

Теория автоматического управления. Нелинейные системы
.pdf4. УСТОЙЧИВОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ
4.1.Понятие устойчивости нелинейных систем
Применение методов исследования линейных систем для анализа динамики нелинейных систем возможно с учетом двух понятий движения:
1)невозмущенное движение – одно из возможных расчетных движений системы при определенных начальных условиях и заданном внешнем воздействии;
2)любое другое движение – возмущенное, получаемое за счет приложения к системе кратковременного внешнего возмущения при t = 0.
Процессы в автономных нелинейных системах можно рассматривать как частные случаи невозмущенных движений, при исследовании которых важным вопросом является анализ стационарных (установившихся) движений. При анализе их устойчивости рассматриваются два вида устойчивости движения: устойчивость со-
стояния равновесия и устойчивость периодических движений (автоколебаний).
Пусть нелинейная система управления описывается системой обыкновенных дифференциальных уравнений с постоянными коэффициентами в векторной форме
dx |
= ϕ(x), |
(4.1) |
|
||
dt |
|
|
где x – вектор состояния x = x(x1, x2,…xn), φ – вектор-функция,
φ = φ(φ1, φ2, … φn).
Функции φk и их производные по всем переменным хj в (4.1)
непрерывны.
Решение системы будет x(t), определяемое вектором начальных условий, заданных в некоторый момент времени t = t0 x0 = = x0(x10, x20, …xn0).
71
elib.pstu.ru
Обычно t0 = 0, поэтому более наглядным является решение: x1 = x1(t, x0), x2 = x2(t, x0),… xn = xn(t, x0) и в векторной форме x =
= x(t, x0).
Решение системы может быть получено линеаризацией непрерывных функций φk, тогда как во многих случаях в нелинейных системах функции φk являются кусочно-линейными, разрывными и даже неоднозначными.
4.1.1. Анализ стационарных движений
Состояние равновесия как вид стационарного движения описывается системой конечных уравнений, получаемых из системы (4.1), когда производные равны нулю:
0 = φ1(x1, x2, … xn), 0 = φ2(x1, x2, … xn),
………………….. (4.2)
0 = φn(x1, x2, … xn).
Пусть система (4.2) имеет m решений a(a1i, a2i,… ani) для i = 1,2…m, тогда для системы (4.1) имеем
x1(t) ≡ a1i, x2(t) ≡ a2i,… xn(t) ≡ ani при t = 0÷∞. |
(4.3) |
Решения по (4.3) называются стационарными движениями, хотя им соответствует точка, пребывающая в неподвижном состоянии.
Вторым классом стационарных движений в динамической нелинейной системе являются периодические движения, в процессе которых переменные совершают колебания с периодом Т:
x1(t) = x1(t + T), x2(t) = x2(t + T), … xn(t) = xn(t + T). |
(4.4) |
Различают два принципиально разных вида периодических движений: предельные циклы и консервативные движения.
Предельный цикл представляет собой изолированную замкнутую траекторию. В достаточно малой окрестности этой траектории не существует других замкнутых траекторий. Все траектории в этой окрестности или «наматываются» на предельный цикл, или удаляются от него.
72
elib.pstu.ru
Предельным циклам фазового пространства в системе соответствуют автоколебания. Присущие линейным системам консервативные движения в нелинейных системах встречаются редко.
Устойчивость положения равновесия определяется по Ляпу-
нову, следующим образом.
Пусть положение равновесия системы a(a1, a2,… an). Состояние равновесия a называется устойчивым, если для ка-
ждого заданного (сколь угодно малого) положительного числа ε можно найти такое положительное число δ(ε), при котором выполнение неравенства:
׀xk0 – ak ׀ < δ для k = 1, 2, …, n |
(4.5) |
для всего бесконечного интервала времени 0 < t < ∞ будут справедливы неравенства
׀xk(t) – ak׀ < ε для k = 1, 2, …, n. |
(4.6) |
Положение равновесия называется асимптотически устойчивым по Ляпунову, если дополнительно к (4.4) и (4.5) имеет место условие
׀ xk(t) – ak׀ →0, при t→0, k = 1, 2, …, n. |
(4.7) |
Если существует такое ε, при котором хотя бы в одном случае нельзя найти такое число δ(ε), чтобы было выполнено (4.5) для всех t > 0, то положение «a» называется неустойчивым по Ляпунову.
