

Электрические машины. Давидчук, Лебедев. Конспект лекций
.pdfа) A |
B |
C |
Iф 
Iф 
б) |
A |
B |
C |
|
|
|
|
2Iф |
|
|
|
|
Iф |
|
|
Iф |
Iф |
Y 2pY=4pYY YY 2pYY
Рис. 3.18. Принципиальная схема соединения обмотки с переключением пар полюсов в отношении 2:1
Регулирование n осуществляется при данном способе большими ступенями, а не плавно как при частотном управлении. Многоскоростные двигатели имеют большие габариты, массу и стоимость по сравнению с двигателями нормального исполнения.
Регулирование частоты вращения АД изменением скольжения s возможно путем изменения величины питающего напряжения U1 и введе-
ние в цепь ротора добавочного сопротивления. Смысл этих способов ясен соответственно из рис. 3.13 и 3.14 и изложен по сути в предыдущем разделе.
Одно– и двухфазные асинхронные двигатели. По своему устрой-
ству одно– и двухфазные асинхронные двигатели аналогичны трехфазным АД и состоят из короткозамкнутого ротора и статора, в пазах которого уложены соответственно однофазная и двухфазная обмотки с 2p = 2.
При включении однофазной обмотки в сеть, она создает не вращающееся, а пульсирующее, неподвижное в пространстве магнитное поле [1– 4]. Это поле можно разложить на два вращающиеся с одинаковой частотой n1, но в противоположные стороны: прямое и обратное.
121
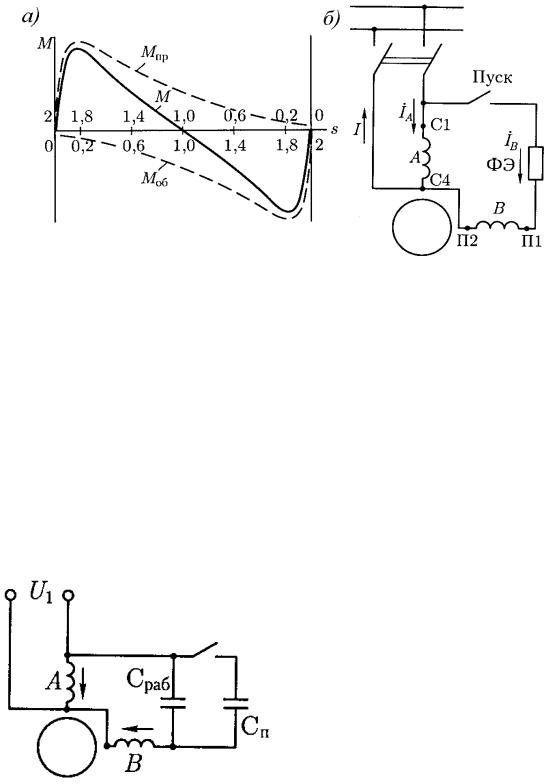
На рис.3.19, а приведены кривые моментов M ПР и M ОБ , обусловлен-
ных прямым и обратным полями, и результирующего электромагнитного момента M M ПР MОБ . Из анализа зависимости M f ( s ) видно, что при
Рис. 3.19 Механические характеристики однофазного двигателя (а) и
s 1 M 0 , то есть пусковой момент M П 0 . Чтобы этот момент появился, необходимо во время пуска создать вращающееся магнитное поле. Для этого помимо рабочей обмотки А применяют и пусковую В (рис.3.19, б). Эти обмотки располагают на статоре так, чтобы их оси были сдвинуты на 90 эл. градусов. Также должны быть сдвинуты на 90 по фазе и токи в обмотках I А и I В . Для этого применяют фазосдвигающий элемент (ФЭ), в качестве которого могут применять активное сопротивление, индуктивность или ёмкость.
