

Учебное пособие 1432
.pdfАбсолютное удлинение (укорочение) стержня при его нагружении в упругой области определяется согласно закону Гука
l |
Ndz |
, |
|
(2.2) |
|
|
|||||
l |
EF |
|
|||
|
|
|
|
|
|
где l – длина стержня; Е – модуль упругости первого рода. |
|||||
В наиболее общем случае, когда законы изменения N и F |
|||||
для отдельных участков стержня различны, |
|
||||
k |
N dz |
|
|||
l |
|
i |
, |
(2.3) |
|
E F |
|||||
i 1 |
li |
i i |
|
||
где k – число участков стержня.
При Ni const, Ei Fi const в пределах каждого из участков из (2.3) как частный случай следует формула
k |
|
||
l |
Nili |
. |
(2.4) |
E F |
|||
i 1 i i |
|
||
Взаимное перемещение каких-либо двух поперечных сечений стержня можно определить по удлинению (укорочению) той его части, которая заключена между этими сечениями.
Условие прочности при растяжении (сжатии) записывают в виде
N |
|
, |
(2.5) |
|
|||
F |
|
||
|
|
|
где - допускаемое напряжение.
Из условия прочности (2.5) вытекают три вида расчетов: проверочный расчет, проектный расчет и расчет грузоподъемности.
Проверочный расчет сводится к непосредственной проверке соблюдения условия (2.5).
Проектный расчет заключается в определении требуемой площади поперечного сечения стержня и производится по формуле
20

|
N |
|
F |
. |
(2.6) |
Расчет грузоподъемности проводится для определения допустимых величин нагрузок. При этом из условия (2.5) определяют допустимое значение нормальной силы
N F . |
(2.7) |
По найденному значению N с использованием эпюры N или уравнений статики определяются допустимые значения приложенных к стержню нагрузок.
Системы, состоящие из элементов, имеющих форму стержня, называют стержневыми. Стержневые системы подразделяют на статически определимые и статически неопределимые.
Стержневые системы, в которых нормальные силы и реакции связей определяются при помощи метода сечений и уравнений статики или динамики, называются статически определимыми. В статически неопределимых системах использование метода сечений и уравнений равновесия для определения нормальных сил и реакций связей оказывается недостаточным. Разность между числом неизвестных усилий, подлежащих определению, и количеством независимых уравнений равновесия, которые могут быть составлены для их определения, называется степенью статической неопределенности системы.
Для определения усилий в статически неопределимых системах необходимо составить, помимо уравнений статики, уравнения совместности перемещений, основанные на рассмотрении геометрической стороны деформации системы и использовании закона Гука. Необходимое число этих уравнений должно быть равно степени статической неопределимости системы.
Определение усилий в стержнях статически неопределимой системы, т.е. раскрытие ее статической неопределимости, производят в последовательности, рассмотренной в п. (2.1.7).
21
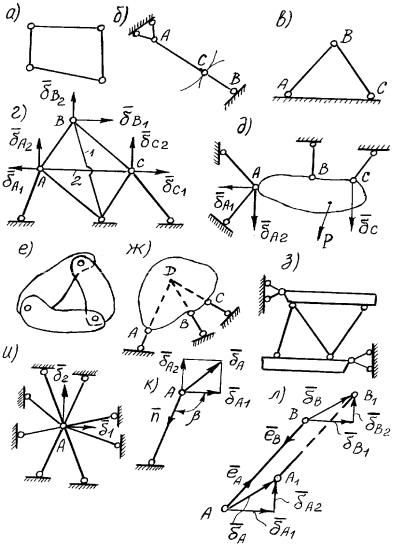
Рис. 2.1
2.2. Плоская стержневая система
Узлом называется место соединения нескольких стержней.
22
Система, состоящая из отдельных стержней, соединенных между собой в узлах, называется стержневой.
В большинстве случаев соединения в узлах являются жесткими. Точный расчет систем с такими узлами сложен и поэтому в расчетной практике жесткие соединения в узлах заменяют шарнирами. Как показывает практика, подобная замена допустима, если внешние нагрузки приложены к системе в ее узлах.
Система называется геометрически изменяемой, если положение ее стержней друг относительно друга может изменяться без деформации ее элементов. Простейшая геометрически изменяемая система состоит из четырех стержней (рис. 2.1, а) и является механизмом.
Пусть имеется два стержня, лежащих на одной прямой (рис. 2.1, б), соединенных в узле С. При малых перемещениях точки С в направлении, перпендикулярном осям стержней, не будут возникать силы, препятствующие таким перемещениям. Подобная система называется геометрически изменяемой в малом (т.е. при малых перемещениях) или мгновенно изменяемой.
Если оси стержней не параллельны, то попытка сместить один из стержней приводит к появлению силы, препятствующей такому смещению (рис. 2.1, в). Таким образом, каждый узел, присоединяемый к геометрически неизменяемой системе, должен соединять стержни, оси которых не лежат на одной прямой.