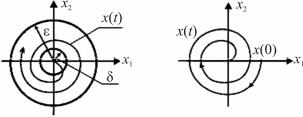
На рис. 4.1 проиллюстрированы понятия устойчивости по Ляпунову и частного случая асимптотической устойчивости.
Рис. 4.1. К понятию устойчивости по Ляпунову (траектория х(х0, t) начинается в некоторой δ-окрестности и не покидает ε-окрестность)
73
elib.pstu.ru
Пример 4.1
1.Пусть уравнение системы x′= –x, решение которого x(t) = x0 e–t. Точка равновесия х = 0 асимптотически устойчива, так как при любом значении х0 функция x(t)→0 при t→∞.
2.Решением уравнения x′= + x является x(t) = x0 et. Точка равновесия неустойчива, так как при любом значении х0 функция x(t)→∞ при t→∞.
3.Пусть x1' = − x2 и x2' = x1 . Этой системе соответствует уравне-
ние консервативного звена x2'' + x2 = 0 . Его решение x2(t) = A sin(t + ξ),
где А и ξ – постоянные интегрирования. Всегда по заданному ε можно выбрать δ таким образом, чтобы окружность имела радиус меньше ε. Положение равновесия х1 = 0, х2 = 0 устойчиво по Ляпунову, но не асимптотически устойчиво.
Устойчивость по Ляпунову для периодических движений
определяется относительно периодического решения φ(t) системы,
описываемой (4.1). Периодическое решение φ(t) называется ус-
тойчивым по Ляпунову, если для каждого заданного положительного числа ε можно найти такое положительное число δ(ε), при котором выполняется неравенство
׀xk(t0) – φk(t0)׀ < δ для k = 1, 2, …, n, |
(4.8) |
для любых t > t0 выполняется неравенство |
|
׀xk(t) – φk(t) ׀ < ε для k = 1, 2, …, n, |
(4.9) |
и, кроме того, выполняется условие |
|
׀xk(t) – φk(t) ׀ →0, при t→0, k = 1, 2, …, n, |
(4.10) |
топериодическое движение асимптотически устойчиво по Ляпунову. Ограничения, налагаемые условием устойчивости по Ляпунову, выполняются редко. Поэтому для периодических движений используется условие устойчивости, называемое орбитной устойчи-
востью.
Периодическое движение φ(t) называется орбитно-устойчи-
вым, если для любого ε можно найти такое δ(ε), при котором любая фазовая траектория, находящаяся при t = t0 в δ-окрестности траекто-
74
elib.pstu.ru

рии периодического движения, для всех t = t0 ÷ ∞ не выйдет из ε-окрестности траектории периодического движения.
Орбитная устойчивость требует близости не изображающих точек решения φ(t) и близкого к нему при t = t0 решения x(t), а близости траектории этих точек в пространстве.
Периодическое движение называется асимптотически орбитноустойчивым, если все упомянутые траектории при t→∞ асимптотически приближаются ктраектории периодического движения φ(t).
Пояснение окрестности к понятию орбитной устойчивости дано на рис. 4.2, где показана часть замкнутой траектории φ(t).
Рис. 4.2. К пояснению орбитной устойчивости
4.2. Методы определения устойчивости положения равновесия
В 1892 г. А.М. Ляпунов опубликовал классическую работу «Общая задача об устойчивости движения». В этой работе предложены два метода исследования устойчивости положения равновесия.
Первый метод: определение устойчивости положения равновесия по уравнению первого приближения. Это уравнение, следуя принятой в технике традиции, будем называть линеаризованным
уравнением.
Второй метод (прямой метод Ляпунова) сводится к построению некоторых функций, называемых функциями Ляпунова.