Двухфазные асинхронные двигатели, которые чаще называют конденсаторными двигателями, имеют на статоре две обмотки, занимающие
одинаковое число пазов и их оси |
сдвинуты |
в |
пространстве на |
||
90 эл. градусов. Одну из обмоток – |
|||||
главную А – включают в однофаз- |
|||||
ную сеть, а вторую – вспомога- |
|||||
тельную В – включают в сеть через |
|||||
рабочую СРАБ |
и, в некоторых слу- |
||||
чаях, |
пусковую |
СП |
ёмкости |
||
(рис.3.20). Пусковая ёмкость обес- |
|||||
печивает круговое поле при пуске, |
|||||
а |
СРАБ |
при номинальном режиме. |
|||
Поэтому, в отличии от однофазных |
|||||
|
двигателей, которые после пуска |
Рис. 3.20 Схема конденсаторного |
работают при пульсирующем поле, |
|
122
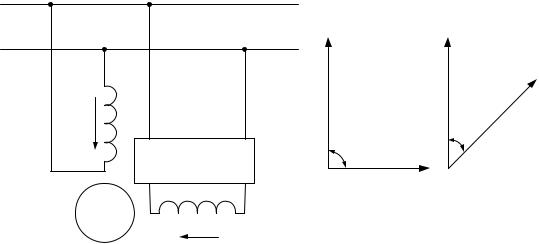
конденсаторные двигатели – при вращающемся и их свойства приближаются к трехфазным.
3.3 Асинхронные машины автоматических устройств.
Асинхронные исполнительные двигатели. Асинхронные исполни-
тельные двигатели (АИД) широко используются в системах автоматического управления и служат для преобразования подводимого к ним электрического сигнала в механическое перемещение вала. Их частота вращения n должна строго соответствовать подводимому напряжению и меняться при изменении его величины или фазы. Следовательно, АИД являются управляемыми двигателями. Они представляют собой асинхронные двигатели небольшой мощности ( 0,1 300 Вт) с двухфазной обмоткой статора и короткозамкнутым ротором (рис. 3.21).
а) |
U |
б) |
в) |
|
|
||
|
|
Uв |
Uв |
|
|
|
|
|
|
|
Uy |
|
|
|
|
|
|
В |
|
|
|
Uв |
|
|
|
/ 2 |
|
|
|
|
|
|
|
УУ |
Uy |
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
Uу |
|
Рис. 3.21. принципиальная схема асинхронного исполнительного двигателя (а) и векторные диаграммы при амплитудном (б) и фазовом (в)
управлении.
Одна из обмоток статора, называемая обмоткой возбуждения (В), подключается к сети переменного тока с постоянным действующим значением напряжения U в . Вторая обмотка называется обмоткой управления
(У) и питается напряжением U у , амплитуда (рис. 3.21б) или фаза (рис.
3.21в) которого изменяется под воздействием управляющего сигнала от управляющего устройства (УУ) на рис.3.21а. В первом случае управление называется амплитудным, а во втором – фазовым. В обоих случаях напряжение Uв и U у сдвинуты по фазе, в результате чего двигатель способен
развивать вращающий момент.
АИД проектируются таким образом, что круговое вращающееся поле в них возникает только при пуске, что обеспечивает получение большого пускового момента. Отсутствие самохода (необходимости самотормо-
123
жения и остановки при снятии напряжения U у ), устойчивая работа и ли-
нейность характеристик достигаются выбором настолько высокого активного сопротивления ротора ,что критическое скольжение АИД S КР лежит в диапазоне 3 4, а не 0,15 0,3, как у обычных асинхронных машин. Увеличение активного сопротивления ротора исполнительного двигателя приводит к снижению номинальной мощности в тех же габаритах в два-три раза.
