

Астахов Основные разделы механики 2011
.pdfНа рис. 2.8,в показана скорость vji — скорость j-й м.т. относительно i-й м.т.:
vji = vj − vi. |
(2.23) |
Относительные скорости материальных точек направлены в |
|
противоположные стороны, а их модули равны: |
|
vij = −vji. |
(2.24) |
§3. Ускорение
Среднее ускорение <a> — ВФВ, равная отношению приращения скорости v к промежутку времени t, за который это прира-
щение произошло: |
v . |
|
a = |
(3.1) |
|
|
t |
|
Ускорение (мгновенное) a — ВФВ, равная пределу отношения |
||
приращения скорости v к промежутку времени |
t, за который это |
|
приращение произошло, при бесконечном уменьшении промежутка времени:
a = lim |
v . |
(3.2) |
t→0 |
t |
|
Единица ускорения — метр на секунду в квадрате: [ a ] = м/с2 . Ускорение a может быть разложено на взаимно перпендикулярные тангенциальное aτ и нормальное an ускорения (показаны на
рис. 3.1,а и 3.1,б):
|
|
a = aτ + an. |
|
|
|
(3.3) |
О |
aτ |
v |
aτ |
О |
|
v |
|
α |
τ |
|
|
α |
τ |
|
|
|
|
|
|
|
Траектория |
a |
a |
|
|
|
Траектория |
an |
|
|
an |
|
||
a) |
n |
|
б) |
n |
|
|
|
|
Рис. 3.1 |
|
|
|
|
|
|
11 |
|
|
|
|
Тангенциальное ускорение aτ характеризует изменение модуля
скорости. Оно направлено по касательной к траектории:
aτ = aττед, |
(3.4) |
где aτ — проекция ускорения на ось Оτ, совпадающую по направлению со скоростью v (см. рис. 3.1):
aτ |
= lim |
v |
; |
(3.5) |
|
t→0 |
t |
|
|
где v — приращение модуля скорости материальной точки; τед — единичный вектор, направленный по оси Оτ:
τед |
= |
v |
. |
(3.6) |
|
||||
|
|
v |
|
|
Проекция ускорения на ось Оτ может быть больше нуля (рис. 3.1a), меньше нуля (рис. 3.1б) или равна нулю (например, при равномерном движении м.т. по окружности — см. §7).
Модуль тангенциального ускорения равен модулю проекции ускорения на ось Оτ:
|
aτ |
|
= |
|
aτ |
|
. |
(3.7) |
|
|
|
|
Нормальное ускорение an характеризует изменение скорости по направлению. Оно направлено перпендикулярно скорости м.т. к
центру кривизны траектории:
an = annед, |
(3.8) |
an — проекция ускорения на ось Оn, направленной к центру кривизны траектории (см. рис. 3.1):
an = |
v2 |
, |
(3.9) |
|
R |
||||
|
|
|
где R — радиус кривизны траектории в данной точке, nед — единичный вектор, направленный по оси Оn.
Проекция ускорения на ось Оn всегда положительна и равна модулю нормального ускорения:
an = |
|
an |
|
. |
(3.10) |
|
|
12
Для определения центра и радиуса кривизны траектории в т.М
(рис. 3.2) |
на траектории берутся две |
|
M |
близкие к т.М точки М1 и М2 и через эти |
M1 |
||
три точки |
проводится окружность. Цен- |
M |
|
|
2 |
||
тром этой окружности (т. С) является точ- |
|
|
ка пересечения перпендикуляров к сере- |
|
|
динам отрезков ММ1 и ММ2. При сбли- |
C |
|
жении точек М1 и М2 с точкой М, точка С |
||
|
||
будет стремиться к некоторому предель- |
Рис. 3.2 |
|
ному положению — точке С0 (на рис.3.2 |
||
|
||
не показана). |
|
Точка С0 называется центром кривизны траектории в т.М, а предельное значение радиуса окружности — радиусом кривизны траектории в т.М.
