

Определение момента инерции маховика (метод ф. Виттенбауэра)
При графочисленном решении уравнений движения удобно использовать диаграмму T = T(Jп), устанавливающую связь между кинетической энергией Т и приведённым моментом инерции Jп.
Рассмотрим тот случай, когда приведённые моменты являются функциями угла поворота звена приведения.
Пусть момент Мд задан графиком Мд = Мд() (сплошная линия на рисунке 4.33), момент Мс задан графиком Мс = Мс() (штриховая линия на рисунке 4.33), а момент инерции Jп задан графиком Jп = Jп() (рисунок 4.34).
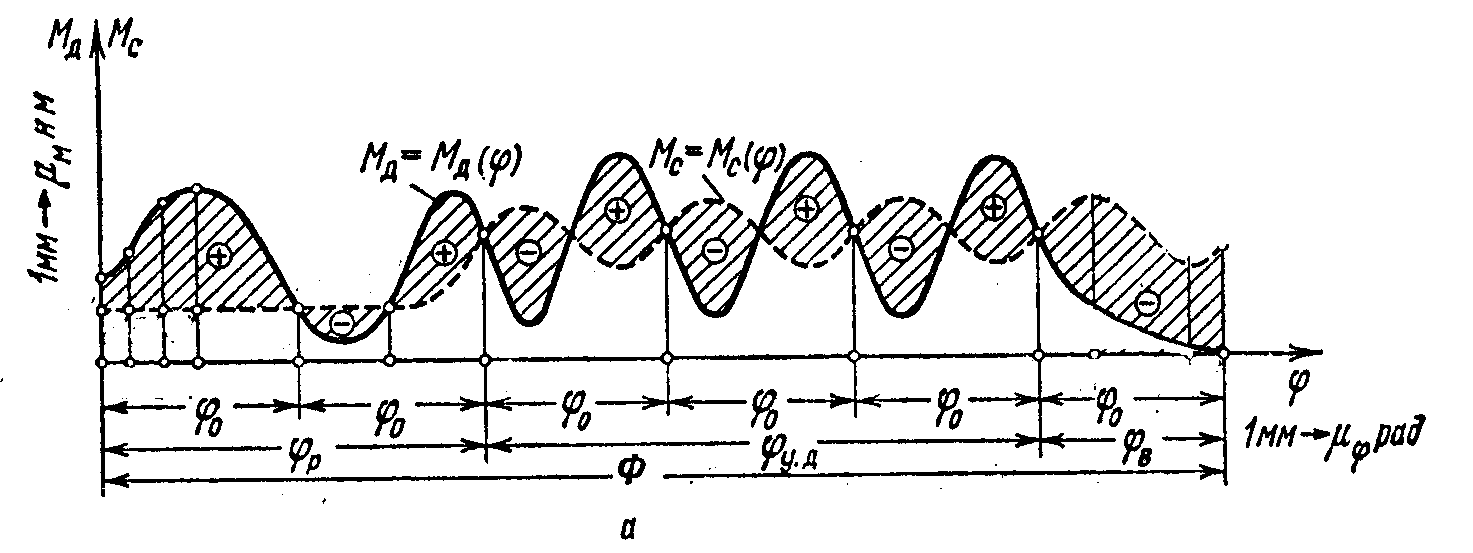
Рисунок 4.82. Графики моментов движущих сил и сил сопротивления
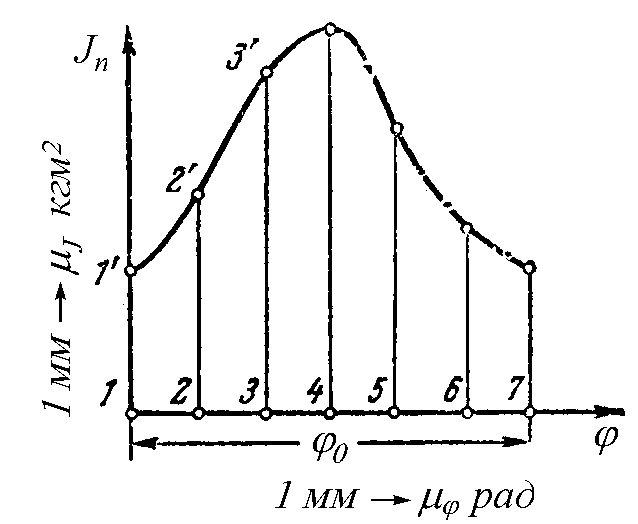
Рисунок 4.83. График приведённого момента инерции
Работа приведенного момента Мд на выбранном интервале равна
![]() ,
,
где – угол поворота звена приведения. Величина этой работы выражается произведением площади, ограниченной кривой Мд = Мд(), осью , начальной и конечной ординатами, на соответствующие масштабы. Работа приведенного момента Мс равна:
![]()
и выражается произведением площади, ограниченной кривой Мс = Мс(), осью , начальной и конечной ординатами, на соответствующие масштабы.