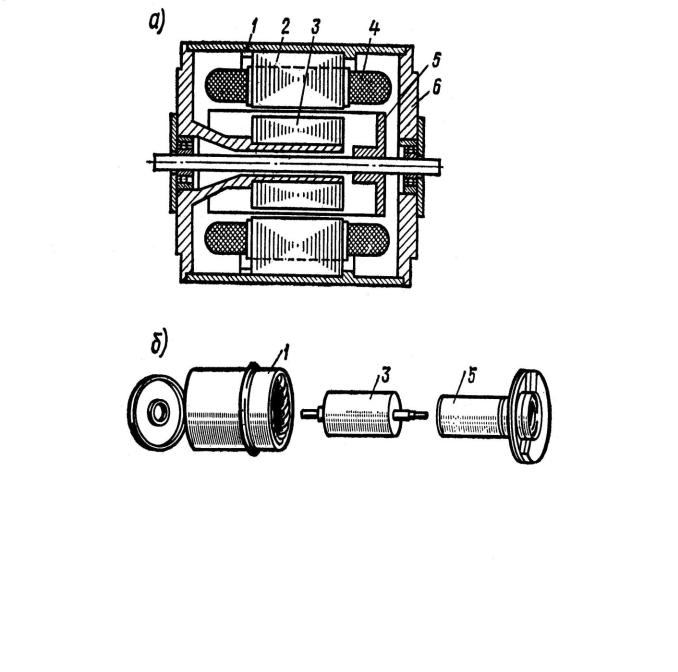
По конструкции АИД выпускаются или традиционного исполнения с “беличьей клеткой ” (рис. 3.3а) или с полым немагнитным или магнитным ротором. На рис.3.22 представлена конструкция исполнительного двигателя с немагнитным ротором. Он имеет внешний с обмоткой 2 и внутренний без обмотки 3 статоры из листовой электротехнической стали, между ко-
Рис.3.22. Конструкция исполнительного двигателя (а) и его основные узлы (б).
1 – корпус, 2 – внешний статор, 3 – внутренний статор, 4 – обмотка статора, 5 – ротор, 6 – подшипниковый шит.
124
торыми вращается тонкостенный (0,2 1,0 мм) ротор из алюминиевого сплава , имеющего форму стаканчика. Естественно, что такой ротор имеет малую механическую инерцию и поэтому АИД обладает большим быстродействием. Однако немагнитный зазор между статорами большой (0,6 1,2 мм) по сравнению с зазором (0,1 0,2мм) у исполнительных двигателей с “беличьей клеткой”, что приводит к уменьшению КПД и коэффициента мощности ,а также увеличению габаритов и веса.
Иногда ротор выполняется стальным. При этом внутренний статор не требуется и конструкция упрощается, но поскольку стальной ротор имеет значительно большее активное сопротивление и вес по сравнению с алюминиевым ротором, то естественно, что у исполнительных двигателей с магнитным ротором КПД и быстродействие будут ниже чем у АИД с немагнитным ротором.
Асинхронные тахогенераторы. В устройствах автоматики тахогенератор является измерительным элементом частоты вращения n и действует на определённый элемент схемы через ЭДС, индуктируемую в одной из его обмоток. Тахогенераторы на переменном токе можно выполнять на базе синхронных и асинхронных машин. Если в синхронном генераторе держать постоянным ток возбуждения, то ЭДС, наведённая в статорной обмотке, будет пропорциональна частоте вращения. Частота f наведённой ЭДС будет переменной, то есть определяться частотой вращения n управляемого или исследуемого объекта, что является недостатком синхронных тахогенераторов. Поэтому, значительно большее распространение получили асинхронные тахогенераторы, в которых индуцированная ЭДС вращения имеет постоянную частоту f .
Конструктивно асинхронный тахогенератор представляет из себя АИД с полым немагнитным ротором, у которого обмотка управления, называемая в тахогенераторе генераторной Г (рис. 3.23а), подключается к нагрузке zНГ в виде измерительного прибора или элемента системы автоматического регулирования. Обмотка возбуждения В запитывается от сети с Uв const , f const и создает пульсирующий поток в . При неподвижном
роторе (рис.3.23б) этот поток индуцирует в роторе ЭДС трансформации, в результате чего в роторе возникнут токи, создающие свой магнитный поток, действующий по оси обмотки В. Этот поток не будет сцеплён с генераторной обмоткой Г, так как их оси сдвинуты в пространстве на 90 0 . Поэтому при n =0 и U Г 0 .