Модуль ускорения материальной точки |
|
a = aτ2 + an2 , |
(3.11) |
угол между ускорением и скоростью (см. рис.3.1)
|
|
|
|
α = arctg |
an |
. |
(3.12) |
|
|||
aτ |
|
|
|
Угол между скоростью и ускорением материальной точки может изменяться от нуля до 180°(0 ≤ α ≤ 180°).
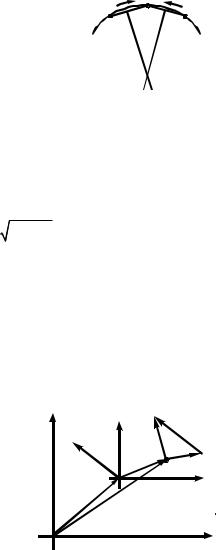
Ускорения в различных системах отсчета связаны соотноше-
нием:
aтк = aтк′ + aк′к, |
(3.13) |
где aтк — ускорение материальной точки относительно системы отсче-
та К (рис. 3.3), aтк′ — ускорение материальной точки относительно системы отсчета К′, aк′к — уско-
рение системы отсчета К′ относительно системы отсчета К.
y |
y′ |
|
a тк |
aк′к |
|
|
|||
K aк′к |
K′ |
0′ |
rтк′ |
aтк′ |
|
rк′к |
rтк |
x′ |
|
|
|
|||
|
|
|
||
0 |
|
|
|
x |
Рис. 3.3
13
§4. Равнопеременное движение
Равнопеременное движение — движение, при котором за лю-
бые равные промежутки времени ( ti = const) приращения скорости материальной точки одинаковы ( vi = const).
При равнопеременном движении:
ускорение
a = <a> = const, |
(4.1) |
зависимость скорости от времени |
|
v = vн + a t, |
(4.2) |
зависимость радиус-вектора от времени |
|
r = r |
+ v |
|
t + |
a( |
t)2 |
. |
(4.3) |
н |
|
|
|||||
|
|
||||||
н |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Равнопеременное прямолинейное движение равноперемен-
ное движение, при котором приращения скорости коллинеарны скорости материальной точки.
При равнопеременном прямолинейном движении ускорение является тангенциальным, а нормальное ускорение равно нулю:
a = aτ, an = 0. |
(4.4) |
Согласно равенствам (4.1), (4.2) и (4.3) проекции ускорения (при движении материальной точки в одной плоскости) на оси Ох и Оу
ax |
= const, |
(4.5) |
|
ay |
= const; |
||
|
зависимости проекций скорости от времени
vx = vнx |
+ ax |
t, |
(4.6) |
|
vy = vнy |
+ ay |
t; |
||
|
зависимости координат от времени
14
|
ax ( |
t)2 |
|
|
|
|
|
|
|
|||||
x = xн + vнx t + |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
(4.7) |
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
ay ( |
t) |
2 |
|
|
|
|
|
|
|||||
y = yн + vнy t + |
; |
|
|
|
|
|
|
|
||||||
|
2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
траектория м.т. прямая линия, |
|
ax |
|
|
|
|
|
|
|
|
|
|
|
|
при этом направления ускорения и |
|
|
|
|
|
|
|
|
|
|
|
|
||
скорости м.т. либо совпадают, либо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
прямо противоположны. |
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
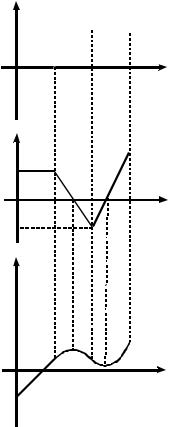
Графики зависимостей ax(t), vx(t), |
|
|
|
|
|
|
|
|
D |
|
F |
t |
||
О A |
B |
|
|
