

Теория автоматического управления. Нелинейные системы
.pdfИнерционность нелинейных элементов относится к линейной части (ЛЧ) системы, а нелинейный элемент рассматривается как безынерционный элемент (НЭ) со статической нелинейностью.
Структурная схема нелинейной системы представлена на рис. 1.3.
+
Рис. 1.3. Структурная схема нелинейной системы
Необходимость исследования поведения системы «в большом» заставляет рассматривать характеристики элементов при больших значениях входных воздействий. В этом случае элемент может оказаться нелинейным, хотя и является линеаризуемым «в малом» (при малых значениях входного сигнала).
Примеры простейших типовых нелинейных характеристик безынерционных элементов:
1. Ограничение (звено с характеристикой типа «насыщение»)
(рис.1.4).
Уравнение элемента имеет следующий вид:
|
−c,ε ≤ −b, |
|
|
||||
|
k ε, |
|
ε |
|
≤ b, |
(1.1) |
|
F(ε) = |
|
|
|
||||
|
|
|
|
|
|
|
|
c,ε ≥ b, c = b tgα. |
|
|
|||||
Указанная статическая харак- |
|
||||||
теристика присуща усилительным |
|
||||||
элементам разных типов из-за ог- |
Рис. 1.4. Статическая характеристика |
||||||
раничения |
мощности выходного |
||||||
сигнала. |
|
|
|
|
|
|
типа «ограничение» |
|
|
|
|
|
|
|
|
2. Нечувствительность (элемент с зоной нечувствительности) со статической характеристикой, представленной на рис. 1.5, имеет следующее уравнение элемента:
11
elib.pstu.ru

Рис. 1.5. Статическая характеристика типа «нечувствительность»
Рис. 1.6. Статическая характеристика идеального двухпозиционного реле
Рис. 1.7. Статическая характеристика реального двухпозиционного реле
k(ε − b),ε > b, |
|
|
(1.2) |
F(ε) = 0,−b ≤ ε ≤ b, |
|
|
|
k(ε + b),ε < −b. |
|
Характеристикой данного типа обладают все исполнительные механизмы.
3. Идеальное двухпозиционное ре-
ле. Описать линейной зависимостью эту характеристику невозможно, так как она разрывна (рис. 1.6).
Уравнение элемента имеет вид
c,ε >o, |
|
|
(1.3) |
F(ε) = 0,ε = 0, |
|
|
|
−c,ε <0. |
|
4. Реальное двухпозиционное реле
(элемент с петлей гистерезиса) представлено на рис. 1.7. Уравнение элемента имеет вид
|
|
−b < ε ≤ b |
|
||
|
c,ε ≥ bили & |
|
, |
|
|
& |
|
иε < 0 |
|
(1.4) |
|
F(ε,ε) = |
−b < ε ≤ b |
||||
|
|
|
|||
|
−c,ε ≤ −bили |
|
. |
|
|
|
|
иε > 0 |
|
|
|
|
|
|
& |
|
|
5. Идеальное трехпозиционное ре-
ле (рис. 1.8). Уравнение элемента имеет
следующий вид: |
c, ε < −b, |
|
|||
|
|
||||
F (ε ) = |
|
ε |
|
≤ 0, |
(1.5) |
0, |
|
||||
|
|
|
|
|
|
|
−c, ε > b. |
|
|||
12
elib.pstu.ru

Рис. 1.8. Статическая характеристика идеального трехпозиционного реле
6. Реальное трехпозиционное реле (элемент с зонами нечув-
ствительности и неоднозначности) со статической характеристикой, изображенной на рис. 1.9, имеет уравнение следующего вида:
|
|
|
ε ≥ b или |
rb < ε < b |
|
|
|
|
|
|
c, |
& |
; |
|
|
|
|
||
|
|
|
|
иε < 0 |
|
|
|
|
|
|
|
|
|
rb < ε < b |
−b < ε < −rb |
|
|||
|
0, |
|
|
||||||
& |
−rb ≤ ε ≤ rb или & |
|
|
, или & |
|
; |
|||
F(ε,ε) = |
|
|
иε > 0 |
|
иε < 0 |
|
(1.6) |
||
|
|
|
|
−b < ε < −rb |
|
|
|
||
|
|
|
|
|
|
|
|||
|
−c,ε ≤ −b или & |
|
, |
|
|
|
|||
|
|
< r < 1. |
иε > 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
|
|
|
|
|
|
||
Рис. 1.9. Статическая характеристика реального трёхпозиционного реле
13
elib.pstu.ru