При вращении ротора в нём индуцируется также и ЭДС вращения, которая создаст, дополнительно к старой (рис. 3.23б), свою систему токов (рис. 3.23в), поток Г от которых направлен по оси генераторной обмотки Г. Этот поток пульсирует с частотой тока обмотки возбуждения и ин-
125
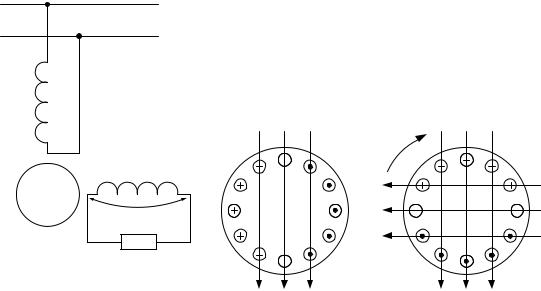
дуктирует в генераторной обмотке ЭДС EГ , величина которой практически пропорциональна частоте вращения n .
|
Uв |
|
|
а) |
B |
б) |
в) |
|
|||
|
|
ФВ |
ФВ |
|
|
n=0 |
n |
|
|
|
|
|
|
Г |
|
|
|
UГ |
ФГ |
|
|
|
|
|
|
zн |
|
Рис.3.23. Принципиальная схема (а) асинхронного тахогенератора и распределение в роторе токов трансформации (б) и вращения (в).
4. Синхронные машины
4.1. Устройство, принцип действия и физические особенности работы синхронной машины
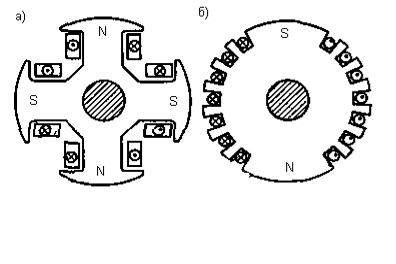
Конструкция ротора. Как уже отмечалось выше, все машины переменного тока имеют одинаковую конструкцию неподвижной части, именуемой статором, но отличаются устройством вращающейся части, именуемой ротором. Явнополюсная синхронная машина (СМ) имеет на роторе явно выраженные сердечники полюсов (рис.4.1.а) с полюсными наконечниками и сосредоточенной обмоткой возбуждения, выполненной в виде катушки, надетой на сердечник полюса. В этом случае магнитная проводимость воздушного зазора в зоне полюсного наконечника намного выше, чем в зоне межполюсного пространства. Неявнополюсная СМ (рис.4.1.б) имеет неявно выраженные полюсные зоны на сердечнике ротора в виде беспазовых участков (до 1/3 полюсного деления), именуемые главным зубом, и зубцовый слой (до 2/3 полюсного деления), в пазах которого размещается распределенная обмотка возбуждения. Воздушный зазор в этом случае по всей окружности остается неизменным, а магнитная проводимость зазора по всем радиальным направлениям – практически одинаковой. Пита-
126
|
ние |
обмотки возбужде- |
||
|
ния в обоих случаях мо- |
|||
|
жет быть либо незави- |
|||
|
симым, осуществляемым |
|||
|
через контактные кольца |
|||
|
от постороннего |
источ- |
||
|
ника |
постоянного |
тока, |
|
|
либо |
организовано |
по |
|
|
системе косвенного |
са- |
||
|
мовозбуждения, когда на |
|||
Рис.4.1. Конструкция ротора явнополюсной (а) |
валу синхронной маши- |
|||
и неявнополюсной (б) СМ |
ны устанавливается воз- |
|||
|
будитель (генератор по- |
|||
стоянного тока небольшой мощности). Организация прямого самовозбуждения предполагает питание обмотки возбуждения от обмотки якоря (статора) через выпрямитель и контактные кольца. Мощность, расходуемая на возбуждение, не превышает (3 5) % от номинальной мощности машины. В СМ небольшой мощности достаточно широко распространено также и магнитоэлектрическое возбуждение (от постоянных магнитов). Полюсные наконечники синхронных машин могут иметь пазы с размещенной в них короткозамкнутой клеткой, аналогичной короткозамкнутой клетке асинхронных двигателей. Эту обмотку в зависимости от режима работы называют успокоительной (демпферной) или пусковой. При вращении ротора синхронно с полем статора эта обмотка не оказывает влияния на работу синхронной машины.
