

Теория автоматического управления. Нелинейные системы
.pdf1.5. Структурное преобразование нелинейной САУ к типовой
Преобразованием структурных схем можно привести нелинейную систему к системе с типовой структурой, а также заменой неоднозначных характеристик эквивалентной схемой из однозначной нелинейности в сочетании с линейными элементами обеспечить снижение порядка дифференциального уравнения системы.
На рис. 1.16 показаны этапы преобразования сложной структурной схемы нелинейной системы с использованием рассмотренных правил эквивалентности преобразований.
Рис.1.16. Пример преобразования структуры нелинейной системы
В результате преобразования получена «типовая» структурная схема с единичной отрицательной обратной связью и нелинейным элементом после элемента сравнения.
Влияние нелинейных элементов на характеристики нелинейных систем можно уменьшить:
1)улучшением конструкции функциональных элементов;
2)изменением параметров и структуры линейной части;
21
elib.pstu.ru
3)введением дополнительных линейных обратных связей (охватом нелинейных элементов линейной обратной связью);
4)компенсацией влияния нелинейностей (применением специальных компенсирующих нелинейных элементов, обеспечивающих линеаризацию системы);
5)введением дополнительных сигналов управления по отклонению;
6)применением вибрационной линеаризации нелинейностей.
22
elib.pstu.ru

2. МЕТОД ФАЗОВЫХ ТРАЕКТОРИЙ
2.1. Основные понятия о методе
Метод фазовых траекторий представляет собой графоаналитический способ исследования нелинейных систем, сущность которого заключается в описании поведения системы при помощи наглядных геометрических представлений – фазовых портретов. Метод дает возможность получать наглядную и точную картину всей совокупности переходных процессов при любых начальных условиях для свободных колебаний.
Динамика нелинейных систем с выходной переменной в общем случае описывается с помощью нелинейного дифференциального уравнения
d n x |
= |
|
dx |
|
d n−1x |
|
|||
|
|
f x, |
|
,..., |
|
|
. |
(2.1) |
|
dt |
n |
dt |
dt |
n−1 |
|||||
|
|
|
|
|
|
|
|||
Данное уравнение можно представить в виде системы дифференциальных уравнений первого порядка:
x(t) = x1 (t), |
|
||||
|
|
|
|
|
|
|
dx1 |
|
|
= x2 , |
|
|
|
||||
dt |
|
|
|
|
|
|
|
|
|
|
|
dx2 |
|
|
= x3 , |
|
|
|
|
|
|
(2.2) |
|
|
|
||||
dt |
|
|
|
|
|
............. |
|
||||
|
|
|
|
|
|
|
dxn |
|
|
= f (x1, x2 ,..., xn−1 ). |
|
|
|
|
|
||
dt |
|
|
|
|
|
Переменные xi (i =1,n) называются фазовыми переменными со-
стояния. Мгновенное состояние системы и ее дальнейшее поведение однозначно определены, если в некоторый момент времени t = t j из-
23
elib.pstu.ru
вестны значения всех n переменных xi . Эти значения можно рассматривать как координаты точек (x1 , x2 ,Kxn ) в n-мерном пространстве, которое называется фазовым пространством.
Точку с координатами (x1, x2 ,Kxn ) называют изображающей
точкой, а линию, по которой она перемещается при изменении состояния системы, – фазовой траекторией. Известно, что конкретному начальному состоянию системы (x1 (0), x2 (0),Kxn (0)) соответ-
ствует единственное решение системы (2.2) и, следовательно, единственная фазовая траектория. Поэтому множеству различных начальных условий соответствует семейство фазовых траекторий, которое называется фазовым портретом. Построение фазового портрета дает наглядное представление о поведении системы, в том числе предоставляет возможность определить режим автоколебаний.
Для систем высоких порядков фазовые портреты отображаются в многомерном пространстве, а для систем третьего и второго порядков – соответственно в пространстве и плоскости, что определяет практическую область применения данного метода.
Метод фазового пространства наиболее удобен в силу наглядности и простоты представления для анализа систем второго порядка, так как их фазовые траектории располагаются в фазовой плоскости переменных x1 и x2. Фазовый портрет этих систем можно построить непосредственно по дифференциальному уравнению, нерешая его.
Пусть описание системы представлено в виде нелинейного дифференциального уравнения второго порядка:
d 2 |
x |
= f x, |
dx |
. |
(2.3) |
dt |
2 |
dt |
|||
|
|
|
|
Данное уравнение можно представить в виде системы двух дифференциальных уравнений первого порядка
|
dx1 |
|
= x , |
|
|
|
|||
dt |
2 |
|
||
|
|
|
(2.4) |
|
dx2 |
|
= f2 (x1 |
, x2 ), |
|
|
|
|
||
dt |
|
|
|
|
24
elib.pstu.ru

