

4 Разработка технологического процесса для проектируемых производственных подразделений
4.1 Детальное описание объекта технических воздействий
Навигационные системы дистанционного слежения за транспортом и грузом с момента своего появления значительно облегчили жизнь транспортно-логистическим службам, ответственным за контроль автомобиля на пути следования. В общих чертах GPS для автомобилей (global positioning system) представляет собой комплекс из космического и наземного электротехнического оборудования. Прибор способен определять местоположение транспорта (географические координаты и высоту), время и различные параметры движения (направление, скорость и т.д.) и передавать их в офис транспортной компании.
Компания «БелТрансСпутник» является заслуженным лидером в области продаж навигационных систем для автомобилей. Предлагаемое нами оборудование специально предназначено для эксплуатации при жесткой автомобильной вибрации, в условиях возможного противодействия водителя. Тот факт, что нами уже оснащено и обслуживается более 8500 автомобилей в Республике Беларусь, говорит о высокой надежности системы. Это также говорит о выгодности использования системы GPS-мониторинга «БелТрансСпутник». Так как сегодня ни одно предприятие не будет платить деньги за то, что не приносит значительной финансовой выгоды. Практика использования систем мониторинга автотранспорта «БелТрансСпутник» показала, что они помогают сократить приписки пробега (от 10 до 250 %), сократить самовольные простои (от 5 до 50 %), увеличить оборачиваемость Вашего транспорта и пр.
Система gps навигации для предприятий от «БелТрансСпутник» используется для решения следующих задач.
Контроль движения авто на территории Республики Беларусь и за рубежом в режиме онлайн. Мобильные навигационные системы для автомобилей работают даже там, где нет GSM-связи.
Отображение истории фактического перемещения транспорта за интересующий период с определением реального километража и точных адресов стоянок, моточасов и т.д.Контроль водителей: выявление водительских приписок пробега, «накруток» спидометров (одометров) и, соответственно, попыток украсть появившиеся излишки топлива.
Выявление самовольных простоев и потерь рабочего времени.
Определение отношения водителя к использованию авто (фиксация резкого торможения или разгона, небрежный проезд выбоин и проч.). Поиск объектов по адресу и создание оптимального маршрута.
Контроль графика перевозки.
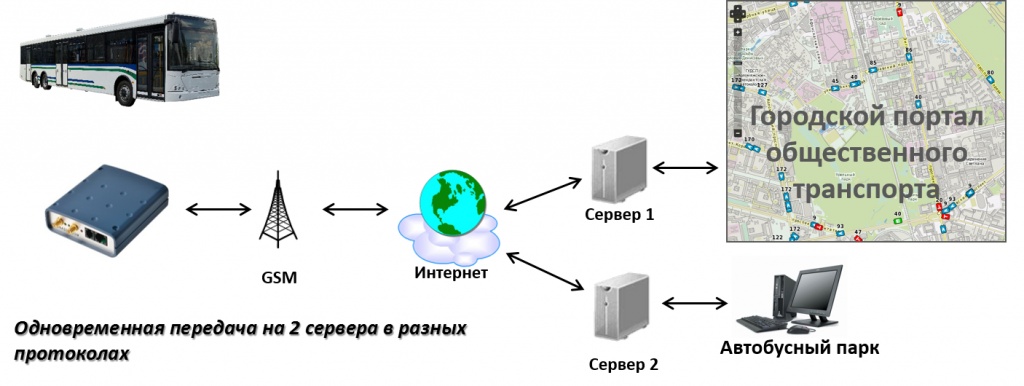
Рисунок 4.1 — Организация автобусных сообщений с помощью навигационной системы
4.2 Краткое описание и основные технические характеристики технологического оборудования для технологического процесса
Подбор основного технологического и подъемно-транспортного оборудования для зоны диагностирования и зоны Д выполнен в соответствии с технологическим процессом с использованием БД «Оборудование-2006».
Перечень основного технологического и подъемно-транспортного оборудования для зоны Д приведены в таблице А.12.
Перечень основного технологического и подъемно-транспортного оборудования для участка электротехнического приведен в таблице А.13.
KTS TRUCK оснащается мультиметром для измерения напряжения, сопротивления и силы тока, а также оборудован встроенным сменным ISO-CAN-адаптером для автоматической перепиновки диагностической колодки и 4-полюсным OBD-адаптером.
Модуль KTS TRUCK может обмениваться данными с компьютером не только через USB-кабель, но и посредством радиоканала Bluetooth.KTS TRUCK, обладающий всеми преимуществами модуля KTS 540, оборудован усовершенствованными двухканальными мультиметром и осциллографом.
Автомобильный системный сканер BOSCH KTS TRUCK представлен на рисунке 4.2.

Рисунок 4.2 — Автомобильный системный сканер BOSCH KTS TRUCK