

Электрические машины. Давидчук, Лебедев. Конспект лекций
.pdfФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Федеральное государственное бюджетное образовательное учреждение высшего образования
“ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ ИМПЕРАТОРА АЛЕКСАНДРА I
Кафедра «Электромеханические комплексы и системы»
Г.А. Давидчук, А.М. Лебедев ЭЛЕКТРИЧЕСКИЕ МАШИНЫ. УЧЕБНОЕ ПОСОБИЕ.
СПБ, ПГУПС, – ЧАСТЬ 1 – 2008, ЧАСТЬ 2 – 2010.
Б1.Б.30 « ЭЛЕКТРИЧЕСКИЕ МАШИНЫ»
КОНСПЕКТ ЛЕКЦИЙ
для специальности 23.05.05 «Системы обеспечения движения поездов»
по специализациям «Автоматика и телемеханика на железнодорожном транспорте»
«Телекоммуникационные системы и сети железнодорожного транспорта» «Рапдиотехнические системы на железнодорожном транспорте» «Электроснабжение железных дорог»
Форма обучения – очная, очно-заочная, заочная
Санкт-Петербург
2016
Содержание |
|
Введение ……………………………………………… |
3 |
1. Машины постоянного тока ……………………… |
4 |
1.1. Устройство, принцип действия и физические особенности ра- |
|
боты машины постоянного тока… |
4 |
1.2. Работа машины постоянного тока в режиме генератора |
42 |
1.3. Работа машины постоянного тока в режиме двигателя ………… |
50 |
2. Трансформаторы ………………………………………… |
77 |
2.1. Однофазные трансформаторы …………………… |
77 |
2.2. Трехфазные трансформаторы …………… |
92 |
2.3. Автотрансформаторы ……………………… |
97 |
3.Асинхронные машины……………………………………………… 99
3.1Конструкция, принцип действия и краткий анализ режимов работы асинхронных машин………………………………………... 99
3.2Механические характеристики и регулирование частоты вращения асинхронной машины………………………………….... 111
3.3Асинхронные машины автоматических устройств……………. 121
4.Синхронные машины………………………………………………… 124
4.1.Устройство, принцип действия и физические особенности
работы синхронной машины……………………………………….. 124
4.2.Работа синхронной машины в режиме генератора…………….131
4.3.Работа синхронной машины в режиме двигателя…………….. 134
4.4Специальные типы синхронных машин………………………... 139
2
Введение
Электрические машины (ЭМ) – это электромагнитомеханические преобразователи энергии или, иначе говоря, механизмы, в которых с помощью магнитного поля электрическая энергия преобразуется в механическую (режим двигателя) или, наоборот, механическая энергия в электрическую (режим генератора). Причем большинство электрических машин взаимообратимы по режимам работы и могут работать как генераторами, так и двигателями.
По роду питающего (для двигателей) или вырабатываемого (для генераторов) тока ЭМ подразделяют на машины постоянного и переменного тока. В свою очередь, машины переменного тока в зависимости от принципа действия и конструкции классифицируются на асинхронные и синхронные.
Машины постоянного тока используются в основном как двигатели в системах регулируемого электропривода (электротранспорт, металлургия, судовые гребные установки и т. д.), благодаря высокой перегрузочной способности и хорошим регулировочным свойствам. Наиболее распространенным типом ЭМ в промышленности являются асинхронные двигатели, имеющие высокую надежность в эксплуатации и простую конструкцию. Выработка электроэнергии на электростанциях и в системах автономного электроснабжения (дизель-генераторы, газотурбогенераторы и пр.) осуществляется в основном синхронными генераторами. Синхронные двигатели применяются реже, чем асинхронные, и используются в нерегулируемом электроприводе.
Очень важную роль в системах передачи, распределения и преобразования электрической энергии играют трансформаторы, статические устройства. В них, так же как и в ЭМ с помощью магнитного поля, происходит преобразование электрической энергии в электрическую же, но с другими параметрами.
