

Астахов Основные разделы механики 2011
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ЯДЕРНЫЙ УНИВЕРСИТЕТ «МИФИ»
ОСНОВНЫЕ РАЗДЕЛЫ МЕХАНИКИ КОНСПЕКТ ЛЕКЦИЙ И ЗАДАЧИ ДЛЯ 9 КЛАССА
Для физико-математического лицея
Издание 2-е, с изменениями и дополнениями
Москва 2011
УДК 531(075) ББК 22.251я7 О-75
Основные разделы механики. Конспект лекций и задачи для 9 класса/ М.М. Астахов, А.Б. Батеев, С.Н. Борисов, В.И. Кондарь, Л.А. Корнеева, В.Н. Маскалец, О.М. Сторожук.
Изд. 2-е, с изм. и доп. Уч. пособие. М.: НИЯУ МИФИ, 2011. – 116 с.
Учебно-методическое пособие состоит из трех частей. Первая часть содержит теоретический материал, включающий в себя основные положения, определения и законы кинематики, динамики, законов сохранения в соответствии с программой по физике лицея при МИФИ.
В приложениях, которые являются второй частью пособия, даны необходимые математические определения и формулы, а также приведена методика решения задач.
Третья часть содержит задачи по вышеприведенным разделам физики.
Пособие предназначено для учеников 9-х классов физико-ма- тематических лицеев.
Рекомендовано редсоветом НИЯУ МИФИ в качестве учебного пособия
ISBN 978-5-7262-1541-9
©Астахов М.М., Батеев А.Б., Борисов С.Н., Кондарь В.И., Корнеева Л.А., Маскалец В.Н., Сторожук О.М., 2008, 2011
©Московский инженерно-физический институт
(государственный университет), 2008
© Национальный исследовательский ядерный университет «МИФИ», 2011
ТЕМА 1. КИНЕМАТИКА
Механика раздел физики, в котором изучается движение тел или их частей относительно друг друга.
Кинематика раздел механики, в котором движение тел изучается без рассмотрения причин, его вызывающих.
§1. Скорость материальной точки
Движение тела (механическое) изменение положения тела в пространстве относительно другого тела (других тел) с течением времени.
Для описания движения тела необходима система отсчета. Система отсчета система, состоящая из тела отсчета, свя-
занной с ним системы координат и счетчика времени (например, часов).
Время t скалярная физическая величина (СФВ), служащая для определения последовательности событий и длительности процессов.
Единица времени секунда: [ t ] = с.
Промежуток времени t СФВ, равная разности между конечным (tк) и начальным (tн) моментами времени:
t = tк − tн. |
(1.1) |
Промежуток времени является приращением (изменением) времени.
Промежуток времени величина положительная:
t > 0. |
(1.2) |
Материальная точка (м.т.) тело, размерами которого можно пренебречь в данной задаче.
Траектория непрерывная линия, образованная совокупностью точек пространства, последовательно проходимых движущейся материальной точкой.
Траектории подразделяются на прямолинейные и криволинейные. Траектория и ее вид зависят от системы отсчета.
3
Кинематическое уравнение (закон) движения материальной |
||||||
точки зависимость радиус-вектора м.т. от времени: |
|
|||||
|
|
|
|
r = r(t), |
(1.3) |
|
y |
|
|
или |
эквивалентная ей |
система |
|
|
|
|
зависимостей координат м.т. от |
|||
Н |
|
|
времени (при движении в одной |
|||
rн |
l, |
r |
плоскости): |
|
||
К |
x = x(t), |
(1.4) |
||||
|
|
|
||||
|
|
rк |
|
|||
|
|
|
|
y = y(t). |
|
|
O |
|
|
x |
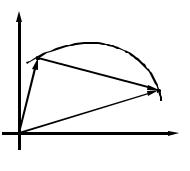
На рис. 1.1 показана траек- |
||
|
Рис. 1.1 |
тория материальной точки, яв- |
||||
|
|
|
ляющаяся графиком зависимости |
|||
|
|
|
y(х), которая может быть полу- |
|||
чена исключением времени t из зависимостей x(t) и y(t). |
|
|||||
Длина пути (путь) S, |
S СФВ, равная длине траектории от |
|||||
начального (при t = tн) до конечного (при t = tк) положений матери- |
||||||
альной точки. |
|
|
|
|
||
Путь неотрицательная и неубывающая величина. |
|
|||||
На показанной траектории (см. рис. 1.1) путь м.т. за промежу- |
||||||
ток времени от tн до tк равен длине линии НК. |
|
|||||
Перемещение l вектор, начало и конец которого совпадают |
||||||
с начальным (t = tн) и конечным (t = tк) положениями м.т. соответ- |
||||||
ственно. |
|
|
|
|
|
|
Перемещение равно приращению радиус-вектора м.т.: |
|
|||||
l = r = rк −rн, |
(1.5) |
где rк и rн радиус-векторы конечного и начального положений м.т. соответственно (рис.1.1).