На рисунке 4.33 угол Ф, соответствующий полному времени движения механизма, равен сумме углов:
Ф = р + y.д. + в,
где р – угол времени разбега, у.д. – угол времени установившегося движения и в – угол времени выбега. Угол 0 соответствует времени одного оборота звена приведения. Приращение кинетической энергии механизма за какой-либо промежуток времен выражается разностью площадей кривых Мд = Мд() и Мс = Мс(), помноженной на соответствующие масштабы М и .
Этим площадям следует приписывать знак плюс или минус в зависимости от того, какая работа будет больше: момента движущих сил или момента сил сопротивления (рисунок 4.36). За все время работы механизма, соответствующее углу поворота Ф, приращение кинетической энергии равно нулю и сумма всех заштрихованных площадей со знаком плюс должна равняться сумме площадей со знаком минус, так как в момент пуска механизма и в момент его остановки скорость точки приведения равна нулю. Точно такое же равенство должно иметь место и за время установившегося движения, потому что в этом случае угловая скорость звена приведения механизма через каждый цикл возвращается к прежнему значению.
На рисунке 4.33 условно показано три полных цикла установившегося движения. Практически число этих циклов может быть очень велико, в зависимости от времени непрерывной работы машины. Подсчитав величины указанных выше площадей, можно построить диаграмму Т = Т() изменения кинетической энергии Т звена приведения в функции угла поворота (рисунок 4.38).
На участке установившегося движения кривая повторяется через каждый цикл движения механизма, соответствующий углу 0, причём ордината её достигает то своего максимума, то своего минимума. За время выбега на угле поворота в кривая Т = Т() опускается вследствие наличия только одних сил сопротивления (рисунок 4.35). Момент остановки механизма соответствует полному исчерпыванию кинетической энергии, накопленной в период разбега.
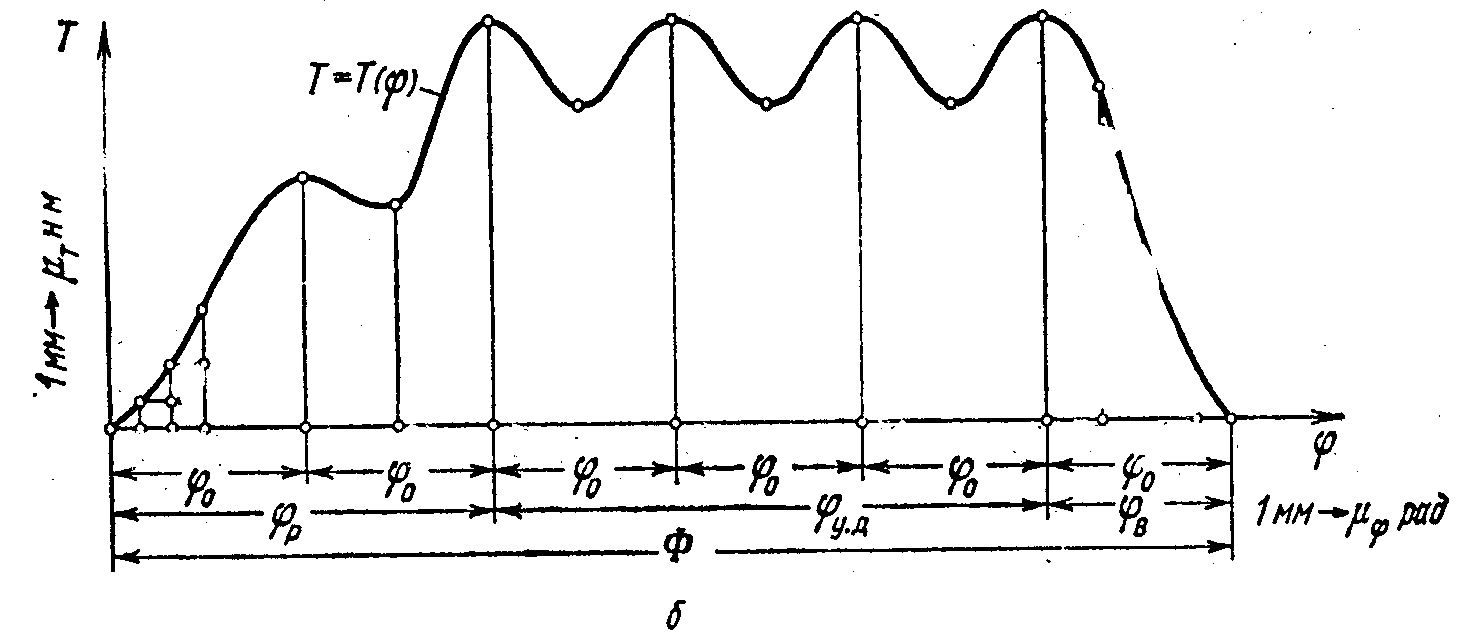
Рисунок 4.84. График кинетической энергии механизма
Таким образом, с помощью диаграммы кинетической энергии Т = Т() определяется полный угол поворота Ф звена приведения при заданных моментах движущих сил и сил сопротивления.