Данное пособие предназначено для студентов очной и вечерней форм обучения по специальности 181400 «Электрический транспорт железных дорог» ПГУПС и соответствует требованиям государственных образовательных стандартов, определяющих объем и содержание курса «Электрические машины» для указанной специальности. В пособии рассмотрены конструкции и принцип действия различных типов ЭМ и трансформаторов, физические процессы в них, характеристики и способы управления электрическими машинами.
3
1.Машины постоянного тока
1.1.Устройство, принцип действия и физические особенности
работы машины постоянного тока
Конструкция машины постоянного тока (МПТ). Неподвижная часть МПТ (рис. 1.1) называется индуктором и состоит из стального корпуса 1, именуемого станиной или остовом и выполняющего обычно роль магнитопровода, главных 2 и добавочных 3 полюсов, траверсы 4 со щеткодержателями и подшипниковых щитов 5. Сердечники главных и добавочных полюсов могут быть выполнены из массивной стали или набраны из отдельных неизолированных стальных листов, так как по ним проходит постоянный магнитный поток. В случае интенсивного регулирования магнитного потока, а также при наличии в этом потоке переменной составляющей (тиристорное или импульсное питание) целесообразно внутреннюю часть корпуса и сердечники главных и добавочных полюсов изготавливать из тонких изолированных друг от друга листов электротехнической стали. На главных и добавочных полюсах расположены обмотки возбуждения главных 6 и добавочных 7 полюсов, выполненные в виде сосредоточенных катушек. Обмотка возбуждения главных полюсов предназначена для создания основного магнитного потока в воздушном зазоре, а обмотка возбуждения добавочных полюсов – для создания коммутирующего поля (см. коммутация МПТ). В машинах небольшой мощности добавочные полюса могут отсутствовать. МПТ средней и большой мощности могут иметь компенсационную обмотку 8, расположенную в пазах наконечника главного полюса.
Воздушный зазор под главным полюсом может быть равномерным или расходящимся (увеличивающимся от центра к краям), зазор под добавочным полюсом обычно несколько больше, чем под главным. Магнитная проводимость воздушного зазора под наконечником главного полюса намного выше, чем в межполюсном пространстве.
Помимо описанной выше явнополюсной конструкции индуктор МПТ может иметь и неявнополюсную конструкцию. В этом случае распределенная обмотка возбуждения укладывается в пазы, расположенные по внутренней окружности неподвижной части. При этом воздушный зазор и его магнитная проводимость по всем радиальным направлениям становятся постоянными.
Вращающаяся часть МПТ, именуемая якорем, состоит из вала 9 и подшипников 10, сердечника якоря 11 с обмоткой 12 и коллектора 13. Сердечник якоря вращается в неподвижном постоянном магнитном поле
4

главных полюсов и при вращении подвергается перемагничиванию, поэтому он изготавливается из тонких, изолированных друг от друга листов (для снижения потерь от вихревых токов) электротехнической стали (для снижения потерь на гистерезис).
Обмотка якоря выполняется двухслойной (каждая катушка укладывается одной стороной в верхний слой паза, а другой стороной – в нижний слой другого паза), поэтому в лобовых частях (в местах перехода из паза в паз) катушки друг с другом не пересекаются. В зависимости от формы катушек (секций) различают петлевые, волновые и комбинированные обмотки (см. обмотки якоря).
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
12 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
5 10
Рис. 1.1. Конструкция МПТ (а) и основные элементы поперечного сечения (б)
Коллектор состоит из изолированных друг от друга коллекторных пластин, к каждой из которых подпаиваются по одному концу двух соседних секций. В результате между равномерно распределенными по окружности щетками образуются параллельные ветви, состоящие из последовательно соединенных секций. При вращении коллектора каждая из последовательно соединенных секций замыкается щеткой (в петлевых обмотках) или двумя однополярными щетками (в волновых обмотках) накоротко и переходит из одной параллельной ветви в другую (при этом ток в секции меняет свое направление на противоположное – такой процесс называется коммутацией). Если момент коммутации совместить в пространстве с моментом прохождения этой секции поперечной оси (оси добавочного полюса), именуемой в МПТ геометрической нейтралью, то под главным полюсом одной полярности окажутся пазы якоря с токами одного направления, а под главным полюсом другой полярности – пазы с токами другого направления.
