

Теория автоматического управления. Нелинейные системы
.pdfЭто предположение, называемое гипотезой фильтра, является необходимым условием применения метода гармонической линеаризации. Поскольку высшие гармоники по амплитуде обычно меньше, чем первая гармоника, и если линейная часть САУ узкополосная и в ней отсутствуют резонансные звенья, то во многих практических случаях гипотезафильтра выполняется, т.е. |W(jωa)| >>|W(jkωa)| при k >1.
Для приближённых расчётов условие гипотезы фильтра может быть сформулировано так: наклон ЛАЧХ линейной части должен быть по крайней мере от –20 до –40 дБ/дек на частоте автоколебаний ωа и должны быть выполнены неравенства:
– при наклоне ЛАЧХ –20 дБ/дек
|
Wл ( j2ωa ) |
|
|
≤ |
1 |
, |
|
|
Wл ( j3ωa ) |
|
|
≤ |
1 |
, |
||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Wл ( jωa ) |
|
|
|
2 |
|
|
|
Wл ( jωa ) |
|
|
|
3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
– и при наклоне ЛАЧХ –40 дБ/дек
|
Wл ( j2ωa ) |
|
|
≤ |
1 |
, |
|
|
Wл ( j3ωa ) |
|
|
≤ |
1 |
. |
(3.1) |
||||||
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Wл ( jωa ) |
|
|
|
4 |
|
|
|
|
Wл ( jωa ) |
|
|
|
|
9 |
|||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Поскольку данный метод является приближённым, то полученные результаты будут близки к истине только при выполнении определённых допущений:
1.Нелинейная система должна содержать только один нелинейный элемент с нечетно-симметричной (или приведенной к ней) статической характеристикой.
2.Линейная часть системы должна представлять собой фильтр низких частот, ослабляющий высшие гармоники.
3.Нелинейная система является автономной.
3.2. Комплексный коэффициент усиления (передачи) нелинейного элемента
Нелинейный элемент (НЭ) при действии на вход гармонического сигнала может быть описан комплексным коэффициентом усиления, зависящим от амплитуды входного сигнала.
51
elib.pstu.ru
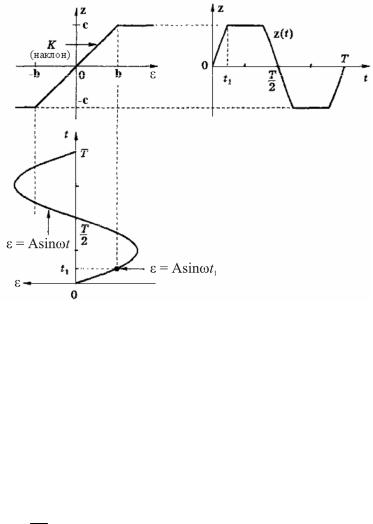
Будем рассматривать безынерционные нелинейные элементы с нечётно-симметричными статическими характеристиками (например, на рис. 3.2).
Рис. 3.2. Преобразование входного сигнала нелинейным элементом
Пусть на вход нелинейного элемента подаётся гармонический
сигнал ε(t) = A·sinωt (см. рис. 3.2), тогда выходная функция z(t) = = F(A·sinωt) является периодической (негармонической).
Разложим z(t) в ряд Фурье:
∞ |
∞ |
|
z(t) = F0 + ∑Bv sin vωt + ∑Dv cos vωt, |
(3.2) |
|
ν=1 |
v=1 |
|
где при усреднении по фазе и замене ωt = ψ
2π
F0 = 21π ∫0 F(Asin ψ)dψ – постоянная составляющая выходной функции,
52
elib.pstu.ru

Bv |
= |
1 |
|
2∫π F(Asin ψ)sin vψdψ |
– |
амплитуда |
синфазной состав- |
|
|
|
|||||||
|
|
π 0 |
|
|
|
|||
ляющей z(t), |
|
|
|
|||||
Dv |
= |
1 |
2∫π F(Asin ψ)cosvψdψ |
– |
амплитуда |
квадратурной со- |
||
|
||||||||
|
|
|
π 0 |
|
|
|
||
ставляющей z(t).