Опорными узлами стержневой системы называются неподвижные узлы, образуемые стержнями системы и стойкой, которой считается любое неподвижное тело или система неподвижных друг относительно друга тел. На рис. 2.1, в узел А неподвижен.
Подвижными узлами системы называются узлы, способные перемещаться относительно стойки за счет упругих деформаций стержней. Для каждого из подобных узлов можно составить два уравнения статики, поскольку на узел действует
23
система сходящихся сил. Количество неизвестных внутренних сил, действующих в системе, равно числу стержней системы. Условие разрешимости системы уравнений статики для плоской стержневой системы имеет вид
2К-S=0, |
(2.8) |
где К- число подвижных узлов; S |
- количество независимых |
уравнений статики, описывающих равновесие системы.
Если S>2К, то система называется статически неопределимой. Физический смысл статической неопределимости заключается в наличии в системе лишних стержней, которые могут быть удалены из системы при сохранении ее геометри-
ческой неизменяемости. |
|
Величина |
|
L=S-2К |
(2.9) |
называется степенью статической неопределимости системы. Величину L можно определить путем подсчета числа уравнений статики и числа стержней или путем отбрасывания лишних стержней. Так на рис. 2.1, г показана система с S=8 и К=3, являющаяся 2 раза статически неопределимой. Если в этой системе отбросить стержни 1 и 2, то система станет ста-
тически определимой.
Рассмотренные способы определения геометрической неизменяемости и степени статической неопределимости верны для систем, состоящих только из стержней. На практике встречаются системы, включающие не только стержни, но и недеформируемые тела, называемые дисками (рис. 2.1, д). Для каждого диска на плоскости можно составить три уравнения статики. Образование геометрически неизменяемой системы из стержней и дисков заключается в присоединении дисков друг к другу или к стойке таким образом, чтобы диски образовывали жесткие конструкции (рис. 2.1, е) или стержни, прикрепляющие диски, не пересекались в одной точке (рис. 2.1, ж). При выполнении этого условия система из дисков и стержней будет геометрически неизменяемой при выполнении равенства
24
|
3D-S0 0, |
(2.10) |
|
где D - |
число дисков; S0 |
- число стержней, |
включающие и |
опорные стержни. |
|
|
|
При |
определении S0 |
следует помнить, |
что шарнирно- |
неподвижная опора А (рис. 2.1, б) равносильна двум стержням, а шарнирно - подвижная В (рис. 2.1, ж) - одному стержню. Система, изображенная на рис. 1.1, з, имеет S0=7, D=2.
При наличии дисков степень статической неопределимо-
сти определяется по формуле |
|
L= S0-3D, |
(2.11) |
Система (рис. 2.1, з) один раз статически неопределима. Определение сил, действующих в лишних стержнях системы, называется раскрытием статической неопределимости
системы.
2.2.1. Способы раскрытия статической неопределимости
Существует несколько способов раскрытия статической неопределимости стержневых систем. Метод сил является универсальным методом механики твердого деформируемого тела, но в сокращенных курсах сопротивления материалов и тем более в прикладной механике, включающей в себя сопротивление материалов как раздел, не излагается.
В учебной литературе наиболее распространен метод, основанный на уравнениях совместности перемещений дисков и стержней системы, которые отражают особенности деформирования стержней (см п. 2.1.1). Число уравнений совместности деформаций должно быть равно степени статической неопределимости системы, а общее число уравнений, используемых для раскрытия статической неопределимости, равно числу одинаково деформируемых стержней системы. Поэтому подобный метод не удобен для систем с большим количеством неизвестных. Например, для раскрытия статической неопределимости системы, изображенной на рис. 2.1, и, потребуется систему из 8 уравнений.
25
Далее рассматривается метод базовых перемещений (МБП), позволяющий во многих случаях значительно уменьшить порядок системы разрешающих уравнений.
Базовыми перемещениями называются обобщенные независимые между собой перемещения, задание которых однозначно определяет перемещения узлов и дисков системы, а значит и деформации ее стержней. Например, для системы (рис. 2.1, и) базовыми будут перемещения 1 и 2 узла А, знание которых позволяет определить деформации каждого стержня, а значит и действующую в стержне силу. Для системы, изображенной на рис. 2.1, г, базовыми будут перемещения узлов А, В, С - всего 6 базовых перемещений.
Количество W независимых БП называется степенью кинематической определимости системы.
Очевидно, что степень статической неопределимости L и число базовых перемещений W не связаны между собой. Так, например, для системы (рис. 2.1, и) W= 2, L= 6, для системы (рис. 2.1, г) W= 6, L= 2, а для системы (рис. 2.1, д) W= 2, L= 1.
Следует помнить, что МБП необходим в тех случаях, когда требуется определять перемещения точек систем с любым L 0, или для раскрытия статической неопределимости стержневых систем. Для определения сил и напряжений в стержнях статически определимых систем достаточно воспользоваться уравнениями статики. Однако, в тех случаях, когда число неизвестных сил превышает число базовых перемещений, или когда необходимо найти перемещения, МБП позволяет получить более простое решение.