Перейдем теперь к определению угловых скоростей звена приведения. Для этого воспользуемся выражением кинетической энергии механизма:
![]() . (4.47)
. (4.47)
В этой формуле Jп есть приведенный момент инерции и – угловая скорость звена приведения механизма. Диаграмма Jп = Jп() приведенного момента инерции в функции угла поворота дана на рисунке 4.34. Равенство (4.47) можно представить в виде
![]() , (4.48)
, (4.48)
т. е. квадрат угловой скорости звена приведения в каждом рассматриваемом его положении пропорционален отношению кинетической энергии Т, которой обладает машина в рассматриваемом положении, к приведенному моменту инерции Jп, взятому для того же положения.
Для определения значений этого отношения строим диаграммы: приведенного момента инерции Jп = Jп() (рисунок 4.36, а) и кинетической энергии Т = Т() (рисунок 4.36, б). Для удобства построений повернем диаграмму Jп = Jп() на угол 90°, т. е. ось ординат, на которой отложены значения приведенного момента инерции Jп, расположим горизонтально, а ось абсцисс, где отложены значения угла поворота звена приведения, расположим вертикально. Так как кривая Jп = Jп() повторяется через каждый цикл, то можно ограничиться вычерчиванием этой диаграммы на угле поворота 0, как это сделано на рисунке 4.36, а.
Графическим исключением координаты из диаграмм Jп = Jп() и Т = Т() получаем кривую кинетической энергии Т в функции приведенного момента инерции Jп (рисунок 4.39, б). Эта кривая представляет зависимость между кинетической энергией Т и приведенным моментом инерции Jп, т.е. зависимость Т = Т(Jп). Построим кривую Т = Т(Jп) для всего времени движения механизма. На участке установившегося движения кривая Т = Т(Jп) должна быть замкнутой, так как одни и те же значения величин Т и Jп периодически повторяются через каждый цикл. Часть кривой Т = Т(Jп), соответствующая времени разбега, не совпадает с частью кривой, соответствующей времени выбега, так как характер кривой Т = Т() на этих участках различен. Кривая Т = Т(Jп) носит название «диаграммы Виттенбауэра» по имени ученого, впервые рассмотревшего эту зависимость.