При условии выполнения гипотезы фильтра и симметричности статической характеристики НЭ ( F0 = 0 ) его выходной сигнал может быть представлен своей первой гармоникой:
|
z(t) ≈ B1 sin ωt + D 1 cosωt = C1 sin(ωt + θ) , |
(3.3) |
||
где C1 |
= B12 + D12 , θ = arctg |
D1 |
. |
|
|
|
|||
|
|
B1 |
|
|
Модуль и фазовый сдвиг комплексной функции, являясь соответственно амплитудой первой гармоники периодического выходного сигнала C1(A) и его сдвига по фазе θ(A), зависят от амплитуды входного гармонического сигнала.
Сделав замену в (3.3) sin ωt = ε(t) , |
|
|
|
& |
|
|
|
|||||||||||||||||
cosωt = |
ε(t) |
|
, |
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||||
получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
Aω |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
B |
|
|
|
|
|
D |
|
|
|
& |
|
|
q, (A) |
|
|
|
|||||
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
z(t) = |
|
ε(t) + |
|
|
|
|
|
ε(t) |
≈ q(A) + |
|
|
p ε(t) , |
(3.4) |
|||||||||
|
|
Aω |
ω |
|||||||||||||||||||||
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где p |
d |
– оператор дифференцирования по времени, а |
|
|||||||||||||||||||||
|
|
|||||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q(A) = |
B1 |
|
= |
|
|
1 |
|
2∫π F(Asin ψ)sin ψdψ, |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
A |
|
|
πA 0 |
|
|
|
|
|
|
|
|
|||||||
|
|
q'(A) = |
D1 |
|
= |
|
|
|
1 |
|
|
2∫π F(Asin ψ)cosψdψ |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
A |
|
|
|
πA 0 |
|
|
|
|
|
|
|
|
||||||
– это коэффициенты гармонической линеаризации.
53
elib.pstu.ru
Преобразования по Лапласу выходной функции и входного воздействия имеют вид:
Z ( p) = B1 |
|
|
ω |
|
+ D1 |
|
|
p |
= |
|
|
ω |
|
B1 + D1 |
p |
|
, |
|
p |
2 |
+ ω |
2 |
p |
2 |
2 |
p |
2 |
|
2 |
|
|||||||
|
|
|
|
|
+ ω |
|
+ ω |
|
ω |
|
||||||||
|
|
|
|
|
E( p) = A |
|
ω |
|
, |
|
|
|
(3.5) |
|||||
|
|
|
|
|
p2 + ω2 |
|
|
|
||||||||||
где р – оператор Лапласа.
По аналогии с линейным звеном свойства нелинейного элемента можно представить передаточным коэффициентом, назы-
ваемым эквивалентным комплексным передаточным коэффи-
циентом НЭ (эквивалентной передаточной функцией, коэффициентом гармонической линеаризации).
Определим эквивалентную передаточную функцию:
WH |
(A, p) = |
Z ( p) |
= |
B1 |
+ |
D1 |
p = q(A) + q'(A) |
1 |
p . |
(3.6) |
E( p) |
|
|
ω |
|||||||
|
|
|
A Aω |
|
|
|
||||
По преобразованию Фурье (при p = jω) получим эквивалентную частотную функцию, которая зависит от амплитуды входного сигнала:
WH (A) = q(A) + jq'(A) . |
(3.7) |
Таким образом, нелинейный элемент может быть заменен линейным. Этот прием получил название гармонической линеари-
зации нелинейностей.
Если статическая характеристика НЭ нечетно-симметричная, то q'(A) = 0 , что показывает отсутствие фазового сдвига входного и
выходного сигналов.