|||||||||||
x(t) представлены на рис. 4.1 а, б, в. |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1) если ax(t) = 0, то vx(t) = const, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x(t) является линейной функцией |
|
vx |
|
|
|
|
|
|
|
|
|
|
|
|
(участки АВ на графиках этих зави- |
|
|
|
|
|
|
|
|
|
|
|
|
||
симостей на рис. 4.7, а, б, в); |
|
|
v |
|
|
A |
B |
|
|
|
F |
|
||
2) если ax(t) = const, то vx(t) — |
|
1 |
|
|
|
|
|
|
|
|
|
|
||
б) |
|
|
|
|
|
|
|
|
|
|
|
|
||
линейная функция, x(t) — квадра- |
О |
|
|
C |
|
E |
t |
|||||||
тичная функция (на участках BD и |
|
|
|
vx |
||||||||||
|
-v1 |
|
|
|
D |
|
||||||||
DF графики x(t) — параболы); |
|
|
|
|
|
|
|
|
|
|
|
|
||
3) если в каких-либо точках vx(t) = 0, то на графике x(t) в этих точках будет либо максимум, либо минимум функции — т.С и т.Е на рис. 4.7, б, в;
4) если на графике vx(t) нет раз- |
|
B |
C |
F |
|
|
|||
рывов (т.В, т.D), то в соответст- |
в) О |
|
D |
t |
x |
E |
|||
вующих точках на графике x(t) на- |
xн A |
|
|
|
блюдается плавный переход одной |
|
|
|
|
кривой в другую (касательные к |
|
|
|
|
этим кривым в точке перехода сов- |
|
|
Рис. 4.7 |
|
падают). |
|
|
|
|
Равноускоренное прямолинейное движение — равнопеременное прямолинейное движение, при котором модуль скорости увеличива-
ется( v > 0).
15
Направления скорости и ускорения м.т. в начальный и последующие моменты времени совпадают (рис. 4.1).
|
|
|
м.т. |
vн |
м.т. |
vк |
|
0 |
|
xн |
a |
xк a |
|
x |
|
|
|
|
|
|
Рис. 4.1 |
vк>vн |
|
|
|
|
|
|
|
|
|
При равноускоренном прямолинейном движении:
модуль скорости
v = vн + a t, |
|
|
||||
путь |
|
|
|
a ( |
t)2 |
|
S =S |
+ v |
|
t + |
. |
||
н |
|
|
||||
н |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
(4.8)
(4.9)
v |
|
|
|
vк |
|
|
|
vн |
S |
|
|
О |
|
tк |
t |
|
Рис. 4.2 |
|
|
|
|
S |
|
|
|
Sк |
|
|
vaн |
О |
|
|
|
vн2 tк |
t |
|
|
2a |
|
|
Рис. 4.3 |
|
|
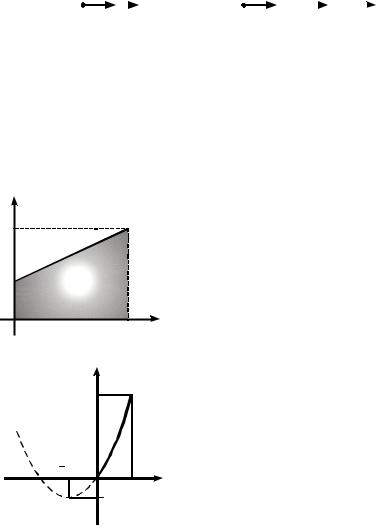
График зависимости модуля скорости от времени (при tн = 0)
v = vн + at, |
(4.10) |
представлен на рис. 4.2.
Путь S за время t в системе координат vОt при равноускоренном движении равен площади (выраженной в единицах пути) трапеции, ограниченной графиком зависимости v(t), осью времени от начального до конечного моментов времени и от-
резками прямых t = tн и t = tк. График квадратичной зависимо-
сти пути от времени (Sн = 0 и tн = 0)
S = vнt + |
at2 |
(4.11) |
|
2 |
|||
|
|
представлен на рис.4.3 (на координатной плоскости SOt пунктиром показано положение вершины параболы, частью которой является график зависимости пути от времени).
