

Теория автоматического управления. Нелинейные системы
.pdfНа рис. 4.7 показано взаимное расположение АФЧХ линейной части, ее видоизмененной характеристики и прямой Попова для нелинейной системы с абсолютной устойчивостью.
Рис. 4.7. Нелинейная система с абсолютной устойчивостью
Прямая, не пересекающаяся с W*(jω), может быть с любым наклоном.
Если линейная часть нейтральна или неустойчива (в исключениях случая п. 1. теоремы Попова), критерий абсолютной устойчивости непосредственно не может быть применен. В этом случае типовая структурная схема системы преобразуется с приведением линейной части к устойчивой путем введения отрицательных связей: прямой – по отношению к нелинейному звену и обратной –
клинейной части системы с коэффициентом r. Значение коэффициента выбирается так, чтобы линейная часть была устойчивой.
Структурная схема эквивалентной структуры системы приведена на рис. 4.8, б. В этом случае статическая характеристика нелинейной системы по условию критерия Попова (принадлежности
ксектору [0, k]) соответствует принадлежности реальной характеристики к сектору [r, k + r], как показано на рис. 4.8, а. Таким образом, добавление сколь угодно малой обратной связи r→0 приводит задачу к условиям применения абсолютной устойчивости:
Wэ(p) = W(p)/[1 + rW(p)], zэ(x) = z(x) – rx. |
(4.28) |
91
elib.pstu.ru

Рис. 4.8. К применению критерия В.М. Попова при неустойчивой линейной участи:
а– статическая характеристика нелинейности,
б– эквивалентная структурная схема системы
4.5.Абсолютная устойчивость процессов
Абсолютная устойчивость положения равновесия часто оказывается недостаточной для нормального функционирования нелинейной системы при различных задающих и возмущающих воздействиях. Я.З. Цыпкиным найдено достаточное условие абсолютной устойчивости процессов в системах с типовой структурной схемой при ограниченных по длительности («исчезающих») входных воздействиях:
Re{W(jω)/[1 + rW(jω)]} + 1/(k – r) > 0, |
|
r + β ≤ dz(x)/dx ≤ k + β, |
(4.29) |
где r – коэффициент отрицательной обратной связи, обеспечивающий устойчивость линейной части, β – сколь угодно малая положительная величина.
В случае устойчивой линейной части (r = 0) условие (4.29) будет следующим:
ReW(jω) + 1/k = 0, |
(4.30) |
геометрически это означает, что АФЧХ разомкнутой линеаризованной системы должна лежать правее прямой, параллельной мнимой оси на расстоянии –1/к (рис. 4.9, а).
92
elib.pstu.ru

Рис. 4.9. АФЧХ линеаризованной системы с абсолютной устойчивостью процессов
Вводя обозначение k/r=A, из (4.29) получим
Re{kW(jω)/[A + kW(jω)]} + 1/(A – 1) > 0. |
(4.31) |
Представив kW(jω) = U + V и заменяя неравенство (4.31) равенством, получим границу области, внутрь которой не должна входить характеристика kW(jω) линеаризованной системы:
(U + V)/(A + U + jV) + 1/(A – 1) = 0, |
(4.32) |
равенство приводим к виду: |
|
[U + (A + 1)/2]2 + V 2 = [(A – 1)/2]2. |
(4.33) |
Получено уравнение семейства A-окружностей с центрами на отрицательной действительной полуоси, имеющих общую точку касания (–1, j0) (рис. 4.9, б, в).
При A = ∞ (при k = ∞ или r = 0) окружность обращается в вертикальную прямую, и если при этом условие абсолютной устойчивости выполняется (АФЧХ расположена правее линии A = ∞), то оно выполняется для любого А.
При А = 1 окружность вырождается в точку (–1, j0), и доста-
точное условие абсолютной устойчивости нелинейной системы
переходит в необходимое и достаточное условие устойчивости
линейной системы.