Единица пути и перемещения — метр: [S] = [l] = м.
Средняя путевая скорость <vs> СФВ, равная отношению пути S к промежутку времени t, за который пройден этот путь:
vs = |
S. |
(1.6) |
|
t |
|
4 |
|
|
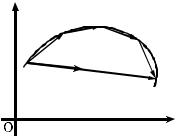
Если известны пути Si (рис. 1.2) за соответствующие им промежутки времени ti (i = 1,2,...,n), такие, что выполняются равенства:
S = ( |
|
|
|
n |
|
|
|
||
S1 + |
S2 + ... + |
Sn )= ∑ Si , |
|
|
(1.7) |
||||
|
|
|
|
|
i=1 |
|
|
|
|
|
t = ( |
|
|
|
n |
|
|
|
|
|
t1 + |
t2 + ... + |
tn )= ∑ ti , |
|
|
(1.8) |
|||
|
|
|
|
|
i=1 |
|
|
|
|
то средняя путевая скорость за весь промежуток времени |
t |
может |
|||||||
быть найдена по формуле: |
|
|
|
|
|
||||
|
n |
|
|
|
y |
|
|
|
|
vs = |
∑ Si |
(1.9) |
|
Si( |
ti) |
||||
i=1 |
|
. |
r ( |
t ) |
|
|
|||
n |
|
|
|
||||||
|
∑ ti |
|
i |
i |
|
|
|||
|
|
|
|
|
|
||||
|
i=1 |
|
|
|
<v> |
r( |
t) |
||
Путевая скорость (мгновен- |
|||||||||
|
|||||||||
|
|
|
|
||||||
ная) vs СФВ, |
равная пределу |
|
|
|
x |
||||
отношения пути |
S к промежутку |
Рис. 1.2 |
|
||||||
|
|
||||||||
времени t, за который этот путь |
|
|
|||||||
|
|
|
|
||||||
был пройден, при бесконечном уменьшении промежутка времени:
vs |
= lim |
S. |
(1.10) |
|
t→0 |
t |
|
(lim /от сокращенного limit/ предел). |
|
||
Средняя скорость <v> |
векторная физическая |
величина |
|
(ВФВ), равная отношению перемещения |
r к промежутку времени |
|
t, за который это перемещение произошло: |
||
v = |
r . |
(1.11) |
|
t |
|
Направление средней скорости за некоторый промежуток времени t совпадает с направлением перемещения м.т. за этот же промежуток времени (см. рис. 1.2).
5
y
v
ri ( t→0)
Н
<vi>
O |
x |
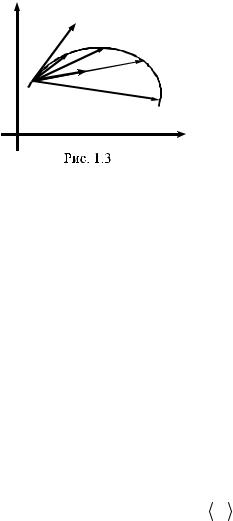
Скорость (мгновенная) v
ВФВ, равная пределу отношения перемещения r к промежутку времени t, за который это перемещение произошло, при бесконечном уменьшении промежутка времени:
v = lim |
r . |
(1.12) |
t→0 |
t |
|
Скорость направлена по касательной к траектории в данной точке (на рис. 1.3 — в т. Н).
Единица скорости — метр в секунду: [v] = м/с.
Модуль скорости равен путевой скорости:
v = vs . |
(1.13) |
§2. Равномерное движение
Равномерное движение (РД) движение, при котором за лю-
бые равные промежутки времени ( ti = const) пути материальной точки одинаковы ( Si = const).
Это движение с постоянной путевой скоростью:
vs = const, |
(2.1) |
при этом траектория может быть как прямолинейной, так и криволинейной.