1.3. Определение статических характеристик систем с типовой структурой
Структуру нелинейной системы называют типовой, если она представляет одноконтурную схему из последовательно, параллельно или встречно-параллельно соединенных безынерционных нелинейных элементов с инерционной линейной частью.
1.3.1. Эквивалентные статические характеристики последовательно соединенных звеньев
Последовательное соединение нелинейных элементов (рис. 1.10) эквивалентно одному нелинейному элементу со статической характеристикой
FЭ = F2 oF1 , |
(1.7) |
являющейся композицией статических характеристик составляющих звеньев:
y = F2 (u) = F2[F1 (r)] = FЭ (r) . |
(1.8) |
Рис. 1.10. Последовательное соединение нелинейных элементов
В общем случае перестановка нелинейных элементов дает другой результат (нелинейные операторы не коммутативны), т.е.
F2 oF1 ≠ F1 oF2 . |
(1.9) |
Например, при последовательном соединении идеального реле и линейного безынерционного звена с передаточным коэффициентом k > 0 (линейный усилитель предшествует реле) статическая характеристика последовательного соединения звеньев повторяет в точности статическую характеристику реле:
y = C sgn r , |
(1.10) |
если же звенья переставить, то |
|
y = kC sgn r . |
(1.11) |
14
elib.pstu.ru

Бывают исключения, когда нелинейные преобразования коммутативны. Так, в случае взаимно обратных НЭ, когда графики статических характеристик симметричны относительно биссектрисы первого и третьего квадрантов при одинаковом масштабе по
осям абсцисс и ординат, F1, F2 = F1−1 имеем:
y = F2 oF1 = F1 oF2 = r. |
(1.12) |
Рис. 1.11. Построение статической характеристики последовательного соединения нелинейных элементов
Если статические характеристики последовательно соединенных нелинейных элементов заданы графически, то достаточно просто строится статическая характеристика эквивалентного нелинейного элемента (рис. 1.11).
1.3.2. Статические характеристики параллельно соединенных элементов
Параллельно соединенные нелинейные элементы эквивалентны одному нелинейному элементу со статической характеристикой:
y = F1 (r) + F2 (r) = FЭ (r) . |
(1.13) |
Перестановка нелинейных элементов дает тот же результат. Построение статической характеристики FЭ (r) сводится к поко-
ординатному сложению статических характеристик F1 (r) и F2 (r) .
15
elib.pstu.ru

Если
y = F1 (r) + F2 (r) = r , |
(1.14) |
то такие нелинейные элементы называются взаимно-дополнитель- ными. Компенсация нелинейного звена достигается параллельным подключением взаимно-дополнительной нелинейности. Например, зона нечувствительности компенсируется параллельным включением нелинейного элемента типа «насыщение» (рис. 1.12).
Рис. 1.12. Компенсация зоны нечувствительности элемента подключением взаимно-дополнительного звена
1.3.3. Эквивалентные статические характеристики систем с обратной связью
Если два нелинейных элемента образуют контур с отрицательной обратной связью, то для получения эквивалентной статической характеристики необходимо исключить переменные ε и z в системе уравнений:
y = F1 (ε), |
|
|
(1.15) |
z = F2 ( y), |
|
|
|
ε = r − z. |
|
Отсюда выражение для выхода системы: |
|
y = F1 (ε) = F1 (r − z) = F1[r − F2 ( y)]. |
(1.16) |
Получена требуемая зависимость в неявной форме.
Пусть существует обратная нелинейность F1−1 . Применим это преобразование к последнему выражению
16
elib.pstu.ru