Выберем на кривой Т = Т(Jп) какую-либо точку K и соединим эту точку с точкой О – началом координат (рисунок 4.36, б). Обозначим угол, образованный прямой ОK с осью абсцисс, через K. Так как по оси абсцисс отложен приведенный момент инерции JпK в масштабе J, соответствующий точке K, а по оси ординат – кинетическая энергия ТK, соответствующая той же точке K, в масштабе t, то отношение этих величин даст тангенс угла K наклона прямой ОK к оси ОJп:
![]() . (4.49)
. (4.49)
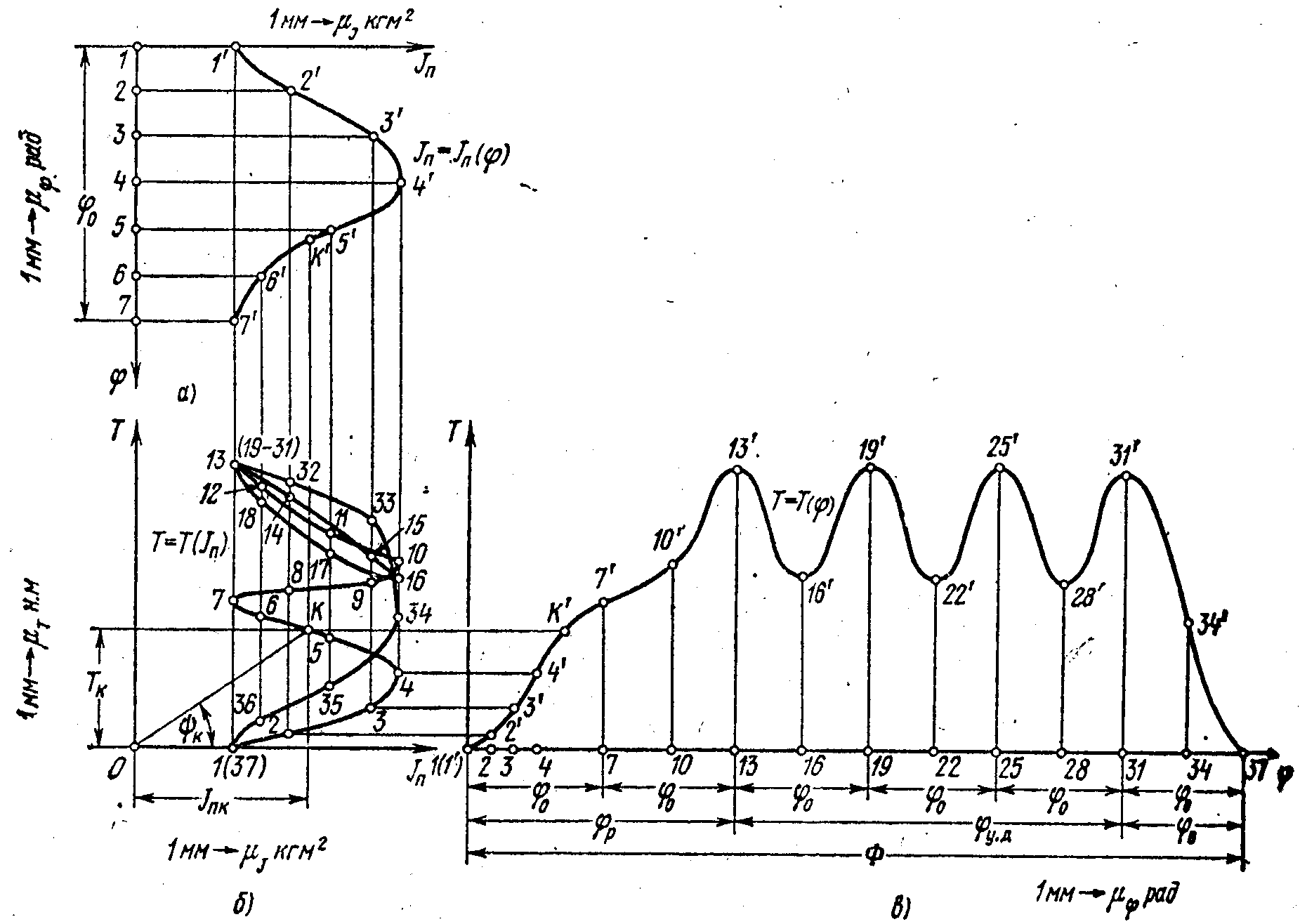
Рисунок 4.85. К определению скорости звена приведения: диаграмма приведённого момента инерции в функции угла поворота (а); диаграмма кинетической энергии в функции приведённого момента инерции (б); диаграмма кинетической энергии в в функции угла поворота (в)
Если соединить последовательно все точки кривой Т = Т(Jп) с началом О, определить последовательно все углы 1, 2, 3, … и, воспользовавшись формулой (4.49), подставить значения тангенсов этих углов в равенство (4.48), то можно получить значение квадратов угловых скоростей звена приведения для всех положений механизма. Имеем
![]() . (4.50)
. (4.50)
Из формул (4.50) следует, что угловые скорости ведущего звена пропорциональны корням квадратным из тангенсов углов 1, 2, 3, …, т.е.