5

Принцип действия МПТ. На рис. 1.2 изображена простейшая физическая модель МПТ, где в зазоре между двух полюсов 1 может свободно вращаться рамка 2, концы которой подпаяны к двум пластинам 3, соприкасающимся с неподвижными щетками 4.
|
|
|
|
В режиме генератора рамка (рис. 1.3, а) |
||
|
|
2 |
|
приводится во вращение с частотой n внеш- |
||
|
|
1 |
ним приводным |
двигателем (ПД), при этом |
||
|
|
|
||||
|
|
N |
|
желательно поддерживать постоянной частоту |
||
|
3 |
1 |
вращения n const , так как от нее зависит ве- |
|||
4 |
|
|||||
|
|
|
личина выходного напряжения. При питании |
|||
|
|
|
|
|||
|
|
S |
|
обмотки возбуждения главных |
полюсов по- |
|
|
|
|
стоянным током возбуждения iв |
в воздушном |
||
|
|
|
|
|||
|
|
|
|
зазоре под полюсным наконечником возника- |
||
Рис. 1.2. Простейшая физическая |
ет неизменный во времени и неподвижный в |
|||||
|
|
модель МПТ |
|
пространстве магнитный поток , который |
||
|
|
|
|
|||
|
|
|
|
замыкается (см. |
с. 13) по сердечнику якоря, |
|
воздушному зазору, сердечнику главных полюсов и ярму (корпусу МПТ). Направление при электромагнитном возбуждении определяется по «правилу буравчика».
а) |
|
|
|
|
|
б) |
|
|
|
в) |
|
|
|
|
|
|
|
|
|
iв |
|
|
|
|
|
|
|
|
|
N |
|
|
N |
|
Uв |
N |
iв |
↓ B |
eпр |
N |
iв |
iпр |
↓ B |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
+ |
|
|
|
v |
|
|
fпр |
|
|
|
|
|
2 |
|
|
|
|
|
fпр |
|
|
|||
|
|
1 |
|
3 n |
v |
eпр |
v |
|
|
iпр Dа |
|
|
|
|
|
|
|
|
|
|
eпр |
n |
|
Mэм |
iпр |
fпр |
|
|
|
|
iа |
|
4 |
iв |
|
|
|
|
|
|
|
|||
|
iа |
S |
|
S |
|
|
|
|
S |
|
|
|
||
|
|
|
Uв |
iв |
|
|
|
iв |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iа |
Uа |
Iа |
|
|
|
|
|
|
|
|
|
|
|
|
Mв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПД |
Rнг |
Iнг = Iа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 1.3. МПТ в режиме генератора (а): определение направления ЭДС в обмотке якоря (б) по правилу правой руки и электромагнитного тормозного момента на валу (в)
по правилу левой руки
6
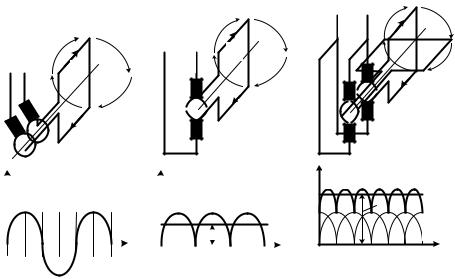
При вращении рамки обе ее стороны являются проводниками, движущимися в магнитном поле , поэтому в них будет индуктироваться
ЭДС. При прохождении проводниками точек 1 и 3 (рис. 1.3, а) ЭДС будет равна нулю, так как проводник в этом случае движется параллельно линиям магнитного поля. При прохождении проводниками точек 2 и 4 ЭДС будет максимальна, так как проводники будут двигаться перпендикулярно линиям поля. Величина этой ЭДС будет равна eпр B l va (где B – ин-
дукция магнитного поля в воздушном зазоре, l – длина проводника в зоне магнитного поля, va – окружная скорость якоря), а направление определя-
ется по «правилу правой руки» (рис. 1.3, б). Под полюсами разной полярности направление ЭДС будет различным, поэтому суммарная ЭДС рамки Eр 2eпр , а график ее изменения во времени представлен на рис. 1.4, а.