где x1 = x – отклонение выходной величины от установившегося значения. В качестве переменной x2 принята производная пере-
менной: x2 = dx1 . Разделив второе уравнение системы (2.4) на пер- dt
вое, можно получить уравнение фазовых траекторий в дифференциальной форме:
dx2 |
= |
f2 (x1, x2 ) |
. |
(2.5) |
|
|
|||
dx1 |
|
x2 |
|
|
Решение данного дифференциального уравнения имеет уравнение фазовых траекторий в явном виде:
x2 = F(x1 ) + C0 , |
(2.6) |
где C0 – постоянная интегрирования, зависящая от начальных ус-
ловий.
Из (2.6) видно, что каждой совокупности начальных условий x1(0), x2(0) соответствует свое решение и своя фазовая траектория.
2.2.Свойства фазовой плоскости
1.Из системы уравнений (2.4) следует, что в верхней полуплоскости изображающая точка движется всегда слева направо,
поскольку при x2 |
= |
dx1 |
> 0 |
переменная |
x1 во времени возрастает. |
|||
|
||||||||
|
|
dt |
|
|
|
|
|
|
В нижней полуплоскости |
( x2 |
= |
dx1 |
< 0 ) |
переменная x1 убывает |
|||
|
||||||||
|
|
|
|
|
|
dt |
|
|
и движение по фазовой траектории происходит справа налево.
2. При x2 |
= 0 величина |
dx2 |
= |
f2 (x1, x2 ) |
→ ∞ (за исключением |
dx1 |
|
||||
|
|
|
x2 |
||
точек равновесия). Это означает, что в точках пересечения фазовых траекторий с осью x1 касательные к фазовым траекториям перпендикулярны к оси x1 , а переменная x1 достигает своего максимума.
3. При однозначной нелинейной функции в (2.5) каждой точке на фазовой плоскости (за исключением некоторых особых точек) соответствует только одно значение производной dx2/dx1, что озна-
25
elib.pstu.ru

чает, что фазовая плоскость состоит из семейства непересекающихся фазовых траекторий. Это позволяет получать наглядные и четкие представления о характере возможных движений, подобно суждению о магнитном поле по прохождению магнитных силовых линий на плоскости.
4.На фазовой плоскости имеется геометрическое место точек,
вкоторых наклон касательных ко всем фазовым траекториям одина-
ков (dx2/dx1 = const), называемых изоклинами. Изоклиной, общей для всех систем, является ось абсцисс фазовой плоскости (dx2/dx1 = ∞).
5.Если при x2 = 0 одновременно f2 (x1, x2 ) = 0 , то фазовая тра-
ектория в таких точках не имеет определенного направления, а обе
производные dx1 и dx2 равны нулю. Такие точки называются осоdt dt
быми. В особых точках по (2.4) обе производные равны нулю, что свидетельствует о неподвижности изображающей точки и нахождении исследуемой системы управления в состоянии равновесия. Особая точка, в которой начинаются все фазовые траектории, неустойчива.
6.Особые точки могут быть как реализуемыми физически, т.е. устойчивыми, так и неустойчивыми, в которых возможность прекращения движения существует только формально.
7.Геометрическое место точек на фазовой плоскости нелинейных систем, в которых происходит переход с одного вида фазовых траекторий на другой, называется линией переключения.
2.3.Фазовые портреты линейных систем 2-го порядка
Проведем анализ фазовых портретов линейных систем второго порядка:
a |
d 2 x(t) |
+ a |
dx(t) |
+ a |
|
x(t) = b u(t) . |
(2.7) |
dt2 |
|
|
|||||
0 |
1 |
dt |
2 |
0 |
|
||
Характеристическое уравнение, корни которого определяют характер переходных процессов в системе (уравнение свободных колебаний), приведем к виду
26
elib.pstu.ru