![]() . (4.51)
. (4.51)
Пользуясь этими значениями, можно построить графики угловой скорости со звена приведения в функции угла (рисунок 4.37).
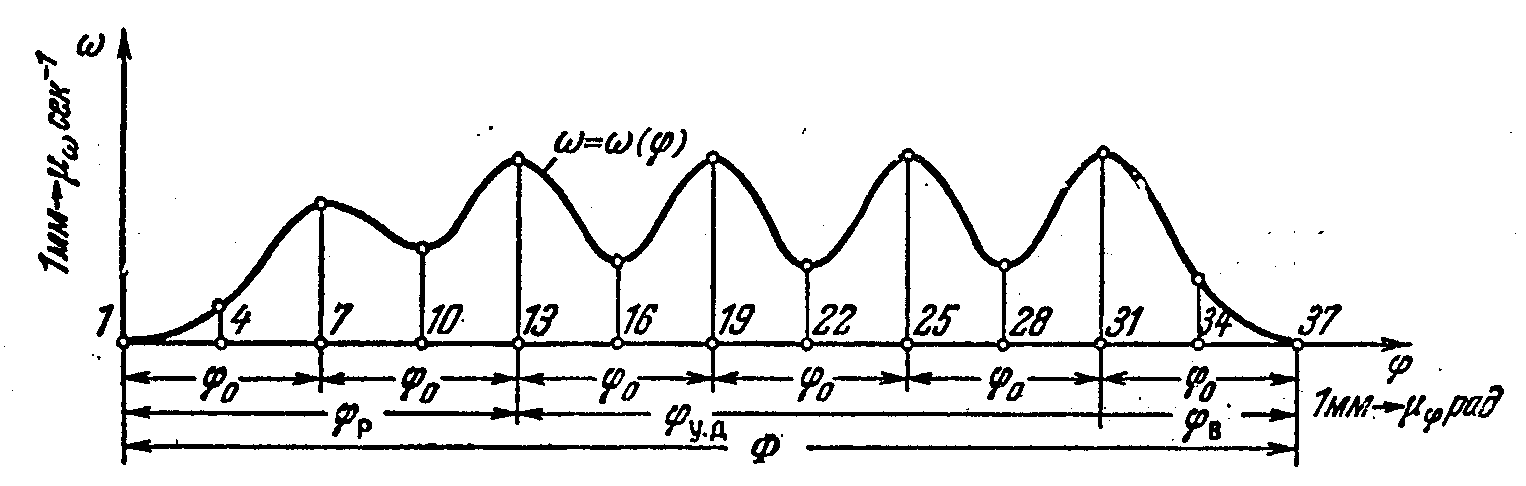
Рисунок 4.86. График угловой скорости звена приведения в функции его угла поворота
Согласно равенству (4.50) можно написать
![]() , (4.52)
, (4.52)
где max и min максимальная и минимальная угловые скорости звена приведения. Коэффициент неравномерности движения равен
![]() . (4.53)
. (4.53)
Умножая числитель и знаменатель правой части формулы (4.53) на (max + min), получим
 , (4.54)
, (4.54)
так как max + min = 2ср.