Частота изменения Eр определяется частотой вращения n и числом пар полюсов p , расположенных по окружности якоря: f pn . При прохож-
дении точек 1 и 3 (рис. 1.3, а) одновременно с изменением направления ЭДС в проводниках рамки происходит переход вращающихся пластин, к которым подпаяны концы рамки, к неподвижным щеткам другой полярности, поэтому ЭДС Ea Ua на зажимах якорной цепи после щеток будет
изменяться согласно рис. 1.4, б. Таким образом, коллектор в генераторе постоянного тока (ГПТ) выполняет роль механического выпрямителя.
а) |
|
б) |
|
|
в) |
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
Ua |
|
|
|
|
2 |
|
|
|
а |
1 |
3 |
|
|
|
e |
|
|||
|
|
Ua |
|
|
|||
Е |
|
|
|
|
|
||
|
|
eпрпр. |
3 |
|
|
||
Eр |
eпр. |
а |
1 |
|
|
||
1 |
3 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
e4 |
|
|
eпр. |
|
|
|
|
|
|
|
|
|
|
|
|
eпрпр. |
|
|
|
|
|
|
|
|
eпр.,,ЕEр р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
аa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
tt |
|
|
|
|
|
U0 |
|
|
t |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
1 |
2 |
3 |
4 |
1 |
2 |
3 |
|
|
||||||
2 |
3 |
4 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ua |
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
U0 |
|
|
|
|
|
|
|
|
|
tt |
1 |
2 |
3 |
4 |
1 |
2 |
3 |
Рис. 1.4. ЭДС рамки, вращающейся в магнитном поле, на контактных кольцах (а), на щетках после коллектора (б) и двух рамок (в), сдвинутых в пространстве
7
Чтобы избавиться от переменной составляющей в кривой ЭДС на выходе ГПТ, нужно взять несколько рамок, сдвинутых равномерно по окружности. На рис. 1.4, в представлена кривая выпрямленной ЭДС для двух рамок, сдвинутых на 90 эл. град. Пренебречь пульсирующей составляющей можно уже при наличии на якоре более 6–7 рамок.
Если к щеткам (рис. 1.3, а) подключить нагрузочное сопротивление Rнг , то под действием ЭДС Ea Ua по замкнутому контуру «обмотка яко-
ря – Rнг » будет протекать ток нагрузки Ia . Напряжение ГПТ в этом случае будет: Ua Ea Ia ra , где ra – внутреннее сопротивление якорной цепи.