75
elib.pstu.ru
4.2.1 Линеаризация нелинейных систем, описываемых дифференциальными уравнениями n-го порядка
Если требуется провести линеаризацию уравнения движения
системы относительно опорной траектории |
xoп (t) , являющейся |
решением уравнения |
|
& |
(4.11) |
x(t) = F t, x(t),r(t)] |
|
|
|
при некотором входном сигнале roп (t) и начальных условиях,
x(t0 ) = xoп0 , т.е. |
|
|
& |
, |
(4.12) |
xoп (t) = F [t, xoп (t),roп (t)], xoп (t0 ) = xoп0 |
то поведение x(t) нелинейной системы в окрестности опорной траектории может быть представлено с помощью отклонений x(t) от
опорной траектории x(t) = xoп (t) + δx(t) , подставляя |
которое |
|
в (4.11), имеем |
|
|
& |
& |
(4.13) |
xoп (t) + δx(t) = F [t, xoп (t) + δx(t), roп (t) + δr(t)] , |
||
где вариация внешних воздействий δr(t) = r(t) − roп (t).
Разложим функцию F в ряд Тейлора в окрестности опорной траектории. Ограничившись только линейными членами уравнения и вычитая (4.12) из (4.13), получим, что вариации δ x(t) описываются системой линейных уравнений:
δx&(t) = Fx [t, xoп (t),roп (t)]δx(t) + Fr [t, xoп (t),roп (t)]δr(t) ,
δx(t0 ) = x(t0 ) − xoп0 , |
(4.14) |
где Fx и Fr – матрицы частных производных вектор-функции F(t, x, r) по соответствующим аргументам,
|
|
∂fi |
|
|
|
∂fi |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Fx |
= |
|
, |
Fr |
= |
|
, i = 1,n, j = 1,n, k = 1,m. |
||||||
|
|
∂xj |
|
|
∂rk |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
76
elib.pstu.ru
Дальнейший анализ нелинейной системы в окрестности опорного режима проводится методами анализа линейных систем, применяемыми к уравнениям в вариациях (4.14).
Пример 4.2
Пусть требуется провести линеаризацию системы, описываемой нелинейным дифференциальным уравнением функции одной переменной
F = x′′′ + (x′′)2 + sinx′ + eх –1 + r2 – r = 0
с начальными условиями x(0) = x0, x′(0) = x′0, x′′(0) = x′′0 относи-
тельно опорной траектории xоп(t) ≡ 0, rоп(t) ≡ 0.
Определим коэффициенты разложения функции F в ряд Тейлора:
a3 = (∂F/∂x′′′)оп = 1, a2 = (∂F/∂x′′)оп = (2x′′)оп = 0,
a1 = (∂F/∂x′)оп = (cosx′)оп = 1,
a0 = (∂F/∂x)оп = (eх)оп = 1, b1 = –(∂F/∂r′)оп =
= –(2r′)оп = 0, b0 = –(∂F/∂r)оп = 1.
Отсюда получим дифференциальное уравнение линеаризованной системы:
δx′′′(t) + δx′(t) + δx = δr(t);
δx(0) = x0 − xoп (0) = x0 ; |
|
|||
δx′(0) = x′ − x′ |
(0) = x′ ; |
|
||
|
0 |
oп |
0 |
|
δx′′(0) = x′′ − |
x′′ |
(0) = x′′(0). |
||
|
0 |
oп |
|
|
Необходимое условие положительности всех коэффициентов |
||||
характеристического |
уравнения |
системы |
D(λ) = λ3 + λ + 1 = 0 не |
|
выполняется, так как |
a2 = 0 . Кроме того, |
по критерию Гурвица |
||
должно выполняться |
неравенство |
а1а2 > а3а0, однако а1а2 = 0, |
||
а3а0 = 1, поэтому делаем вывод, что система неустойчива. |
||||
Корни характеристического |
полинома: D(λ) / λ1 = −0,6823 , |
|||
λ2,3 = 0,3412 ± 1,1615i , из которых λ2,3 имеют положительную ве-
щественную часть, поэтому согласно теоремам первому методу Ляпунова система неустойчива.
77
elib.pstu.ru
4.2.2. Линеаризация нелинейных систем, описываемых дифференциальными уравнениями в форме Коши
Метод применяется для исследования устойчивости нелинейных систем по линеаризованным уравнениям для малых вариаций переменных.