93
elib.pstu.ru
5.ОЦЕНКА КАЧЕСТВА ПРОЦЕССОВ
ВНЕЛИНЕЙНЫХ СИСТЕМАХ
Различают прямые и косвенные методы анализа качества нелинейных систем. К прямым относятся методы, основанные на построении исследуемого процесса тем или иным способом, например, численное решение дифференциального уравнения нелинейной системы, метод припасовывания (кусочно-линейная аппроксимация нелинейности), оценка влияния нелинейности на показатели линейной системы.
Численные методы решения являются универсальным методом исследования качества и могут быть применены к любым нелинейным системам для решения их дифференциальных уравнений в разностной форме.
Метод припасовывания применяется в случае, если статическая характеристика нелинейного элемента аппроксимируется ломаной линией, и поведение такой системы описывается системой линейных дифференциальных уравнений. Переходный процесс суммируется из отдельных участков, причем конечные значения предыдущего решения являются начальными для последующего. Если линейная часть является системой второго порядка, припасовывание решений проводится на фазовой плоскости.
Оценка влияния нелинейности на показатели качества линейной системы проводится по разнице динамических процессов в нелинейной системе и близкой к ней линейной системе, получаемой путем замены нелинейной характеристики на линейную. В качестве показателя близостимогутбытьиспользованыинтегральныеоценкикачества.
Косвенные методы оперируют с показателями качества, связанными с характером процессов управления.
Из косвенных можно отметить:
–частотные методы, основанные на оценке показателя колебательности системы, запасов устойчивости по амплитуде и фазе, частоты среза;
–метод, основанный на применении критерия абсолютной устойчивости.
94
elib.pstu.ru

5.1. Оценка качества переходных процессов по показателю колебательности
В инженерной практике широко используется методика анализа и синтеза нелинейных систем, разработанная И.П. Пальтовым, с применением показателя колебательности.
Как известно, для определения показателя колебательности линейных систем по их АФЧХ используется семейство М-окружностей, являющихся линиями равных значений (М = const) колебательности, определяемые как отношение максимального и начального значений
ординат АЧХ замкнутой системы М = [Aз(ω)]max/Aз(0). На рис. 5.1 показан запас устойчивости по фазе µ линейной системы, имеющей ко-
лебательность, соответствующую индексу М-окружности, которой касается АФЧХ системы. Следовательно, обеспечение заданного показателя колебательности М в линейной системе связано с требованием незахождения АФЧХ разомкнутой линейной системы в «запретную зону», ограниченную М-ок- ружностью. Запретная зона с максимальной колебательностью, отображаемая М-окружностью, на рис. 5.2 показана на плоскости ЛЧХ.
Рис. 5.2. Запас устойчивости по фазе на плоскости ЛЧХ
95
elib.pstu.ru
Аналогично определяется показатель колебательности гармонически линеаризованных нелинейных систем. Комплексная частотная функция такой системы будет следующей:
W(jω, a) = Wл(jω)Wн(a)/[1 + Wл(jω)Wн(a)] = |
|
= Wл(jω)/[J(a) + Wл(jω)], |
(5.1) |
где Wл(jω) = U(ω) + jV(ω),
J(a) = W–1н(а) = [q(a) + jq′(a)]–1 = r(a) + jr′(a)
– это комплексные частотная функция линейной части и обратная функция нелинейного элемента в зависимости от относительной амплитуды линеаризации a = A/x для характерного параметра нелинейности (зоны нечувствительности, насыщения и т.п.).