Принцип действия. В режиме генератора ротор синхронной ма-
шины приводится во вращение внешним приводным двигателем (турбина, дизель, эл. двигатель), при этом стремятся поддерживать постоянной номинальную частоту вращения n n1 , т.к. она определяет частоту тока син-
хронного генератора ( f1 pn1 об / с ). При питании обмотки возбуждения постоянным током iв в воздушном зазоре возникает вращающийся с частотой n1 магнитный поток возбуждения в , который пересекает лежащие в
пазах сердечника статора проводники m-фазной, распределенной по окружности, обмотки. Согласно закону электромагнитной индукции в проводниках возникает ЭДС (ЭДС движения), а на зажимах синхронной машины появляется m-фазная система напряжений. При подключении к зажимам m-фазной нагрузки по обмотке статора начинает протекать m- фазная система токов, которая создает свое вращающееся с частотой n1 f1 / p поле (поле реакции якоря) a . Два синхронно вращающихся по-
тока в и a образуют общий вращающийся поток . В режиме генератора поле ротора является ведущим по отношению к результирующему
127
полю. Чем больше ток нагрузки, тем больше угол сдвига между осями поля ротора и результирующего поля в зазоре машины. Этот угол близок по своей величине к углу сдвига между ЭДС Eв и напряжением U1 , име-
нуемому углом нагрузки синхронной машины. При опережении ротором результирующего вращающегося поля на ротор будет действовать тормозящий электромагнитный момент, тем больший, чем больше угол опережения (угол нагрузки ). В режиме двигателя m-фазная обмотка статора подключается к системе m-фазного сетевого напряжения, под действием которого по обмотке протекает m-фазная система токов, создающая в воздушном зазоре вращающееся с частотой n1 f1 / p магнитное поле a . При
питании обмотки возбуждения постоянным током iв , поток возбужденияв взаимодействует с потоком a . Это приводит к возникновению элек-
тромагнитного момента, действующего на ротор, что возможно только при синхронном вращении ротора с полем статора. В этом случае потоки в и
a образуют общий вращающийся поток . В режиме двигателя резуль-
тирующий поток является ведущим, а поле ротора ведомым (угол нагрузки 0 ). При несовпадении частоты вращения поля статора и частоты вращения ротора («выпадение из синхронизма») на ротор будет действовать знакопеременный момент, что приведет к возникновению недопустимых токов в обмотке статора и динамических нагрузок на валу ротора. В явнополюсной СМ электромагнитный момент будет возникать и при отсутствии тока возбуждения. Он будет обусловлен различной магнитной проводимостью по окружности ротора. В режиме двигателя в обмотке статора будет возникать ЭДС Eв от вращающегося поля возбуждения ротора
в , встречно направленная к приложенному к обмотке статора сетевому напряжению U1 .
Магнитное поле синхронной машины в режиме холостого хода.
