

Теория автоматического управления. Нелинейные системы
.pdfние линейных систем (расстояние до мнимой оси ближайшего корня характеристического уравнения на комплексной плоскости). Параметр λ0 служит оценкой длительности переходных процессов, не превышающей 3 постоянных времени затухающей экспоненты: tр= 3/ λ0.
Можно утверждать, что нелинейная система обладает затуханием или степенью устойчивости λ0 не меньше заданной, если затухание отклонений процесса от возмущенного (за счет изменения начальных условий) илиневозмущенного происходит быстрее, чем Re−λot:
|
ε (t ) |
|
= |
|
x(t ) − x |
(t ) |
|
≤ Re− λ0t |
(5.9) |
|
|
|
|
||||||
|
|
|
|
|
в |
|
|
|
|
где R = const, зависящая от величины начального возмущения. Для реализации неравенства (5.9) необходимо выполнение ус-
ловия: |
|
limt→∞ ε (t )eλ0t ≤ R. |
(5.10) |
Если R = 0, limt→∞ ε (t )eλ0t = 0, это означает, что ε (t ) |
стремится |
к нулю быстрее, чем e− λ0t . |
|
При переходе к частотным функциям следует учесть в (5.10) произведение оригинала функции на показательную функцию, что требует смещения комплексной переменной в изображении функции на –λ0. Поэтому в формулировке условий абсолютной устойчивости необходимо использовать смещенную частотную функцию линейной части системы W(jω – λ0).
Система обладает степенью устойчивости λ0, если выполняют-
ся условия В.М. Попова |
|
Re(1 + jqω)W(jω – λ0) + 1/k > 0, |
(5.11) |
когда нелинейность имеет кусочно-линейную характеристику, лежащую в секторе (0, k], линейная часть с передаточной функцией W(p) устойчива, q – некоторое положительное число.
Допустимо структурное преобразование системы, когда линейная часть неустойчива или нейтральна. При оценке степени устойчивости вместо (5.11) удобно пользоваться W*(jω – λ0) – смещенной преобразованной частотной характеристикой линейной части.
101
elib.pstu.ru

Рис. 5.7. Определение степени устойчивости по критерию В.М. Попова
Для определения степени устойчивости нелинейной системы нужно построить семейство характеристик W*(jω – λ0) при различных λ0 (рис. 5.7). Степень устойчивости определяется той характеристикой, которая пересекает все прямые Попова с различными наклонами, кроме одной 1/q0, с которой она имеет одну или несколько точек касания. Можно решить обратную задачу определения параметров системы, обеспечивающих степень устойчивости, не меньше заданной.
102
elib.pstu.ru
6.НЕКОТОРЫЕ ВОПРОСЫ СИНТЕЗА НЕЛИНЕЙНЫХ СИСТЕМ
Впроектировании нелинейных автоматических систем имеются существенные особенности. Так, например, в отличие от линейных, они могут иметь несколько состояний устойчивого и неустойчивого равновесия. Области устойчивости определяются не только параметрами систем, но и соотношениями начальных условий. Установившиеся состояния в нелинейных системах могут иметь автоколе-
бательный и равновесный характер. Синтез нелинейных систем в автоколебательных режимах проводится рассмотренными выше методами фазовых траекторий и гармонической линеаризации.
Важным моментом является обеспечение устойчивых равновесных сходящихся процессов, так как нелинейные системы, за исключением специальных, недопускают автоколебательных режимов.
Синтез нелинейных систем, обеспечивающих необходимые показатели качества в равновесных установившихся режимах может проводиться, как и для линейных систем, параметрическим или структурным методами синтеза регуляторов. При параметрическом синтезе нелинейных систем могут быть использованы практически те же методы, что и для анализа их динамических свойств.
Структурный синтез предусматривает введение дополнительных звеньев, при этом в качестве изменяемой могут быть приняты линейная часть или нелинейный элемент систем.
Синтез корректирующих устройств в линейной части системы, изменяющих ее частотную характеристику для обеспечения некоторых показателей качества, может осуществляться как методами синтеза, разработанными для линейных систем, так и с использованием критерия абсолютной устойчивости, по типовым логарифмическим амплитудно-частотным характеристикам и др.
При синтезе систем за счет нелинейной коррекции используются методы изменения статических характеристик нелинейностей, например, введением обратных связей, компенсацией нелинейностей и т.п.
103
elib.pstu.ru
Существующие методы синтеза достаточно просты применительно к системам с минимально-фазовыми линейными звеньями и однозначными статическими нелинейностями.
Наибольшими возможностями обладают методы синтеза, использующие численные методы решения нелинейных дифференциальных уравнений на базе прикладных программ, например, с применением интегральных оценок. Современные машинные методы проектирования систем автоматического управления основаны на применении различных методов оптимизации, принципов построения адаптивных систем.
6.1. Синтез линейных корректирующих устройств по критерию абсолютной устойчивости
По критерию абсолютной устойчивости достаточным условием устойчивости процессов нелинейной системы, если производная нелинейной характеристики заключена в пределах r < dz(x)/dx < k, является расположение приведенной логарифмической амплитуд- но-фазовой частотной характеристики (ЛАФЧХ) линейной части системы k*W(jω) вне A-окружности, где A = k/r.
На рис. 4.9, б приведены А-окружности для исследования систем по критерию абсолютной устойчивости процессов, которые располагаются центрами на отрицательной вещественной полуоси комплексной плоскости и подобны Р-окружностям (круговым диаграммам), используемым для построения ВЧХ замкнутых линейных систем по их АФЧХ в разомкнутом состоянии. У всех Р- и А-окружностей общими являются точки (–1, j0) и точки [Р/(1 – Р), j0] для Р- и (–А, j0) для А- окружностей, откуда получаем связь между индексами ординат ВЧХ и А- окружностей Р = А/(A – 1).
На плоскость круговых диаграмм в логарифмическом масштабе Р = const наносится ЛАФЧХ приведенной линейной части, как показано на рис. 6.1, а.
По заданному граничному значению индекса A-окружности запретной зоны вычисляется индекс P-окружности и на номограмме определяется диапазон частот ω, в пределах которого ЛАФЧХ заходит в эту зону (на рис. 6.1, а заштрихована). Для фиксированных
104
elib.pstu.ru