Подставляя в формулу (4.54) выражения для
![]() из формулы (4.52), получаем
из формулы (4.52), получаем
![]() . (4.55)
. (4.55)
Таким образом, с помощью диаграммы Т = Т(Jn) и последующих графочисленных расчётов может быть полностью исследован вопрос о движении агрегата при силах, зависящих от положения звена приведения.
При определении момента инерции махового колеса с помощью уравнения кинетической энергии заданными являются коэффициент неравномерности движения механизма и средняя угловая скорость ср. Также задаются диаграммы приведенных движущих моментов и моментов сопротивления и диаграмма приведенного момента инерции в функции угла поворота ведущего звена. Необходимо подчеркнуть, что при расчете маховика с помощью диаграммы T = T(Jп) силы инерции не должны входить в диаграммы движущих сил и сил сопротивления. Диаграммы моментов движущих сил и моментов сил сопротивления даются только для времени установившегося движения. Следовательно, определение разностей площадей, заключенных между этими двумя кривыми так, как это было показано выше, позволяет определить только изменение кинетической энергии механизма или машины (Т). Далее, так как нам известны массы и моменты инерции всех звеньев механизмов машины, кроме момента инерции махового колеса, величину которого мы и должны найти, то нами может быть определено только изменение Jп приведенного момента инерции звеньев механизма. Таким образом, не зная момента инерции маховика и величины кинетической энергии, накопленной механизмом или машиной за время их разбега, можно построить только диаграмму Т = Т(Jп) для одного полного цикла времени установившегося движения механизма или машины (рисунок 4.38).
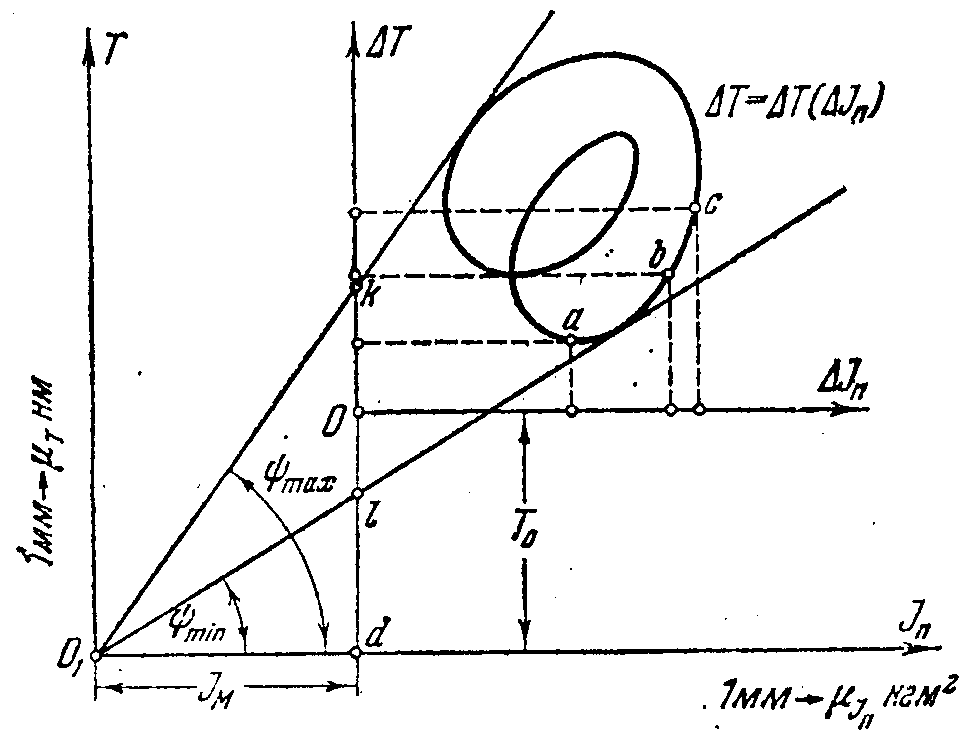
Рисунок 4.87. К расчету маховика по диаграмме зависимости кинетической энергии от приведенного момента инерции звеньев
Для определения величины Jм приведенного момента инерции маховика воспользуемся формулами:
![]() ; (4.56)
; (4.56)
![]() . (4.57)
. (4.57)
Подставляя данные значения для ср и в формулы (4.56) и (4.57), определяем углы max и min. Проводим, далее, одну касательную к кривой Т = Т(Jп) под углом max, а другую – под углом min и определяем точку пересечения О1 этих касательных (рисунок 4.41). Точка О1 является началом осей координат диаграммы Т = Т(Jп) полной кинетической энергии Т механизма в функции полного приведенного момента инерции Jп. Следовательно, для определения полного приведенного момента инерции Jп в каждом положении механизма необходимо отсчитать абсциссы от нового начала координат О1. Приведенный момент инерции махового колеса равен произведению отрезка (О1d) в миллиметрах на масштаб Jп, т.е. Jм = Jп(О1d).