Этот режим возникает при отсутствии тока Ia в обмотке статора (обмотке
якоря), поэтому поле в воздушном зазоре будет обусловлено только током iв , протекающим по обмотке возбуждения. Магнитная цепь синхронной
машины в режиме холостого хода представлена на рис.4.2. Строгая постановка задачи расчета такой магнитной цепи предполагает использование закона полного тока, однако в инженерной практике пользуются упрощенной моделью. Множество силовых линий магнитного поля заменяется одной усредненной эквивалентной линией (см. рис.4.2). Магнитная цепь разбивается на участки с постоянными магнитными свойствами. По известным для каждого участка кривым намагничивания ( B f H ) определяют-
ся НС каждого участка и суммарная НС Fв . На участках, находящихся на
роторе, учитывается поле рассеяния катушек возбуждения. Наиболее напряженными участками магнитной цепи в отношении насыщения стали
128

являются зубцовые зоны статора и ротора. При проектировании стремятся к тому, чтобы индукция магнитного поля в зубцах не превышала уровня 2,3 2,4 Tл для номинального режима. Пульсации магнитного поля, обусловленные зубчатостью статора и ротора, учитывают с помощью коэффициента воздушного зазора k [1,2,3,4]. Для обеспечения не-
обходимой синусоидальности распределения поля вдоль полюсного деления , воздушный зазор под полюсным башмаком в явнополюсной
машине может быть неравномерным (расходящимся). По данным расчета магнитной цепи может быть построена магнитная характеристика машины (зависимость f Fв ) и определен коэффициент насыщения магнитной
цепи, равный отношению полной НС обмотки возбуждения к НС воздушного зазора : k Fв / F . Для машин нормального исполнения k = 1,2
1,35.
Магнитное поле синхронной машины при нагрузке. Режим нагрузки характеризуется появлением тока Ia в m-фазной обмотке статора.
Этот ток создает свое собственное магнитное поле a , именуемое полем
реакции якоря. Поскольку явнополюсная синхронная машина имеет сильно различающуюся магнитную проводимость воздушного зазора под полюсным наконечником и в межполюсном пространстве, то поле реакции якоря принято рассматривать в системе двух взаимноперпендикулярных (в эл. градусах) осей d и q, где ось d проходит по оси полюса ротора, а ось q –
|
|
. |
. |
. |
по оси межполюсного пространства: a ad aq .Так как оси d и q взаим- |
||||
|
. |
|
. |
|
ноперпендикулярны, то потоки |
ad |
и |
aq |
не должны влиять друг на дру- |
га.
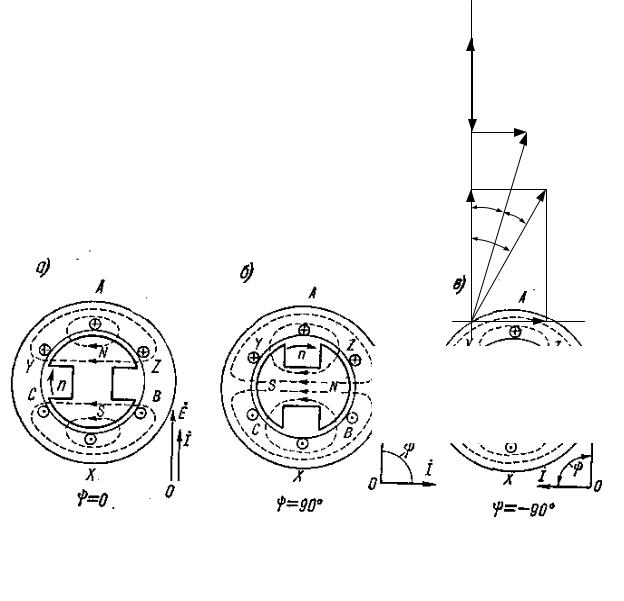
На рис.4.3 представлены три характерных случая реакции якоря в синхронном генераторе: поперечная при активной нагрузке, продольная размагничивающая при индуктивной нагрузке, продольная намагничивающая при емкостной нагрузке. В общем случае нагрузка синхронной ма-
|
|
|
|
|
|
. |
. |
шины носит смешанный характер и магнитный поток a , НС F a , ЭДС |
|||||||