Применим первый метод Ляпунова к дифференциальным уравнениям в пространстве состояний нелинейных систем.
Пусть динамическая система описывается уравнением
dx |
= φ( x) , |
(4.15) |
|
||
dt |
|
|
где x – вектор состояния, φ – вектор-функция.
Обозначим через x* вектор координат исследуемого положения равновесия, т.е. решение системы уравнений φ(x) = 0, и положим, что функция φ допускает разложение в ряд Тейлора в точке x*. Пренебрегая малыми высшего порядка по сравнению с малыми вариациями δx, получим уравнение линеаризованной системы
|
|
|
|
|
dδx |
= A(x )δx, |
(4.16) |
|||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
∂φ1 |
|
|
|
∂φ1 |
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
||
|
|
|
∂x1 |
∂xn |
|
|
||||||
где A(x*) = |
∂φ(x) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||||||
|
= ... ... |
... |
|
– |
|
|||||||
|
∂x |
x =x* |
|
∂φn |
|
|
∂φn |
|
|
|
||
|
|
|
|
... |
|
|
|
|||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
∂x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂xn |
|
|
||
– матрица первых производных нелинейной функции (матрица Якоби), вычисляемых в точке равновесия x = x*.
Согласно первому методу Ляпунова об устойчивости «в малом» положения равновесия нелинейной системы можно судить по результатам анализа линеаризованной системы:
• если все собственные значения матрицы А имеют отрицательные действительные части, т.е. линеаризованная система устойчива асимптотически, то положение равновесия устойчивое;
78
elib.pstu.ru

•если линеаризованная система неустойчива, то положение равновесия неустойчивое.
•если среди собственных значений (характеристических чисел) матрицы системы имеется хотя бы два мнимых сопряженных значения, для суждения об устойчивости использовать линеаризо-
ванную систему нельзя. Необходимо при разложении функции в ряд использовать нелинейные члены.
Исследование устойчивости нелинейных систем по первому методу Ляпунова имеет недостатки:
•исследуется только устойчивость «в малом»;
•применим только для систем, линеаризуемых в окрестности
положения равновесия.
Применение данного метода рассмотрим на примере с помощью первого метода Ляпунова.
Пример 4.3
Пусть математическое описание системы в форме Коши имеет
вид:
dx1 = − x1 + x1x2 ; dt
dx2 = − x2 + x22 . dt
Определим положение равновесия нелинейной системы, приравняв нулю производные. Получаем, что система имеет два реше-
ния: x11 = 0; x21 = 0 и x12 = 0; x22 = 1 которые являются точками равновесия системы.
Для применения первого метода Ляпунова линеаризуем исходную нелинейную систему разложением в ряд Тейлора в окрестности точек состояния равновесия, в результате чего получим:
ϕ1 (x1, x2 ) ≈ a11∆x1 + a12∆x2 ;
ϕ2 (x1, x2 ) ≈ a21∆x1 + a22∆x2 .
На рис. 4.3 показано пояснение принципа перехода к линеаризованной системе уравнений, где для коэффициентов (переменных)
79
elib.pstu.ru

fji в системе уравнений индекс j – № функции (переменной), а i – № числа состояния равновесия.
Рис. 4.3. Линеаризация в окрестности положения равновесия
Проверку устойчивости выполним для каждого состояния равновесия:
1. Значения коэффициентов линеаризованного уравнения:
a11 |
= |
∂ϕ1 = −1 |
при |
x1 = x11, x2 |
= x21; |
|
|
|
∂x1 |
|
|
|
|
a12 |
= |
∂ϕ1 |
= 0 |
при |
x1 = x11, x2 |
= x21; |
|
|
∂x2 |
|
|
|
|
a21 |
= |
∂ϕ2 |
= 0 |
при |
x1 = x11, x2 |
= x21; |
|
|
∂x1 |
|
|
|
|
a22 |
= |
∂ϕ2 |
= −1 |
при |
x1 = x11, x2 |
= x21. |
|
|
∂x2 |
|
|
|
|
Тогда линеаризованная система уравнений для первого состояния равновесия примет вид:
dx1 = − x1; dt
80
elib.pstu.ru