3.3. Вычисление комплексных передаточных коэффициентов нелинейных элементов
В общем случае для динамических нелинейных элементов выходной установившийся периодический сигнал при гармоническом входном воздействии с конкретными значениями A и ω определя-
54
elib.pstu.ru

ется путём численного решения дифференциального уравнения. Затем находят значения коэффициентов гармонической линеаризации нелинейного элемента (приведены в табл. 3.1) по формулам усреднения по времени:
q(A,ω) = |
2 |
|
T∫ F(Asin ωt)sin ωtdt ; |
(3.8) |
||
TA |
||||||
|
0 |
|
||||
|
|
|
|
|
||
q'(A,ω) = |
2 |
T∫ F(Asin ωt)cosωtdt. |
|
|||
TA |
|
|||||
|
|
0 |
|
|||
|
|
|
|
|
||
Эти формулы означают, что гармоническая линеаризация даёт усреднённые за период свойства нелинейного элемента по преобразованию гармонического сигнала. Повторяя эту операцию для разных ω, можно получить таблицу значений коэффициента гармонической линеаризации.
В частном случае безынерционных нелинейных элементов коэффициенты гармонической линеаризации от частоты ω не зависят. Эквивалентная передаточная функция, имеющая выражение
WH (A, p) = q(A) + |
p |
|
ω q'(A), |
(3.9) |
является функцией только амплитуды входных колебаний вида
WH (A) = q(A) + jq'(A) = RH (A)exp[ jθH (A)],
модуль и аргумент которой вычисляются как
RH |
(A) = q2 (A) + [q'(A)]2 , θH ( A) = аrctg |
q'(A) |
. |
(3.10) |
|
||||
|
|
q(A) |
|
|
Ниже приведен пример вычисления коэффициента гармонической линеаризации безынерционного элемента со статической характеристикой идеального двухпозиционного реле.
55
elib.pstu.ru

Рис. 3.3. Преобразование входного синусоидального сигнала идеальным релейным элементом
Вычислим коэффициенты гармонической линеаризации:
|
1 |
π |
2π |
|
|
C |
(− cosψ |
q(A) = |
|
∫C sin ψdψ − ∫ |
C sinψdψ |
= |
|
||
|
πA |
||||||
|
πA 0 |
π |
|
|
|
||
|
1 |
π |
2π |
|
|
C |
(sin ψ |
q'(A) = |
|
∫C cosψdψ − ∫ C cosψdψ |
= |
|
|||
|
πA |
||||||
|
πA 0 |
π |
|
|
|
||
|
|
|
WH (A) = |
4C |
. |
|
|
|
|
|
|
|
|
||
|
|
|
πA |
|
|
||
0π + cosψ 2ππ )= 4πCA ,
0π − sin ψ 2ππ )= 0 ,
Эквивалентная передаточная функция идеального реле равна действительной части WН (А) = q(A) , а фазовый сдвиг θH (A) = 0 ,
т.е. фаза первой гармонической составляющей выхода совпадает с фазой входа (рис. 3.3).
График эквивалентной амплитудной характеристики показан на рис. 3.4, из которого видно, что малые по амплитуде сигналы проходят с большим усилением, а большие – с малым (дискриминация сигналов по уровню.