16
При равноускоренном прямолинейном движении:
модуль конечной скорости
vк = vн2 + 2aS, |
(4.12) |
||
среднее значение модуля скорости |
|
||
v = |
vн + vк |
. |
(4.13) |
|
|||
2 |
|
|
|
Равнозамедленное прямолинейное движение — прямолинейное равнопеременное движение, при котором модуль скорости уменьшается ( v < 0).
Направления скорости и ускорения м.т. в начальный и последующие моменты времени противоположны (рис. 4.4), а само дви-
жение существует в промежутке времени: tн ≤ t ≤ t н + |
vн |
. |
|
|||||
|
||||||||
|
|
|
|
|
|
a |
||
|
|
a м.т. |
vн |
a м.т. |
vк |
|||
|
О |
xн |
|
xк |
|
|
|
x |
|
|
|
|
Рис. 4.4 |
vк< vн |
|||
|
|
|
|
|
|
|
|
|
При равнозамедленном прямолинейном движении:
модуль скорости
v = vн – a t, |
|
|
||||
путь |
|
|
|
a ( |
t)2 |
|
S =S |
+ v |
|
t − |
. |
||
н |
|
|
||||
н |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
(4.14)
(4.15)
Графики зависимости модуля скорости от времени (при tн = 0)
v(t) = vн – at |
(4.16) |
||
и квадратичной зависимости пути от времени (при Sн = 0) |
|
||
S = vнt − |
at2 |
(4.17) |
|
2 |
|
||
|
|
|
|
представлены на рис. 4.5 и рис. 4.6 соответственно.
17
Путь S за промежуток времени t в системе координат vОt равен площади (выраженной в единицах пути) трапеции (рис. 4.5), образованной графиком v(t), осью времени от начального до конечного моментов времени и отрезками прямых t = tн и t = tк.
v |
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|||
vн |
|
|
|
|
vн2 |
|
|
|
|
|
|
|
|
2a |
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
t |
О |
|
tк |
vн |
О |
|
tк |
vн |
|
|
|||
|
||||||||
|
|
Рис. 4.5 |
a |
|
|
|
|
a |
|
|
|
|
|
|
Рис. 4.6 |
||
При равнозамедленном прямолинейном движении:
модуль конечной скорости
vк |
= vн2 − 2aS (при S ≤ |
vн2 |
), |
|
2a |
||||
|
|
|
t
(4.18)
среднее значение модуля скорости находится по формуле (4.13).
§5. Свободное падение по вертикали
Свободное падение материальной точки у поверхности Земли
— равнопеременное движение, происходящее при малых высотах h (h << Rз — радиуса Земли) и небольших скоростях (практически без сопротивления воздуха).
Ускорение свободного падения постоянно (g = const), направ-
лено вертикально вниз и не зависит от массы материальной точки. Модуль ускорения свободного падения g = 9,81 м/с2.