2.2.2. Связь базовых перемещений с деформациями стержней
Для использования МБП нужно устанавливать связь нормальных сил в стержнях системы с базовыми перемещениями (БП). При этом могут быть два случая:
а) один конец стержня неподвижен, то есть, присоединен к стойке (рис. 2.1, к). При этом деформации в стержне опреде-
26

ляются только |
перемещениями подвижного |
конца стержня |
(точка В) 1 и |
2 . Из рис. 2.1, к следует, |
что удлинение |
стержня равно |
|
|
l n A n ( A1 A2 ) , |
(2.12) |
|
где n - орт, направленный по оси недеформированного стерж-
ня от подвижной точки к неподвижной; A |
- |
полное переме- |
||||
щение. |
|
|
|
|
|
|
Пусть i - угол, образуемый n и A . Тогда |
||||||
l A |
cos 1 |
A |
cos 2 |
|
|
|
|
1 |
|
2 |
|
|
|
A |
cos 1 |
A cos(90 1 ) |
(2.13) |
|||
1 |
|
2 |
|
|
|
|
|
A |
cos 1 |
A |
sin 2 . |
|
|
|
1 |
|
2 |
|
|
|
Знак l зависит от соотношений между модулями БП A1 иA2 и направлениями перемещений (угла i ). Если l > 0, про-
исходит растяжение стержня, при l < 0 - сжатие. Следует помнить, что истинные направления БП, как правило, априорно неизвестны и определяются только после решения систем уравнений. Если стержень считать растянутым, то орт n будет
направлен противоположно направлению нормальной силы N в стержне;
б) оба конца стержня подвижны (рис. 2.1, л). В этом случае удлинения стержня определяются в общем случае четырь-
мя БП A1 , A2 , B1 , B2 . и
l eA A eB B |
(2.14) |
где eA и eB - орты, указанные на рис. 2.1, л.
Как известно, удлинение (укорочение) стержня при его нагружении в пределах применимости закона Гука определяется по формуле (2.3)
n Nidzl i 1 Ei F1 .
27
где n - количество участков; Ni , Ei , Fi - нормальная сила,
модуль Юнга и площадь поперечного сечения i- го участка стержня.
Жесткостью стержня называется величина
C=EF/l, (2.15)
где Е - модуль упругости материала стержня, F и l - площадь поперечного сечения и длина стержня.
Жесткость стержня численно равна силе, увеличивающей длину стержня на единицу длины. По определению С измеряется в Н/м.
Нормальная сила в стержне определяется из выражения
l Nl / EF N / C
и равна
N=C l. (2.16)
Если по длине стержня или участка стержня нормальная сила изменяется линейно, то удлинение стержня определяется
по формуле |
|
l CN* , |
(2.17) |
где N* - средняя сила, равная половине суммы нормальных сил на концах стержня (или его части, для которой определяется удлинение).
Если стержень состоит из нескольких стержней, материалы и сечения которых различны, то для определения жесткости C всего стержня приложим на его концах растягивающие единичные силы. Тогда в стержне будет действовать нормальная сила, равная 1 и
n |
n |
|
|
1 li1 |
|
1 li |
1/ C , |
E F |
|||
i 1 |
i 1 i i |
|
|
где i - растяжение стержня, вызванное единичной силой; li, Ei, Fi - длина, модуль упругости материала и площадь сечения i- той части стержня; n - число этих частей.
Поскольку Сi- жесткость i - той части стержня, и li/EiFi=1/Ci,
28
постольку
n |
|
C 1 Ci 1 |
(2.18) |
i 1
Вычисленную подобным образом жесткость называют эквивалентной жесткостью.
Если нужно определить жесткость какой - либо части стержня, можно использовать (2.11), где n должно быть равно числу участков стержней, входящих в эту часть стержня.
Для определения перемещения некоторой точки А, зависящего от нескольких параллельных друг другу БП, можно воспользоваться методом суперпозиции перемещений, суммируя перемещения этой точки, вызванные каждым БП. Тогда
|
W |
|
A |
Aj , |
(2.19) |
|
i 1 |
|
где Aj- перемещение точки А, вызванное перемещением j. Величины Aj определяются геометрическими методами. Пусть, например, точка А лежит на отрезке ВС, концы ко-
торого имеют перемещения 1 и 2 , параллельные друг другу. Пусть длина отрезка равна l, а расстояние между точками А и В равно а. Тогда, считая, что 2 0 , получаем
A1 1(l a)/ l .
Считая, что 1=0, получаем
A2 2a / l.
Суммарное перемещение точки А равно
A A1 |
A2 |
1(1 S ) S 2 , |
(2.20) |
где S= a/l.
Подобным же образом можно суммировать удлинения и силы по формулам
|
W |
|
li |
lij , |
(2.21) |
|
j 1 |
|
|
29 |
|