По аналогии с линейными системами показатель колебательности
Mmax = |W(jω, a)|max при |W(0)| = 1. |
(5.2) |
Уравнение линий равных значений показателя колебательно-
сти M = const
|
|
M = |Wл(jω)|/|J(a) + Wл(jω)|, |
|
|
(5.3) |
|||||||||||
после преобразования которого с учетом (5.1) получим |
||||||||||||||||
|
rM 2 2 |
|
|
r'M 2 2 |
|
(r2 |
+ r'2 )M 2 |
|||||||||
U + |
|
|
+ |
V + |
|
|
|
|
= |
|
( |
|
|
− ) |
2 , |
|
2 |
|
2 |
|
|
|
|
||||||||||
|
M − 1 |
|
|
M − 1 |
|
|
M 2 |
|
||||||||
|
|
|
|
1 |
|
|||||||||||
|
|
r = |
|
q |
, r' = |
|
q' |
|
, |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||||
|
|
q2 + q'2 |
q2 + q'2 |
|
|
|
|
|||||||||
|
|
(U − U0 )2 + (V − V0 )2 |
= R2 . |
|
|
(5.4) |
||||||||||
Линии М = const на плоскости АФЧХ линейной части описываются окружностями, смещенными по осям координат на U0 и V0, огибающая которых является границей запретной зоны для АФЧХ линейной части (рис. 5.3).
96
elib.pstu.ru
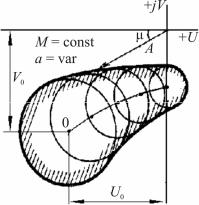
Рис. 5.3. Запретная зона для АФЧХ линейной части
По сравнению с линейными системами запретная зона деформируется за счет изменения коэффициента гармонической линеаризации q(a) и q′(a) при изменении амплитуды периодического сигнала на входе нелинейного элемента.
Построение запретных зон и анализ качества упрощаются для систем с однозначными нечетно-симметричными нелинейностями. В этом случае q′(a) = 0 и система уравнений (5.4) принимает вид:
|
|
|
|
|
rM 2 2 |
|
|
r2 M 2 |
|
|
|
||||||||||
|
U + |
|
|
|
|
|
|
+ V 2 = |
|
|
|
|
|
|
|
|
|
, |
|
||
|
|
|
|
2 |
|
( |
|
|
|
|
− |
) |
2 |
||||||||
|
|
|
|
M − 1 |
|
|
M |
2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||||||
|
|
|
|
(U − U0 )2 + V 2 |
= R2 , |
|
|
|
(5.5) |
||||||||||||
U |
|
= − |
1 |
|
|
M 2 |
, |
R = |
1 |
|
|
M |
. |
||||||||
0 |
|
|
|
|
|
|
|
||||||||||||||
|
|
q M 2 − 1 |
|
|
|
q M 2 − 1 |
|||||||||||||||
Максимальный запас по фазе µmax в данном случае определится по соотношениям (5.5) и рис. 5.3 как
µmax = arcsin(R/U0) = arcsin(1/M) |
(5.6) |
и определяется только показателем колебательности, а также совпадает с максимальным запасом по фазе линейных систем.
97
elib.pstu.ru
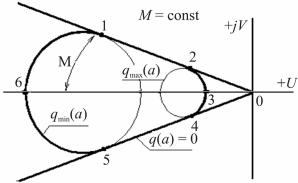
При построении запретных зон для АФЧХ линейной части системы достаточно провести окружности с центрами на действительной оси для максимального и минимального значений коэффициента гармонической линеаризации, а затем провести к ним касательные. На рис. 5.4 приведены границы запретных зон М = const, в которые не должна заходить АФЧХ линейной части системы, включающей типовые нелинейности.
Рис. 5.4. Запретные зоны М = const для АФЧХ линейной части
Границы запретных зон на рис.5.4 соответствуют значениям q(a) типовых нелинейностей (линии приводятся обозначениями точек):
1.Область, ограниченная лучами, идущими из начала координат, соответствует идеальному двухпозиционному реле (qmax = ∞).
2.Область ∞ – 1 – 2 – 3 – 4 – 5 – ∞ соответствует нелинейностям типа «идеальное трехпозиционное реле», «нечувствительность», «ограничение», «нечувствительность с ограничением».
3.Область 1 – 2 – 3 – 4 – 5 – 6 соответствует нелинейным элементам с переменным коэффициентом усиления в ограниченных пределах.