56
elib.pstu.ru

Рис. 3.4. Отображение модели идеального релейного элемента
В табл. 3.1 приведены коэффициенты гармонической линеаризации типовых безынерционных нелинейных элементов.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3 . 1 |
||
|
|
Коэффициенты гармонической линеаризации |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
№ |
Нелинейный элемент |
|
|
|
|
|
|
|
|
Коэффициенты |
|
|||||||||
|
|
|
гармонической линеаризации |
|||||||||||||||||
|
|
|
|
|
|
|||||||||||||||
п/п |
Название |
Статическая |
|
|
|
|
q(A) |
|
|
|
|
|
|
q'(A) |
||||||
|
характеристика |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Идеаль- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ный двух- |
|
|
|
|
|
|
|
|
4C |
|
|
|
|
|
|
|
|||
1 |
позици- |
|
|
|
|
|
q = |
|
|
|
|
|
|
|
0 |
|||||
|
онный |
|
|
|
|
|
|
|
|
|
πA |
|
|
|
|
|
||||
|
релейный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
элемент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Идеаль- |
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
||
|
ный |
трех- |
|
|
|
|
4C |
|
|
A ≥ b ; |
|
|
|
|||||||
|
позици- |
|
q = |
|
1− |
|
|
|
, |
|
|
|
||||||||
2 |
|
πA |
|
A2 |
|
|
0 |
|||||||||||||
онный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
релейный |
|
|
|
|
q = 0 , |
A < b |
|
|
|
||||||||||
|
элемент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зона |
на- |
|
|
2 |
|
|
|
b |
|
|
b |
|
b |
|
|
|
|||
|
|
q = k |
|
arcsin |
|
+ |
|
|
|
1− ( |
|
)2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
3 |
сыщения |
|
|
|
|
|
|
A |
|
|
A |
|
A |
|
|
0 |
||||
|
|
π |
|
|
|
|
|
|
|
|||||||||||
|
(ограни- |
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
||||
|
чение) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
A ≥ b |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
57 |
elib.pstu.ru

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончание табл. 3 . 1 |
|||||||||||||||||||||||||||||||||||||||||
№ |
Нелинейный элемент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Коэффициенты |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
гармонической линеаризации |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
п/п |
Название |
Статическая |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q(A) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q'(A) |
|
|
|
|
|||||||||||||||
|
характеристика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Элемент с |
|
|
|
|
|
|
|
|
|
|
2k |
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
b |
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
зоной |
не- |
|
q = k − |
|
|
|
|
|
arcsin |
|
|
|
|
|
+ |
|
|
|
1− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
4 |
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
A |
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
0 |
|
|
|
|
|
|||||||||||||||
чувстви- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
тельности |
|
|
|
|
|
|
|
, A ≥ b ; |
|
|
|
q = 0 , |
|
|
|
A < b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
Элемент с |
|
|
|
|
= |
|
2k |
|
|
|
|
|
|
|
|
|
|
hb |
|
− arcsin |
b |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
q |
|
|
|
|
|
|
arcsin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
зоной |
не- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
5 |
чувстви- |
|
|
|
hb |
|
|
|
|
|
|
|
|
hb |
2 |
|
|
|
|
|
b |
|
|
|
|
|
|
|
b |
|
|
2 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
||||||||||||||||||||
тельности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
+ |
|
|
|
|
|
1 |
|
− |
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
1− |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
A |
|
|
|
|
|
A |
|
|
|
|
|
A |
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
и ограни- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
чением |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A > hb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Идеаль- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
' |
= − |
4Cb |
|
|
|
|||||
|
ный двух- |
|
|
|
|
|
q = |
|
|
4C |
|
1− |
b2 |
|
|
|
|
|
A ≥ b ; |
|
|
|
|
|
|
|
|
|
πA2 |
, |
|
|
|||||||||||||||||||||||||||||||||
6 |
позици- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A ≥ b ; |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
πA |
|
A2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
онный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q = 0 , |
|
A < b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q' = 0 , |
|
|
|
||||||||||||||||||||||||||||
|
релейный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
элемент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A < b |
|
|
|
|
||||
|
Реальный |
|
|
|
|
|
|
2C |
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
|
|
|
|
|
r2b2 |
|
|
|
' |
|
|
|
|
2Cb(1 − r) |
|||||||||||||||||||||||||
|
трехпози- |
|
q = |
|
|
|
|
|
|
|
|
1 |
− |
|
|
|
|
|
|
+ |
|
|
1− |
|
|
|
|
|
|
|
|
, |
|
q |
|
= − |
|
|
|
|
|
|
|
, |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
πA |
2 |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
A2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
πA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
7 |
ционный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A ≥ b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A ≥ b ; |
q |
' |
= 0 , |
||||||||||||||||||||||
|
релейный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
элемент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q = 0 , |
|
A < b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A < b |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 − |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
arcsin |
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
q = |
|
|
|
1 |
− |
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q ' |
= |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
− |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 − |
A |
|
|
|
|
|
|
|
|
4kb(A − b) |
||||||||||||||||||||||||||
8 |
Люфт |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= − |
|
|
|
|
|
|
|
|
, |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
+ |
|
|
|
|
|
|
b |
cos arcsin |
|
|
|
|
|
|
|
b |
|
|
, |
|
|
|
|
|
|
πA |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
A > b |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A > b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нелиней- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
10 |
ный одно- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q = k + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q' = 0 |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
πA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
значный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
элемент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
58
elib.pstu.ru
3.4. Определение параметров автоколебаний в системе с одним нелинейным элементом
Рассмотрим нелинейную систему, структурная схема которой приведена на рис. 3.1. В системе выделены линейная часть и нелинейный элемент с уравнением статической характеристики) с уравнениями:
D(p)y = – K(p)z,
z = f(y). (3.11)
Найдем решение системы при u(t) = 0 в форме y = A·sin(Ωt + θ), где в общем случае A и θ могут быть медленно изменяющимися функциями времени, Ω – постоянная.