значений частот определяются L(ω) и φ(ω), которые соответствуют ординатам желаемых ЛЧХ в этом диапазоне частот (рис. 6.1, б). По известной методике синтеза последовательных корректирующих устройств линейных систем находятся структура и параметры корректирующего устройства, обеспечивающего абсолютную устойчивость процессов в системе.
Рис. 6.1. Запретные зоны на плоскости ЛАФЧХ (а) и ЛЧХ (б)
6.2.Синтез линейных корректирующих устройств по показателю колебательности процессов
Данная методика используется при синтезе нелинейных систем с минимально-фазовой линейной частью и наиболее распространенными нелинейностями с однозначными статическими характеристиками типов 1, 2, приведенными в разделе 5.1. В качестве желаемых частотных характеристик используются типовые структуры систем с передаточными функциями вида
W ( p) = |
(1+ T2 p) |
|
pv (1+ T1 p)(1+ T3 p)k . |
(6.1) |
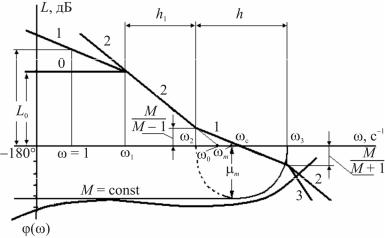
Типовые структуры линейных частей, ЛАЧХ которых приведены на рис. 6.2, с обозначениями наклонов асимптот, кратными – 20 дБ на декаду, могут быть видов:
105
elib.pstu.ru
– 0 – 2 – 1– 2 и 0 – 2 – 1 – 3 (тип А – ν = 0, k = 1; тип Д – ν = 0, k = 2);
– 1 – 2 – 1– 2 и 1 – 2 – 1 – 3 (тип В – ν = 1, k = 1; тип Е – ν = 1, k = 2);
– 2 – 1 – 2 и 2 – 1 – 3 (тип С – ν = 2, k = 1; тип F – ν = 2, k = 2).
Рис. 6.2. Типовые ЛАЧХ линейной части
Применение нелинейностей со статическими характеристиками типов 1 и 2 в сочетании со структурами линейных частей типов А, В, Д и Е позволяет сравнительно просто обеспечить необходимые запасы устойчивости по фазе нелинейных систем в диапазоне средних и малых частот µm (для указанных нелинейностей запретные зоны при М = const показаны на рис. 5.4 контурами 1 – 2 – 3 – 4 – 5 – 6 – 1 и ∞ – 1 – 2 – 3 – 4 – 5 – ∞, соответствующим коэффициентам гармонической линеаризации, изменяющимся соответственно в пределах qmin ≤ q≤ qmax и 0 ≤ q≤ qmax).
Для систем с нелинейностями типа 3 и астатизмом ν = 1 обеспечение требуемого запаса устойчивости оказывается затруднительным (запретная зона ограничена лучами, идущими на комплексной плоскости из начала координат, показанными на рис. 6.3).
106
elib.pstu.ru