Вышеуказанные запретные зоны 3 типов приведены на рис. 5.5 на плоскости ЛЧХ.
Применение показателя колебательности в нелинейных системах позволяет оценивать возможности появления периодических режимов и определить автоколебания.
98
elib.pstu.ru
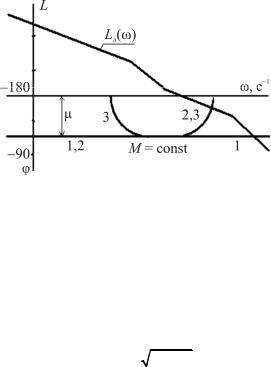
Рис. 5.5. Запретные зоны М = const на плоскости ЛЧХ
Пусть M→ ∞, тогда из (5.4) имеем:
|
|
|
|
|
rM 2 |
|
|
|
|
|
|
|
|
|
q(a) |
|
|
|
|
|
|||
lim U |
0 |
= lim |
− |
|
|
|
|
|
|
|
|
= −r = − |
|
|
|
|
|
|
|
, |
|
||
|
M |
2 |
|
|
|
|
q |
2 |
|
2 |
|
|
|
||||||||||
M →∞ |
|
M →∞ |
|
|
|
|
− 1 |
|
|
|
(a) + q' (a) |
|
|||||||||||
|
|
|
|
|
r'M 2 |
|
|
|
|
|
|
|
|
|
q'(a) |
|
|
|
|
|
|||
lim V0 |
= lim |
− |
|
|
|
|
|
|
|
|
|
= −r' = − |
|
|
|
|
|
|
|
, |
(5.7) |
||
M |
2 |
|
− |
|
|
|
|
q |
2 |
(a) + q' |
2 |
|
|||||||||||
M →∞ |
|
M →∞ |
|
|
|
1 |
|
|
|
|
(a) |
|
|||||||||||
|
|
lim R = lim |
|
M |
r2 + r'2 |
|
= 0. |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
M 2 − 1 |
|
|
|
|
|
|
|||||||||||
|
|
M →∞ |
|
|
M |
→∞ |
|
|
|
|
|
|
|
|
|
||||||||
Из полученных уравнений следует, что при M → ∞ линии M = const вырождаются в обращенную отрицательную характеристику нелинейности на комплексной плоскости,
– J(a) = –Wн(a) = – r(a) – r′(a). |
(5.8) |
На рис. 5.6 показаны запретные зоны для АФЧХ линейной части системы с однозначными нечетно-симметричными нелинейностями типа 2 (r′(a) = 0).
АФЧХ линейной части, касающаяся запретной зоны в т. В, не охватывает точку (–1, j0) комплексной плоскости, что соответствует равновесно сходящемуся переходному процессу в системе с показателем колебательности М1. При этом система обладает запасом устойчивости по фазе µ. Если при заданных параметрах АФЧХ линейной части охватывает точку (–1, j0) и пересекает характеристи-
99
elib.pstu.ru

ку –J(a) (т. А), в системе возможны 2 режима автоколебаний с частотой ωА и амплитудами с относительными значениями a1A и a2A, причем a1A < a2A. Периодический режим с амплитудой a2A соответствует устойчивым автоколебаниям, другой – неустойчивым (неустойчивому предельному циклу).
Рис. 5.6. К определению устойчивости нелинейной системы
Если у устойчивой линейной части системы АФЧХ располагается правее линии М = 1, переходный процесс в системе имеет монотонно сходящийся характер.
Аналогично выполняется оценка качества процессов и при наличии в системе двузначных нелинейностей, при этом несколько усложняется процесс построения запретных зон M = const, показанных на рис. 5.3.
5.2.Оценка качества процессов
спомощью критерия абсолютной устойчивости
Для оценки качества процессов в нелинейных системах используется также критерий абсолютной устойчивости. В этом случае используется понятие степени устойчивости λ0, введенное в исследова-
100
elib.pstu.ru