При равномерном движении:
путевая скорость
vs = vs |
, |
(2.2) |
путь (зависимость от времени) |
|
|
S = v |
t. |
(2.3) |
Путь S за промежуток времени |
t в системе координат vОt равен |
|
площади (выраженной в единицах пути) прямоугольника (рис. 2.1), ог-
6
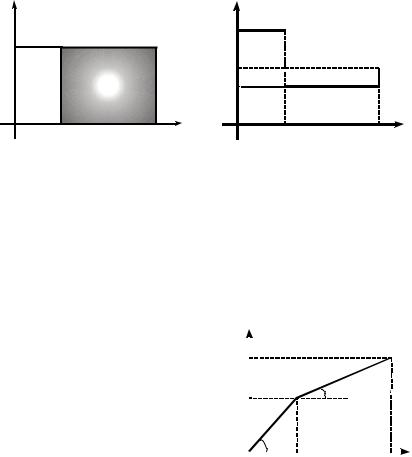
раниченного графиком v(t) = v0, осью времени от начального до конечного моментов временииотрезками прямыхt = tн иt = tк.
График зависимости модуля скорости от времени v(t), состоящий из двух отрезков прямых, соответствующих равномерному движению м.т. со скоростью v1 на первом (0 ≤ t ≤ t1) и v2 на втором (t1 ≤ t ≤ t2) участке, приведен на рис. 2.2.
v
v0
S
О |
t н |
tк t |
Рис. 2.1
v
v1 |
v3 |
<vs > |
|
|
|
|
v2 |
|
|
О |
t1 |
t2 t |
|
Рис. 2.2 |
|
Средняя путевая скорость за общий промежуток времени движения
vs = |
S1 |
+ |
S2 |
= |
v1 |
t1 + v2 t2 |
, |
(2.4) |
t1 |
+ |
|
|
|
||||
|
t2 |
tобщ |
|
|||||
где t1 = t1, t2 = t2−t1, |
tобщ = t2. |
|
|
|
||||
На рис. 2.2 отмечено значение средней путевой скорости <vs> пунктирной линией, которая соответствует графику равномерного
движения м.т. со скоростью |
|
S |
|
|
|
v3 = <vs>. Значение средней путе- |
|
|
|
|
|
S2к |
|
|
|
||
вой скорости <vs> ближе к значе- |
|
|
|
||
|
|
|
|
|
|
нию той путевой скорости, дви- |
|
|
|
α2 |
|
жение с которой длилось по вре- |
S2н |
|
|||
|
|
|
|||
мени больше — скорости v2. |
|
|
|
|
|
На рис. 2.3. приведен график |
|
|
α1 |
|
|
зависимости пути от времени S(t), |
|
|
|
t |
|
состоящий из двух отрезков пря- |
|
О |
t1 |
t2 |
|
мых, соответствующих равномер-
7
ному движению м.т. со скоростью v1 на первом и v2 на втором участке, причем v1 > v2 (см. рис. 2.2).
Зависимость пути от времени: на первом участке (0 ≤ t ≤ t1)
S = v1t (S1н = 0), |
(2.5) |
на втором участке (t1 ≤ t ≤ t2) |
|
S =S2н + v2 (t − t1 ), |
(2.6) |
где S2н = S1к — путь м.т. за промежуток времени от нуля до t1. Тангенсы углов наклона отрезков прямых к оси времени α1 и
α2 (см. рис. 2.3) пропорциональны модулям скоростей:
tgα1 = кгрv1, |
tgα2 = кгрv2, |
(2.7) |
где кгр коэффициент пропорциональности, зависящий от масштабов по осям ординат и абсцисс выбранной системы координат. Чем больше модуль скорости (v1 > v2), тем больше тангенс угла (tgα1 > tgα2) и, следовательно, больше угол (α1 > α2).
Равномерное прямолинейное движение (РПД) движение,
при котором за любые равные промежутки времени ( ti = const) перемещения материальной точки одинаковы ( ri = const).
Это движение с постоянной скоростью:
v = const. |
(2.8) |
|
При равномерном прямолинейном движении: |
|
|
средняя скорость |
|
|
<v> = v, |
(2.9) |
|
перемещение |
|
|
r = v |
t, |
(2.10) |
радиус-вектор |
|
|
r = rн + v t, |
(2.11) |
|
координаты |
|
|
x = xн + vx t, |
у = ун + vу t, |
(2.12) |
где хн, ун — начальные координаты, vx, vу — проекции скорости, путь материальной точки
S = v t. |
(2.13) |
8

Если tн = 0, то t = t и, например, зависимость радиус-вектора от времени принимает следующий вид:
r = rн + vt. |
(2.14) |
Зависимость у(х) при прямолинейном равномерном движении
(в плоскости хОy) является линейной функцией:
|
|
|
v |
y |
|
|
|
v |
y |
|
|
y = y |
н |
− |
|
x |
|
+ |
|
x |
(2.15) |
||
|
|
|
|
||||||||
|
|
vx |
н |
|
vx |
|
|||||
|
|
|
|
|
|
||||||
при vx ≠ 0.