Необходимо отметить, что при малых значениях коэффициента вследствие незначительной разности между углами max и min точка пересечения О1 касательных очень часто уходит за пределы чертежа. В этом случае можно поступить следующим образом. Обозначим точки пересечении касательных с осью ординат ОT (рисунок 4.41) первой системы координат через k и . Тогда
![]() ;
;
![]() .
.
Подставляя только что найденное выражение для разности тангенсов в формулу, имеем
![]() .
.
Откуда, имея в виду, что Jп(О1d) = Jм, получаем
![]() . (4.58)
. (4.58)
Приведенный момент инерции махового колеса, следовательно, может быть определен по величине отрезка (k) на оси ординат ОT.
Если маховик посажен на общий вал со звеном приведения, то его момент инерции Jм относительно оси вращения вала может быть уменьшен на величину момента инерции звена приведения относительно той же оси.
Так как маховик обычно выполняется в виде колеса, имеющего массивный обод, соединенный с втулкой спицами, то моментами инерции этих соединительных частей часто пренебрегают и приближенно считают, что масса маховика равномерно расположена по окружности радиуса R, представляющей собой геометрическое место центров тяжести поперечных сечений обода. Тогда момент инерции Jм маховика может быть выражен так:
![]() . (4.59)
. (4.59)
где D — диаметр окружности центров тяжести сечений обода, а т — масса обода маховика. Из формулы (4.59), учитывая формулу (4.58), находим
![]() , (4.60)
, (4.60)
где п есть число оборотов в минуту звена приведения. Принимая 2 10, можем написать
![]() . (4.61)
. (4.61)
Произведение массы обода маховика на квадрат его диаметра носит название махового момента или характеристики маховика. Характеристика маховика имеет размерность кгм2. По этой характеристике можно определить необходимую массу маховика, если задан его диаметр, величина которого определяется в большинстве случаев из чисто конструктивных соображений. Если маховик устанавливается не на звене приведения, а на каком-либо вращающемся звене i машины, то всегда должно удовлетворяться условие равенства кинетических энергий
![]() , (4.62)
, (4.62)
где Jмi — момент инерции маховика, установленного на звене i, а i – величина угловой скорости этого звена. Из равенства (4.62) следует
![]() . (4.63)
. (4.63)
Значит, чем больше угловая скорость звена i, тем меньше должен быть момент инерции устанавливаемого маховика. Поэтому выгодно, вообще говоря, с точки зрении уменьшения веса махового колеса устанавливать его на звеньях, обладающих большими угловыми скоростями.
Из формулы (4.63) также следует, что для соблюдения условия постоянства момента инерции Jмi необходимо, чтобы передаточное отношение /i было постоянным, что приводит к условию установки маховика на звеньях, которые связаны со звеном приведения передаточным отношением постоянной величины (механизмы круглых зубчатых колес, червячные механизмы и т. д.).
При установке маховика не на звене приведения необходимо учитывать жесткость промежуточной кинематической цепи. При малой жесткости кинематической цепи упругие колебания могут оказаться настолько большими, что маховое колесо не будет выполнять своего назначения.