Направление тока в генераторе будет совпадать с направлением ЭДС (см. рис. 1.3, а, б) и на проводник с током, находящимся в магнитном поле, бу-
дет действовать сила fпр |
B l Ia , направление которой определяется по |
|
«правилу левой руки» (рис. 1.3, в). |
Две стороны рамки образуют пару |
|
сил, создающих в ГПТ |
тормозной |
электромагнитный момент Mэм |
2 fпр Da / 2 B l Ia Da , |
где Da – диаметр якоря. Таким образом, при- |
|
водной двигатель ПД при работе МПТ в режиме генератора будет преодолевать момент холостого хода M 0 , обусловленный потерями мощности в режиме холостого хода (трение в подшипниках, скользящих контактах и т. п.), и тормозной электромагнитный момент M эм , обусловленный то-
ком нагрузки якоря: Mв Mэм M0 Mэм Mв M0 , где M в – момент на валу от приводного двигателя. Схемы входной механической и выходной электрической цепей ГПТ показаны на рис. 1.5. Электромагнит-
ная мощность Pэм , как результат преобразования механической мощности
вэлектрическую, будет определяться как: Pэм Mэм B l Ia Da 2 n
2B l va Ia Ea Ia , где va Da n . Умножив в уравнении напряжения ГПТ
правую и левую часть на Ia , получим: Ua Ia Ea Ia Ia2ra Pэм pэл , т. е. мощность, вырабатываемая ГПТ, равна электромагнитной за вычетом электрических потерь в якорной цепи.
В режиме двигателя на щетки подается сетевое постоянное напряжение Uc Ua (рис. 1.6, а), под действием которого по рамке протекает
ток от «+» сетевого напряжения по якорной цепи к «–» сетевого напряжения. Взаимодействуя с созданным током возбуждения магнитным потоком, ток в проводниках рамки создает крутящий электромагнитный момент
Mэм B l Ia Da (рис. 1.6, б), и рамка приходит во вращение с частотой n .
Если на ось вращения рамки установить приводной механизм (ПМ), то вращающаяся рамка приведет его во вращение, при этом чем больший электромагнитный момент будет требоваться для вращения ПМ, тем
8
больший ток должен протекать по рамке. При вращении рамки на рис. 1.6, а коллекторные пластины через каждые пол-оборота переходят под щетки другой полярности и по рамке протекает переменный ток, изменяющийся с частотой f pn . Поэтому в двигателе постоянного тока
(ДПТ) коллектор выполняет роль механического инвертора. Благодаря та-
кой работе коллектора под полюсом одной полярности все время находятся токи одного направления и создается неизменный во времени вращающий электромагнитный момент M эм , который преодолевает момент
на валу M в (момент сопротивления ПМ) и момент холостого хода ДПТ
M 0 : Mэм Mв M0 .
а) |
а ) |
|
|
|
б) |
|
|
|
|
|
|
|
|
|
M |
в |
б ) |
iв |
I a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
n |
|
|
|
|
|
|
||
|
|
|
|
|
R |
|
|
|
|
|
||
|
|
|
|
|
|
нг |
|
|
|
|
||
|
|
|
П Д n |
|
E a |
U a |
|
|
|
|
||
|
M |
M 0 |
|
|
|
|
I |
|
I |
|
||
|
|
|
|
|
|
|
|
|
||||
|
эм |
n |
|
|
|
|
|
нг |
a |
|||
|
|
|
|
|
U в |
|
|
|
|
|||
|
Г П Т |
|
|
|
|
|
|
|
|
|||
|
n |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M эм M в M 0 |
|
U a E a I a ra |
|
|
|
|
|
||||
|
|
Рис. 1.5. Схемы механической (а) и электрической (б) цепей ГПТ |
|
|
|
|
||||||
а) |
|
|
|
|
|
б) |