r − F ( y) = F −1 |
( y) r = F −1 |
( y) + F |
2 |
( y) = F −1 |
( y). |
(1.17) |
|
2 |
1 |
1 |
|
Э |
|
|
|
В результате получили статическую характеристику, обратную искомой,
y = FЭ (r) . |
(1.18) |
Алгоритм графического построения требуемой статической характеристики системы (в предположении об её обратимости) следующий:
•строится обратная статическая характеристика F1−1 ;
•характеристики F1−1 и F2 суммируются;
•определяется статическая характеристика, обратная суммарной,
y = FЭ (r) .
Если существуют обратные нелинейности F1−1 и F2−1 , то ис-
ходная структура преобразуема к эквивалентной, как показано на рис. 1.13.
Рис. 1.13. Эквивалентные структурные схемы системы |
|
Покажем справедливость этого преобразования. |
|
Из выражения (1.17) находим |
|
F2 ( y) = r − F1−1 ( y). |
(1.19) |
Пусть существует обратная нелинейность F2−1 . Тогда, применив соответствующее преобразование к выражению (1.19), получим
y = F2−1[r − F1−1 ( y)]. |
(1.20) |
|
17 |
elib.pstu.ru
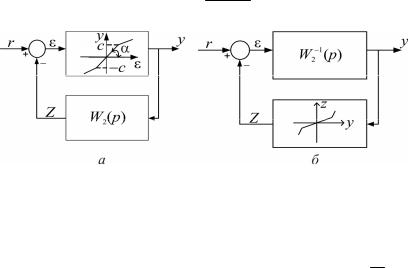
Этому выражению соответствует характеристика встречнопараллельно соединенных элементов с обратными статическими характеристиками (рис. 1.13, б), эквивалентная характеристике исходной структуры (рис. 1.13, а).
Сравнивая преобразованную структуру с исходной, замечаем, что нелинейные элементы поменялись местами, а их характеристики заменены на обратные. На практике такой прием иногда используется для упрощения реализации нелинейных элементов.
Эквивалентность структур имеет место и для динамических звеньев (рис. 1.14). В случае линейных звеньев с передаточными
функциями W1 ( p) и W2 ( p) обратными будут операторы |
1 |
|||
W1 ( p) |
||||
|
|
|
||
и |
1 |
соответственно. |
|
|
|
|
|||
W2 ( p) |
|
|||
Пример 2.1. Пусть нелинейный элемент со статической характеристикой F1 (ε) охвачен отрицательной обратной связью в виде динамического звена спередаточной функцией (гибкая обратная связь):
W2 ( p) = |
Kp |
(1.21) |
(Tp + 1) . |
Рис. 1.14. Эквивалентные структуры системы
сохватом нелинейного элемента линейным динамическим звеном
Вслучае большого усиления нелинейного элемента в линейной зоне при | y(t) |< C (k = tgα >> 1) в схеме на рис. 1.14, б можно игно-
рировать обратную связь с передаточным коэффициентом 1 << 1 .
K
Врезультате приближенно получим:
18
elib.pstu.ru
Y ( p) |
≈ |
Tp +1 |
, |
(1.22) |
R( p) |
|
|||
|
Kp |
|
||
т.е. передаточную функцию пропорционально-интегрального звена. Такой способ применим для реализации аналоговых регулято-
ров, реализующих ПИ-закон управления объектами.
1.4. Преобразование нелинейных структурных схем
Введение в систему нелинейных звеньев несколько ограничивает возможности структурных преобразований по сравнению с линейными системами. Невозможность распространения всех правил структурного преобразования линейных систем на нелинейные связана с невыполнением в нелинейных системах двух принципов: принципа наложения (суперпозиции) и принципа коммутативности. Невыполнение принципа наложения исключает возможность применения правила перемещения линейного звена через суммирующий узел, а невыполнение принципа коммутативности – применение правила перемещения линейного звена через другое линейное звено.
Для нелинейных систем полностью могут быть применены правила перемещения суммирующего узла или линейного звена через узел разветвления:
1.При перемещении суммирующего узла через узел разветвления по направлению передачи сигнала необходимо в отходящих от разветвления ветвях добавить такие же, как и перемещаемый узел, суммирующие узлы.
2.При перемещении суммирующего узла через узел разветвления против направления передачи сигнала необходимо в отходящие от разветвления ветви добавить суммирующие узлы, отличающиеся от перемещаемого узла знаками суммируемых величин.
3.При перемещении звена через узел разветвления по направлению передачи сигнала необходимо в отходящие от узла ветви добавить звенья с оператором перемещаемого звена.
4.При перемещении звена через узел разветвления против направления передачи сигнала необходимо в отходящие от узла ветви добавить звенья с обратными операторами перемещаемого звена.
19
elib.pstu.ru

Примеры преобразования структурных схем по вышеперечисленным правилам приведены на рис. 1.15.
Рис. 1.15. Примеры преобразования структурных схем
20
elib.pstu.ru