при ходе штанг вниз (Рис.3):
P (t) P |
P |
(H S(t)) 2 1011 |
|
||||||
|
|
||||||||
2 |
zh |
s |
1 |
|
1 |
|
L |
(11) |
|
|
|
( |
) |
||||||
|
|
|
|
|
|||||
|
|
|
|
fнкт |
|
fш |
н |
|
|
|
|
|
|
|
|
|
|||
Рис. 3. График усилия в точке подвеса штанг в зависимости от хода при ходе штанг вниз
126
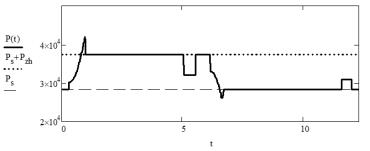
Усилие в ТПШ гидравлического привода штанговой глубинной установки с учетом сил инерции за двойной ход (Рис.4)
Коэффициент инерции:
m |
fп fш |
|
Pж |
0, 093 |
(12) |
||
|
|||||||
|
P |
|
|||||
|
F |
f |
ш |
|
|
|
|
|
нкт |
|
|
ш |
|
|
|
При ходе штанг вверх:
|
P (t) |
|
|
|
2 1011 S(t) |
|
P m A(t) 0,5 |
||||||||||||
|
|
( 1 |
|
|
|
|
|
|
|||||||||||
|
11 |
|
|
1 ) L |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s ш |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|||||
|
|
|
|
|
fнкт |
|
fш |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
P21 (t) Ps Pzh (1 m) mш A(t) |
||||||||||||||||||
|
|
1 (t) |
(1 m) mш A(t) Lн |
||||||||||||||||
|
|
|
|
|
2 1011 fш |
|
|
||||||||||||
При ходе штанг вниз: |
|
|
|
|
|
|
|
|
|
|
|
||||||||
P (t) P P |
(H S(t)) 2 1011 |
(1 m) m A(t) |
|||||||||||||||||
|
|
||||||||||||||||||
12 |
zh |
|
s |
( |
|
|
1 |
1 ) L |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ш |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|||
|
|
|
|
|
|
|
|
|
fнкт |
|
|
||||||||
|
|
|
|
|
|
|
|
|
fш |
||||||||||
|
|
|
P 22 (t) Ps 0,5 mш A(t) |
||||||||||||||||
|
|
2 (t) |
|
(1 m) mш A(t) Lн |
|||||||||||||||
|
|
|
|
|
2 1011 fш |
|
|||||||||||||
(13)
(14)
(15)
(16)
(17)
(18)
Рис. 4. Нагрузки в точке подвеса колонны штанг гидравлического привода штанговой глубинной установки за двойной ход
Расчет кинематики движения СК8-3,5-4000 Исходные данные для станка-качалки СК8-3,5-4000
127
Длина переднего плеча балансира k1 = 3,5 м Длина заднего плеча балансира k2 = 2,5 м Длина шатуна l = 3 м
Радиус кривошипа r = 1,2 м Перемещение станка-качалки:
Sк (t) k1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
2 |
|
|
|
|
|
|||
r (1 |
cos( t)) |
|
|
|
sin( t)2 |
(19) |
|||||||||||||||||||||
2l |
|||||||||||||||||||||||||||
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Скорость станка-качалки: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
||||
vк (t) |
|
1 |
r |
sin( t) |
|
|
|
sin 2( t) |
(20) |
||||||||||||||||||
|
2l |
||||||||||||||||||||||||||
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Ускорение станка-качалки: |
|
|
||||||||||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
||||
aк (t) |
|
1 |
|
r |
cos( t) |
|
cos 2( t) |
(21) |
|||||||||||||||||||
|
|
l |
|||||||||||||||||||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Усилие в ТПШ станка-качалки с учетом сил инерции за двойной ход (рис. 5) |
|||||||||||||||||||||||||||
При ходе штанг вверх: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Pк11 (t) |
|
|
2 1011 |
Sк (t) |
|
Ps |
mш ак (t) 0,5 |
|
|||||||||||||||||||
( |
|
|
1 |
|
1 |
) L |
(22) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
fнкт |
|
|
|
|
fш |
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Pк21 (t) Ps Pzh (1 m) mш ак(t) |
|
(23) |
|||||||||||||||||||||||||
к1 (t) |
|
(1 m) mш ак (t) Lн |
|
(24) |
|||||||||||||||||||||||