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
iв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
Uв |
|
|
|
N |
iв |
B eпр. |
N |
|
iв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
iпр. |
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
B |
M |
эм |
iпр. Da |
fпр. |
eпр. |
|
v |
||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
1 |
|
|
3 |
n |
|
|
|
|
|
n |
|||||
|
|
|
|
|
|
|
|
fпр. |
|
fпр. |
iпр. |
n |
v |
eпр. |
|
|||
|
ia |
|
|
|
|
|
|
|
|
|
|
|||||||
|
i |
4 |
|
|
iв |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
S |
|
|
U |
|
|
|
S |
i |
|
S |
|
iв |
|||
|
|
|
|
a |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iв |
|
|
|
|
|
|
|
|
в |
|
|
|
|
в |
|
|
|
|
U |
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Mвв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПМ |
Uс |
ПМ |
|
|
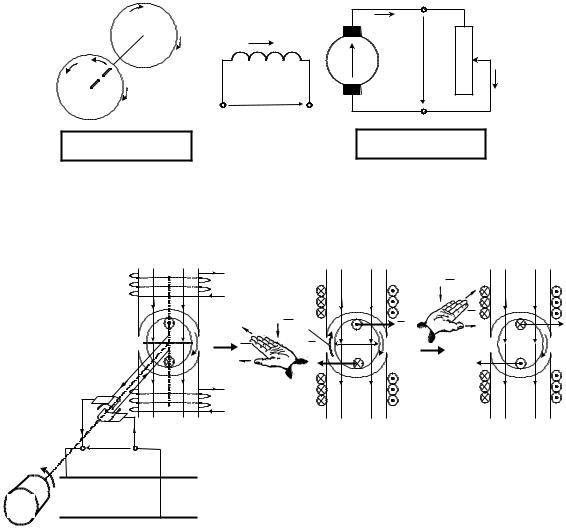
Рис. 1.6. МПТ в режиме двигателя (а):
определение крутящего электромагнитного момента (б) по правилу левой руки и направления ЭДС в обмотке якоря (в) по правилу правой руки
9

В проводниках вращающейся рамки возникают |
ЭДС (рис. 1.6, в) |
eпр B l va , складывающиеся в суммарную ЭДС рамки |
Eр 2eпр и дей- |
ствующие встречно току |
Ia . Напряжение сети, приложенное к обмотке |
|||||||||||
якоря, |
расходуется на преодоление ЭДС Ea и падение напряжения Ia ra : |
|||||||||||
Ua |
Ea Ia ra . |
Если умножить правую и левую часть на Ia , |
получим: |
|||||||||
U |
a |
I |
a |
P E I |
a |
I 2r P |
p , т. е. потребляемая ДПТ мощность из |
|||||
|
|
|
1 |
a |
a a |
эм |
эл |
|
|
|||
сети P |
расходуется на создание электромагнитной мощности P |
|
и элек- |
|||||||||
|
|
|
|
1 |
|
|
|
|
|
эм |
|
|
трические потери в обмотке якоря pэл . Электромагнитная мощность как
продукт |
преобразования |
электрической |
|
мощности в |
механическую: |
|
Pэм Ea Ia 2B l va Ia 2B l Da n Ia B l Ia Da 2 n M эм . |
|
|||||
Схемы входной электрической и выходной механической цепей ДПТ |
||||||
показаны на рис. 1.7. |
|
|
|
|
|
|
а) |
|
Uc |
|
б) |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
iв |
Ia |
|
|
M в |
|
|
|
|
|
|
||
|
|
|
|
|
n |
|
|
Ea |
Ua |
|
|
ПМ |
|
|
|
M |
|
|||
|
|
0 |
|
|||
|
Uв |
|
|
Mэм |
|
|
|
|
|
ДПТ n |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ua Ea Ia ra |
|
Mэм Mв M0 |
|||
Рис. 1.7. Схемы электрической (а) и механической (б) цепей ДПТ
При сопоставлении полученных соотношений для электрической и механической цепей МПТ в режимах прямого и обратного преобразования энергии видно, что в режиме генератора Ua Ea и Mэм Mв , а в режиме
двигателя Ua Ea и Mэм Mв . Регулируя величину Ea по отношению к Ua или величину M в по отношению к M эм , можно совершать плавный переход из двигательного в генераторный режим работы и обратно. При этом ток якоря Ia и электромагнитный момент M эм будут менять свое
направление (см. рис. 1.3 и 1.6).
В режиме электромагнитного тормоза (ЭМТ) может оказаться дви-
гатель постоянного тока в том случае, если момент приводного механизма станет больше электромагнитного, что приведет к остановке и вращению якоря ДПТ в противоположную сторону. На рис. 1.8, а, б показано, как
10