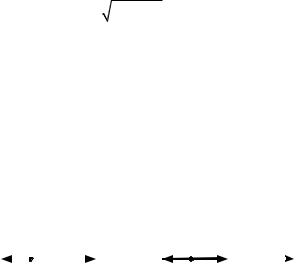
Движение материальной точки у поверхности Земли по вер-
тикали является равнопеременным прямолинейным движением в системе отсчёта, связанной с поверхностью Земли, в случаях, когда м.т. бросают вертикально вверх (рис. 5.1,а) или вниз (рис. 5.1,б) с некоторой начальной скоростью (возможно, с некоторой высоты),
18
либо когда м.т. падает вниз без начальной скорости (рис. 5.1,в) с
некоторой высоты. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При вертикальном движении: |
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
скорость |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
h3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|||
|
v = vн + g |
t, |
(5.1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|||||||||||
|
h2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
радиус-вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
( t)2 |
|
|
|
|
|
|
|
|
|
|
a) |
|
v01 |
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
g |
|
|
h1 |
|
|
|
|
|
|
|
|
|
|
|
|
v02 |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
r = rн |
+ vн t + |
|
. (5.2) |
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнениям (5.1) и (5.2) экви- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
x3 |
x |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
валентны |
следующие |
|
системы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
уравнений (tн = 0): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
vx |
= 0, |
|
|
|
|
x = const, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
(5.3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
(5.4) |
|||||||
vy = vнy + g y t; |
y = yн + vнy t + |
gy t |
. |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Согласно этим уравнениям, проекция скорости материальных точек на ось Oy в системе отсчёта, показанной на рис. 5.1, равна:
1-ой |
v1y = v01 – gt , |
2-ой |
v2y = – v02 – gt , |
3-ей |
v3y = –gt; |
y-координата материальных точек равна:
1-ой |
y |
= h |
|
+ v |
|
t − |
gt2 |
, |
||||
1 |
01 |
|
|
|
||||||||
|
1 |
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
2-ой |
y2 |
= h2 − v02 t − |
|
gt2 |
|
, |
||||||
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||
3-ей |
|
y3 = h3 |
− |
|
gt2 |
|
|
|||||
|
|
|
|
. |
|
|
||||||
|
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
(5.5)
(5.6)
(5.7)
(5.8)
(5.9)
(5.10)
19
|
Решая, например, уравнение (5.8) относительно времени t, |
|||||||||
можно определить моменты времени, при которых м.т. находится |
||||||||||
на высоте h (например, когда h больше начальной высоты h1), а за- |
||||||||||
тем определить проекцию и модуль скорости на этой высоте при |
||||||||||
движении м.т. вверх или вниз, используя уравнение (5.5). |
|
|||||||||
|
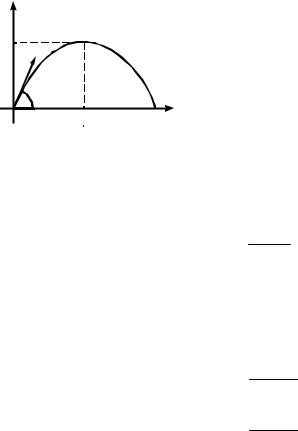
§6. Движение под углом к горизонту |
|
||||||||
y |
|
|
|
Движение материальной точки, |
||||||
|
|
|
брошенной вверх или вниз (возмож- |
|||||||
H |
|
|
но, с некоторой высоты) с начальной |
|||||||
vo |
|
скоростью, направленной под неко- |
||||||||
|
|
|
торым углом α0 (0°< α0 < 90°) к го- |
|||||||
|
αo |
|
ризонтальной оси Ох (рис. 6.1), яв- |
|||||||
|
|
ляется |
равнопеременным |
криволи- |
||||||
О |
|
L x |
||||||||
0,5L |
нейным движением в системе отсчё- |
|||||||||
|
Рис. 6.1 |
|
та, связанной с поверхностью Земли. |
|||||||
скорость |
|
|
При таком движении: |
|
||||||
|
|
|
|
|
|
|
|
|
||
|
|
v = vн + g t; |
|
|
|
(6.1) |
||||
радиус-вектор |
|
|
|
|
|
g( |
t)2 |
|
||
|
|
r = r |
+ v |
|
t + |
|
(6.2) |
|||
|
|
н |
|
|
|
; |
||||
|
|
н |
|
|
|
|
2 |
|
|
|
проекции скорости |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
vx |
= vнx |
+ gx |
t, |
|
(6.3) |
|||
|
|
vy = vнy + gy |
t; |
|
(6.4) |
|||||
координаты |
|
|
|
|
|
|
( |
t)2 |
|
|
|
|
x = xн + vнx |
t + |
gx |
(6.5) |
|||||
|
|
|
2 |
, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y = yн + vнy |
t + |
|
gy |
( |
t)2 |
(6.6) |
||
|
|
|
|
2 |
. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
При определении проекций скорости и ускорения на оси коор- |
|||||||||
20