|
|
|
|
|
2 1011 fш |
|
|
|
|
|
|||||||||||||||||
При ходе штанг вниз: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
(Sк ( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Pк12 (t) Pzh Ps |
|
|
|
) Sк (t)) 2 1011 |
(1 m) mш ак (t) |
(25) |
|||||||||||||||||||||
|
|
|
|
( |
|
|
1 |
|
|
1 |
) L |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
fнкт |
|
|
fш |
|
|
н |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
к2 (t) |
|
(1 m) mш ак (t) Lн |
|
(27) |
|||||||||||||||||||||||
|
|
|
|
2 1011 fш |
|
|
|
|
|
||||||||||||||||||
P к22 (t) Ps 0,5 mш ак(t) |
|
(26) |
|||||||||||||||||||||||||
128

Рис. 5. Нагрузки в точке подвеса колонны штанг станка-качалки за двойной ход
Были рассчитаны нагрузки в точке подвеса штанг для механического и гидравлического приводов. Расчеты показали, что нагрузки в точке подвеса штанг у гидравлического привода на 10% меньше, чем у механического.
Список литературы
1.Молчанов Г.В., Молчанов А.Г. Машины и оборудование для добычи нефти
игаза: учеб. для вузов – М., Недра, 1984. – 464 с.
2.Расчет и конструирование нефтепромыслового оборудования: учеб. пособие для вузов / Л.Г. Чичеров, Г.В. Молчанов, А.М. Рабинович [и др.]. – М.: Недра, 1987. – 422 с.
3.Справочное руководство по проектированию разработки и эксплуатации нефтяных месторождений. Добыча нефти / Ш.К. Гиматудинов, Р.С. Андриасов, И.Т. Мищенко, А.И. Петров [и др.]. – М.: Недра, 1983. – 455 с.
Об авторе
Иванченко Анна Анатольевна, магистрант, Пермский национальный исследовательскийполитехническийуниверситет, Пермь, Россия. ya.permyakova20@yandex.ru
About the author
Ivanchenko Anna Anatolievna, master student, Perm National Research Polytechnic University, Perm, Russia. ya.permyakova20@yandex.ru
129
УДК 622.276.53
КРАТКИЙ ОБЗОР СПОСОБОВ УРАВНОВЕШИВАНИЯ СТАНКОВ-КАЧАЛОК
М.В. Бажин, А.К. Муравский
Пермский национальный исследовательский политехнический университет, Пермь, Россия
Описана сущность уравновешивания станков-качалок, рассмотрены основные способы уравновешивания станков-качалок, достоинства и недостатки каждого способа.
Ключевые слова: станок-качалка, уравновешивание, роторное уравновешивание, балансирное уравновешивание, комбинированное уравновешивание, пневматическое уравновешивание.
SUMMARY OF WAYS TO BALANCED PUMPING UNITS
M.V. Bazhin, A.K. Muravskiy
Perm National Research Polytechnic University, Perm, Russia
The described the essence of balanced pumping units, the basic ways of balancing pumping units, the advantages and disadvantages of each method.
Keywords: pumping unit, balanced, rotor balanced, rocker balanced, combined balanced, air balanced.
Для приведения в движение колонны насосных штанг в глубоконасосной скважине наибольшее распространение получили индивидуальные установки балансирного типа с кривошипно-шатунным механизмом, которые называются стан- ками-качалками (рис. 1). К настоящему времени их конструкции очень многочисленны.
Станки-качалки предназначены для откачивания скважинной жидкости обводненностью не более 99%, температурой до 130°С и вязкостью до 0,3 Па-с [1].
Важной особенностью балансирных станков-качалок является их неуравновешенность, т.е. большие изменениякрутящего моментанакривошипном валу.
130