λ2 + 2hλ + ω02 = 0, |
(2.8) |
где h – коэффициент демпфирования; ω0 – частота собственных колебаний.
Вид фазовых траекторий существенно зависит от корней характеристического уравнения:
λ1,2 = –h ± h2 − ω02 . |
(2.9) |
Уравнение фазовой траектории определяем из решения системы уравнений 1-го порядка:
dx1 ⁄dt = x2, |
|
dx2 ⁄dt = – ω02 x1 – 2h x2, |
|
dx2 ⁄ dx1 = – (ω02 x1 + 2h x2 )⁄ x2. |
(2.10) |
На рис. 2.1–2.4 приведены фазовые портреты линейных систем второго порядка и соответствующие им переходные процессы. На фазовых портретах данных систем изоклинами являются прямые, проходящие через начало координат, что видно из (2.10):
dx2 ⁄ dx1 = const, если x2 = χ· x1, |
(2.11) |
где χ – коэффициент наклона касательной к фазовой траектории при пересечении ее с изоклиной.
Для всех фазовых траекторий изоклинами вертикальных касательных к фазовым траекториям является ось абсцисс x2 = 0.
На рис. 2.2 ось ординат пересекается фазовыми траекториями с χ = –2h, а изоклина горизонтальных касательных к фазовым траекториям показана с χ = 0.
В зависимости от параметров h и ω переходный процесс в линейной системе 2-го порядка может иметь вид:
–периодических колебаний;
–затухающих или расходящихся колебаний;
–монотонного, апериодического затухающего или расходящегося процессов.
Так, например, решение уравнения (2.10) при h = 0 (мнимых сопряженных корнях характеристического уравнения) даст фазовые траектории с уравнением эллипса, фазовый портрет системы –
27
elib.pstu.ru
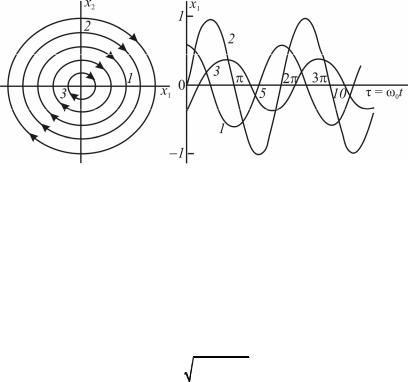
ввиде семейства вложенных концентрических эллипсов с центром
вначале координат с полуосями b⁄a= ω0. В частном случае, когда b = a, фазовый портрет представляется семейством окружностей (рис. 2.1), а переходный процесс оказывается незатухающим коле-
бательным с частотой ω0. Начало координат является особой точкой фазовой плоскости типа центр.
Рис. 2.1. Фазовый портрет и переходные процессы при h = 0
В случае, если ω02 > h2, корни характеристического уравнения (2.9) являются комплексными сопряженными. Переходные процессы для этих случаев, представленные на рис. 2.2, а и 2.2, б, соответствуют устойчивой и неустойчивой системам.
Фазовые траектории соответствуют логарифмической спирали:
R2 |
= Ce2(h/ω1 )ψ , |
(2.12) |
где С – начальное значение радиуса спирали; |
|
|
ω1 = |
(ω02 − h2 ) . |
|
При h > 0 фазовые траектории оказываются скручивающимися кначалу координат и расходящимися из начала координат при h < 0. На фазовой плоскости особыми точками являются устойчивый и не-
устойчивый фокусы.
При ω02<h2 корни характеристического уравнения (2.9) оказываются действительными, причем при h > 0 являются отрицательными, что соответствует устойчивой системе, и положительными
28
elib.pstu.ru

при h < 0, соответствующими неустойчивой системе с расходящимися фазовыми траекториями. Фазовые портреты для данных случаев приведены на рис. 2.3 с особыми точками типов устойчивый и неустойчивый узел.
Рис. 2.2. Фазовые портреты и переходные процессы при ω02 > h2: а при h > 0, б при h < 0
На фазовых портретах данных систем имеются по 2 изоклины, являющиеся одновременно фазовыми траекториями, показанными с индексами χ1 и χ2. Действительно, пусть x2 = χ· x1, тогда для него
dx2 ⁄ dx1 = x2/ x1 = χ.
Подставляя это соотношение в (2.10), получаем χ = – ω02/χ – h2, откуда χ2 + 2hχ + ω02 = 0, т.е. угловой коэффициент луча является корнем характеристического уравнения системы.
29
elib.pstu.ru

Рис. 2.3. Фазовые портреты и переходные процессы при ω02 < h2: а при h > 0, б при h < 0
При ω02 = 0 один из корней характеристического уравнения оказывается равным 0, значение другого определяется коэффициентом демпфирования системы. На рис. 2.4 приведены фазовые портреты и соответствующие им виды переходных процессов устойчивой (h > 0) и неустойчивой систем (h < 0). Особые режимы представлены линиями устойчивого и неустойчивого равновесия – осями абсцисс.
При ω02 < 0 характеристическое уравнение имеет по одному отрицательному и положительному корню, которые определяют неустойчивые переходные процессы независимо от начальных условий.
λ1,2 = −h ± h2 + ω02 , λ1 < 0 иλ2 > 0.
30
elib.pstu.ru