. |
|
. |
|
|
|
|
|
E a , |
ток |
I a |
могут |
быть |
представлены в виде двух |
составляющих: |
|
. |
. |
. . |
. |
. . |
. |
. . . . |
|
a ad aq , F a F ad |
F aq , Ea Ead Eaq , I a I d I q . |
|
|||||
129
Уравнения электродвижущих и намагничивающих сил син-
хронной машины. Уравнение напряжений обмотки статора СМ можно записать следующим образом
|
|
|
|
|
. |
|
. |
. . |
. |
. |
|
|
|
|
|
|
|
|
U1 |
Eв Ead Eaq Ea Ia ra , |
|
|
|
|
|||||
где |
. |
– напряжение сети («+»- для генератора, « - » - для двигате- |
||||||||||||
U1 |
||||||||||||||
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ля), E в |
–ЭДС , наводимая в обмотке статора полем обмотки ротора; |
|||||||||||||
. . |
– продольная и поперечная составляющие ЭДС от поля реакции |
|||||||||||||
Ead , Eaq |
||||||||||||||
|
. |
|
|
|
|
|
|
|
|
|
. |
|
|
|
якоря; |
E a - ЭДС рассеяния от поля реакции якоря; |
I a ra |
– падение напря- |
|||||||||||
жения на активном сопротивлении обмотки статора. Выразив ЭДС от поля |
||||||||||||||
реакции якоря через ток |
. |
и |
соответствующие индуктивные сопротив- |
|||||||||||
Ia |
||||||||||||||
|
|
. |
. . |
|
|
|
. . |
|
. |
|
|
|
|
|
ления |
( Ead jxad I d , Eaq |
jxaq I q , Ea jxa I a |
), |
|
|
|
получим |
|||||||
выражение |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
. |
|
. |
|
. |
|
. |
. |
. |
|
|
|
|
|
|
U1 |
Eв jxad I d jxaq I q jxa I a ra I a . |
|
|
|
|||||||
Если ввести понятия синхронных индуктивных сопротивлений по |
||||||||||||||
продольной и поперечной осям ( xd xad xa , xq |
xaq xa ), |
то |
уравнение |
|||||||||||
напряжений |
примет вид |
|
|
|
|
|
|
q |
|
|
||||
. |
. |
. |
. |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
U1 Eв jxd I d jxq I q ra I a |
0.0 |
|
|
( |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
4.1 ) |
|
Eв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jI |
x |
|
|
Пренебрегая теперь весьма малым паде- |
|
|
|
|||||||||||
|
|
d |
d |
|
||||||||||
|
|
|
|
|
||||||||||
нием напряжения на активном сопротивле- |
|
|
jI |
x |
|
|||||||||
|
|
|
. |
|
|
|
|
|
|
|
|
|||
нии обмотки статора ra I a , можно построить |
|
|
q |
q |
|
|||||||||
|
|
|
|
|
||||||||||
упрощенную |
векторную |
диаграмму |
ЭДС |
|
|
|
|
|
||||||
(рис.4.4) |
синхронного генератора, |
работаю- |
|
|
|
U |
Ia |
|||||||
|
|
|
|
|||||||||||
щего на активно-индуктивную нагрузку. |
|
|
|
|
||||||||||
|
Iq |
|
||||||||||||
Уравнение НС синхронной машины описы- |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Id |
d |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.4 Упрощенная диа- |
||||
|
|
|
|
|
|
|
|
|
|
грамма ЭДС СГ при актив- |
||||
|
|
|
|
|
|
|
|
|
|
но-индуктивной нагрузке |
||||
Рис.4.3. Магнитное поле реакции якоря СМ: поперечное (а), продольное размагничивающее (б) и продольное намагничивающее (в).