Тогда уравнение системы принимает вид
D(p)[(Asinθ)cosΩt + (Acosθ)sinΩt] +
+ K(p)·f[(Asinθ)cosΩt + (Acosθ)sinΩt] = 0.
Пусть A и θ меняются настолько медленно в сравнении с Ωt, что за один период их можно считать постоянными, равными среднему значению, тогда
f(y) ≈ qAsin(Ωt + θ) + q′Acos(Ωt + θ). |
(3.12) |
Применив теорему смещения к уравнению системы, получим:
sinΩt{D1(p)(Acosθ) – D2(p)(Asinθ) + K1(p)[q(A cosθ) –
–q′(Asinθ)] – K2(p)[q(Asinθ) + q′(Acosθ)]} +
+cosΩt {D2(p)(Acosθ) + D1(p)(Asinθ) + K2(p)[q(Acosθ) –
– q′(Asinθ)] + K1(p)[q(Asinθ) + q′(Acosθ)]} = 0, |
(3.13) |
где sin(Ωt + θ) = sinΩtcosθ + cosΩtsinθ, cos(Ωt + θ) = sinΩtsinθ – cosΩtcosθ,
D1(p) = [D(p + jω) + D(p – jω)] = ReD(p + jω), D2(p) = [D(p + jω) – D(p – jω)] = ImD(p + jω), K1(p) = [K(p + jω) + K(p – jω)] = ReK(p + jω), K2(p) = [K(p + jω) – K(p – jω)] = ReK(p + jω).
59
elib.pstu.ru
Если установившиеся автоколебания существуют, то Asinθ
иAcosθ с течением времени становятся постоянными величинами,
иони должны определяться из уравнений статики, положив D(p) = 0
иK(p) = 0. Приравнивая нулю множители при sin(Ωt + θ) и cos(Ωt + θ) в уравнении (3.13), получим систему уравнений:
D1(0) + qK1(0) – q′K2(0) |
= 0, |
|
D2(0) + qK2(0) +q′K1(0) |
= 0, |
(3.14) |
решение которой даст значения амплитуды А и частоты Ω автоколебаний.
Аналитическое решение системы уравнений (3.14) удается решить практически для несложных систем невысокого порядка
спростейшими нелинейностями.
Всоответствии с методикой, предложенной Е.П. Поповым, продифференцируем y и подставим cos(Ωt + θ) в (3.12):
dy/dt = ΩAcos(Ωt + θ),
z = qy + (q′/Ω)dy/dt. |
(3.15) |
Получили уравнение системы для основной гармоники, в котором q и q′ являются нелинейными функциями А, которые для каждого установившегося режима автоколебаний рассматриваются как постоянные величины.
Подставив (3.15) в (3.11), получаем уравнение гармонически линеаризованной системы:
{D(p) + [q + (q′p/Ω)K(p)}y = 0. |
(3.16) |
Решая (3.16) из условия, что существует периодическое решение характеристического уравнения системы (p = jΩ), определим амплитуду А и частоту Ω автоколебаний из системы уравнений:
D1(Ω) + q(A)K1(Ω) = 0, |
|
D2(Ω) + q(A)K2(Ω) = 0. |
(3.17) |
60
elib.pstu.ru