График этой зависимости — прямая линия (рис. 2.4), угол наклона которой к оси Ох определяется отношением проекций скорости на оси Oy и Оx.
y |
|
|
|
|
v |
|
rн |
rк |
|
|
|
О |
|
x |
|
|
Рис. 2.4 |
x |
|
|
|
x (t) |
x2(t) |
|
|
1 |
|
|
β |
α |
|
|
|
xн |
|
|
|
|
|
|
x3(t) |
О tн1 |
tк1 |
tн3 |
t к3 t |
|
Рис. 2.5 |
|
|
Графики зависимости координаты м.т. от времени при различных (как по знаку, так и по величине) проекциях скоростей vxi (i = 1,2,3) приведены на рис. 2.5. Тангенс угла наклона i-го отрезка прямой к оси времени пропорционален проекции i-й скорости:
tgα = кгрvx1 > 0 |
(α > 0), |
(2.16) |
vx |
|
|
|
|
|
|
vx1 |
|
|
|
|
|
||||
tg β = кгрvx3 < 0 |
(β < 0). |
(2.17) |
x1 |
>0 |
|
|
|
||
Приращение |
координаты |
|
tн3 |
|
tк3 |
||||
|
|
|
|
||||||
м.т. по оси Ох за промежуток |
О |
tн1 |
tк1 |
|
x3<0 |
t |
|||
времени |
t при прямолинейном |
|
|
|
|
|
|||
равномерном движении |
|
vx3 |
|
|
|
|
|
||
|
x = vx |
t. |
(2.18) |
|
|
Рис. 2.6 |
|
|
|
|
|
|
9 |
|
|
|
|
|
|

Приращение координаты xi в системе координат vхОt равно площади (в единицах перемещения) прямоугольника, ограниченного графиком vxi(t), осью времени на соответствующем промежутке времени ti и отрезками прямых t = tнi и t = tкi (см. рис.2.6), причем знак xi определяется знаком проекции скорости на ось Ох.
Скорости материальной точки относительно разных систем отсчета
Пусть система отсчета К′ (рис. 2.7) движется относительно системы отсчета К с постоянной скоростью vк′к, м.т. движется относительно системы отсчета К со скоростью vтк, относительно сис-
y |
y′ |
vтк |
|
темы отсчета К′ со скоростью vтк'. |
||
v ′ |
Радиус-векторы, перемещения |
|||||
|
||||||
|
K′ |
vк′к |
кк |
и скорости материальной точки в |
||
K |
rтк′ vтк′ |
|
различных системах отсчета связа- |
|||
О′ |
|
|
ны соотношениями: |
|
||
|
|
|
|
|||
|
rк′к |
rтк |
x′ |
rтк = rк′к + rтк′, |
(2.19) |
|
|
|
|||||
О |
|
|
x |
rтк = rк′к + rтк′, |
(2.20) |
|
|
Рис. 2.7 |
vтк = vтк′ + vк′к, |
(2.21) |
|||
|
|
|
||||
|
|
|
|
|
||
где индексы означают следующее: тк — м.т. относительно системы отсчета К, тк′— м.т. относительно системы отсчета К′, к′к— система К′относительно системы К.
Скорости относительного движения материальных точек
Если известны скорости vi и vj i-ой и j-ой материальных точек, соответственно, относительно некоторой системы отсчета К (рис. 2.8,а), то скорость i-й м.т. относительно j-й м.т. (рис. 2.8,б)
|
|
|
|
vij = vi − vj. |
(2.22) |
|||
y |
|
|
|
|
|
|
vi |
-v |
|
|
|
|
|
|
|||
|
|
|
vj |
|
|
i |
||
K |
|
|
v |
|
v |
|||
|
|
|
|
|
|
ji |
||
|
vi |
|
|
|
ij |
-vj |
vj |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
a) |
x |
|
|
|
б) |
в) |
|
|
|
|
|
||||
Рис. 2.8 10