Для систем с нелинейностям типа 1 и 2 на рис. 6.3 показано максимально возможное значение запаса устойчивости, определяемое индексом М-окружности, лежащей ближе всех к мнимой оси.
Если линейная часть системы имеет 2-й порядок астатизма, начальный сдвиг по фазе составляет 180°, поэтому в нелинейной системе запас по фазе не может быть обеспечен при любых значениях колебательности М < ∞.
Рис. 6.3. К определению максимального запаса устойчивости
Как известно, в линейных системах требуемый запас устойчивости пофазе обеспечиваетсяза счет протяженности асимптоты ЛАЧХ,
h = |
T2 |
= |
ω3 |
(6.2) |
|
T3 |
ω2 |
||||
|
|
|
вокрестности частоты среза ωс.
Внелинейных системах ограничение накладывается и на длину асимптоты сопряжения низко- и среднечастотных участков ЛАЧХ,
107
elib.pstu.ru

h1 |
= |
T1 |
= |
ω2 . |
(6.3) |
|
T2 |
||||||
|
|
|
ω1 |
|
Максимальное значение запаса устойчивости по фазе, как видно из рис. 6.3, будет при радиусе М-окружности 01N, перпендикулярном лучу-границе запретной зоны 0N. Тогда значение максимального запаса по фазе
µm = arctg |
1 |
(6.4) |
M 2 − 1 . |
Для вычислений параметров желаемой ЛАЧХ используются соотношения в соответствии с рис. 6.3:
OO = C = |
M 2 |
|
, O N = R = |
M |
, ON = A = |
M |
. (6.5) |
M 2 − 1 |
|
|
|||||
1 |
1 |
M 2 − 1 |
M 2 − 1 |
||||
Протяженность среднечастотного участка ЛАЧХ определяется из условия отношений ординат ЛАЧХ при частотах ω2 и ω3 на участке с наклоном 1:
M
M − 1
M
M + 1
= |
ω3 |
= |
M + 1 |
|
= h. |
(6.6) |
|
ω2 |
M − 1 |
||||||
|
|
|
|
||||
Аналогично определяется интервал частот ωс иωm по длине отрезка ON на рис. 6.3, с учетом, что модуль АЧХ при частоте среза определяется как:
M |
|
|
|
|
|
M 2 − 1 |
= |
ωc |
= C. |
(6.7) |
|
1 |
ωm |
||||
|
|
|
Поскольку необходимые и имеющиеся запасы по фазе приравнивались при частоте ωm, среднечастотный участок следует располагать симметрично относительно этой частоты.
Раскрывая соотношение (6.6), можно получить зависимость h1(M), которая, как и соотношение для h, является приближенной.
108
elib.pstu.ru

По имеющимся зависимостям построены графики для определения h и h1(M) (рис. 6.4) для нелинейных систем c различными типовыми ЛАЧХ линейной части и нелинейностями типов 1 и 2.
Приведенные графики позволяют определить по заданному показателю колебательности M значения h и h1 без проведения расчетов и найти значения сопрягающих частот ω1, ω2, ω3.
Рис. 6.4. h, h1(M)-кривые для построения ЛАЧХ
Кроме требований, накладываемых на протяженности h и h1 участков, необходимо определить прохождение низкочастотного участка желаемой ЛАЧХ приведенной линейной части системы. Оценка точности нелинейных систем и определение подъема низкочастотной асимптоты желаемой ЛАЧХ связаны с типом статической характеристики нелинейности в области нуля.
Если статические характеристики нелинейности в начале координат аппроксимируются линейным участком (см. рис. 6.4, 6.5), линейные системы к концу переходного процесса могут рассматриваться как линейные. Поэтому желаемая ЛАЧХ будет иметь ординату L0 = = 20lg kл(kн)o с наклоном «0» для статических систем в области малых частот и при ω = 1 для астатических с ν = 1.
Если статические характеристики нелинейностей имеют зону нечувствительности при любом дальнейшем продолжении, то статическая ошибка системы в основном будет определяться полови-
109
elib.pstu.ru

ной зоны нечувствительности 2b. Переходный процесс устойчивой системы может закончиться при любом значении входной величины сигнала нелинейного элемента внутри этой зоны. В этом случае, используя статическую линеаризацию нелинейности, принимают также k = kл(kн)o.
Рис. 6.5. Линеаризация нелинейностей типов 1 и 2
6.3. Коррекция характеристик нелинейных элементов
Рассмотрим пример коррекции нелинейной системы в MatLab со структурной схемой, представленной на рис. 6.6.
Рис. 6.6. Структурная схема исходной системы
Статическая характеристика нелинейного элемента выбрана наиболее часто встречающегося в реальных системах в виде характеристики пропорциональногозвена снечувствительностью с уравнением:
110
elib.pstu.ru