

Электрические машины. Давидчук, Лебедев. Конспект лекций
.pdfНа основании закона полного тока работа магнитной цепи описывается нелинейной зависимостью f F , для которой при условии, что
переключение секций обмотки якоря происходит строго на линии геометрической нейтрали и Fad (Ia ) 0 , будет справедливо выражение:
F Fш iв Fс Ia Faq Ia . |
(1.19) |
Связь магнитной и механической цепей описывается соотношением для электромагнитного момента M эм , полученным на основании закона Ампера:
|
|
|
|
|
M 2 p f |
|
|
Da 2 p B l i Da |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
N / 2 p |
|
|
|
|
|
|
N / 2 p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эм |
|
|
|
|
|
k 1 |
|
пр k |
2 |
|
|
k 1 |
k a 2 |
B |
(1.20) |
|||||||
|
|
|
|
|
pl i ( 2 p ) |
|
B pl ( Ia |
) ( 2 p ) N |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
N / 2 p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
k 1 |
|
k |
|
|
2a |
|
|
2 p |
|
ср |
|
|||||||
|
|
pI |
a |
N |
|
pN |
|
|
|
|
c |
cM Ia M эм cM Ia , |
|||||||||||||||
|
|
|
|
B срl |
|
|
|
Ia |
|
E |
Ia |
||||||||||||||||
|
2 a |
|
|
||||||||||||||||||||||||
|
|
|
2 a |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||
где |
fпр k |
B k l ia – |
сила, |
действующая на k-й проводник обмотки якоря, |
|||||||||||||||||||||||
ia Ia /(2a) – ток в k-м проводнике, равный току параллельной ветви обмотки якоря, cM cE /(2 ) pN /(2 a) – постоянный для каждой данной
машины коэффициент. С точки зрения физики выражение (1.20) целесообразнее представлять как
|
|
pN |
|
1 |
|
|
Mэм cM Ia |
|
|
|
(2aia ) |
|
( p )(Nia ) , |
|
2 |
|||||
|
|
2 a |
|
|
||
т. е. электромагнитный момент в МПТ получается от взаимодействия магнитного потока всех полюсов ( p ) с током всех проводников обмотки якоря ( Nia ). Работа механической цепи МПТ подчиняется первому закону Ньютона:
Mэм Mc Mдин , |
(1.21) |
где Mc Mв M0 – статический момент на валу МПТ («+» соответствует
режиму двигателя, «–» – режиму генератора), |
M |
|
J |
d |
|
– динамиче- |
|
дин |
dt |
||||||
|
|
|
|
||||
|
|
|
|
|
|||
ский момент МПТ ( Mдин 0 при const ), J |
– момент инерции враща- |
||||||
ющихся частей ДПТ. В установившемся режиме: |
|
|
|
|
|
||
Mэм Mв M0 . |
|
|
|
|
|
(1.22) |
|
41
Знание пяти указанных соотношений обычно бывает достаточным для инженерного анализа характеристик МПТ в режимах генератора, двигателя и электромагнитного тормоза. В переходных режимах работы состояние МПТ должно описываться системой дифференциальных уравнений второго порядка, количественный анализ которых производится с помощью современной вычислительной техники. Такие методы имеют, как правило, высокую степень достоверности (в зависимости от допущений, принятых при постановке задачи расчета), но мало пригодны для понимания физических процессов, происходящих в переходных режимах. Менее точными в количественном отношении, но более удобными для понимания происходящих переходных процессов являются методы раздельного анализа электромагнитных и механических процессов в МПТ, поскольку переходные процессы в электрических и магнитных цепях протекают во много раз быстрее, чем в механических цепях. Это позволяет рассматривать переходные процессы в электрических цепях генератора постоянного тока, считая частоту вращения якоря неизменной, и наоборот, рассматривать переходные процессы в двигателе постоянного тока, считая, что процессы в электрических и магнитных цепях происходят практически мгновенно.
1.2. Работа машины постоянного тока в режиме генератора
Условия самовозбуждения ГПТ. Как уже говорилось выше, спосо-
бы возбуждения МПТ принято разделять на магнитоэлектрический (с помощью постоянных магнитов (ПМ)) и электромагнитный (с помощью катушек постоянного тока, расположенных на сердечниках главных полюсов), который, в свою очередь, можно разделить на независимое и самовозбуждение (параллельное (шунтовое), последовательное (сериесное) и смешанное (компаундное) – см. рис. 1.12). При параллельном, последовательном и смешанном возбуждении обмотки возбуждения не получают внешнего питания. Для примера рассмотрим шунтовое возбуждение
(рис. 1.12, в). При изменении тока возбуждения во времени для шунтовой |
|||
цепи можно записать: Uв |
iв rв Lв diв / dt |
, где Lв – индуктивность об- |
|
мотки возбуждения. |
|
|
|
На |
рис. 1.30 представлена характеристика холостого хода ГПТ |
||
Ua f iв |
Uв при Ia |
0 (аналогичная |
магнитной характеристике |
0 f F0 – см. рис. 1.11). Из рис. 1.30 следует, что при iв 0 на зажимах якоря будет существовать остаточное напряжение Uост (остаточная ЭДС Eост возникает при вращении якоря в остаточном магнитном потокеост ). Под действием Uост по цепи возбуждения начнет протекать началь-
42
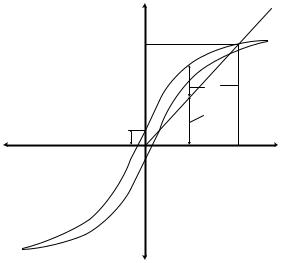
ный ток возбуждения iв.нач и возникнет магнитный поток нач . Если обмотка возбуждения включена согласно с остаточным потоком ост , то она создаст дополнительное подмагничивание (потоки ост и нач сложатся)
и процесс начнет развиваться согласно рис. 1.30, т. е. прирост магнитного потока будет создавать прирост ЭДС, которая создает прирост тока возбуждения и следующий прирост потока. Этот процесс закончится, когда
Lв diв / dt 0 (процесс самовозбуждения ограничивается нелинейностью
магнитной характеристики ГПТ). |
Угол |
наклона прямой |
Uв iв rв на |
рис. 1.30 зависит от величины rв . |
При rв |
rв.кр прямая Uв |
rв.крiв стано- |
вится касательной к кривой намагничивания и процесса самовозбуждения не происходит.
|
|
|
|
r в |
|
Ua |
Uв |
|
i |
в |
|
U |
|
|
Ua f(iв) |
||
|
|
в |
|
||
Uaн |
|
|
|
||
|
|
|
|
|
|
|
|
diв |
|
|
|
|
|
Lв dt |
|
|
|
Eост. |
iв rв |
|
|
i в |
|
|
|
|
|
||
|
|
iв 0 |
|
|
|
Рис. 1.30. Процесс самовозбуждения ГПТ |
|||||
с параллельным возбуждением |
|
||||
Таким образом, для осуществления процесса самовозбуждения в шунтовом ГПТ необходимо выполнение следующих трех условий: наличие остаточного магнитного потока, согласное включение обмотки возбуждения с остаточным магнитным потоком, наличие в цепи возбуждения сопротивления ниже критического. Самовозбуждение сериесного ГПТ происходит аналогично, но только при замкнутой цепи обмотки якоря (т. е. в режиме нагрузки). Самовозбуждение ГПТ со смешанным возбуждением происходит в режиме холостого хода с помощью обмотки параллельного возбуждения, а последовательная обмотка возбуждения уже при нагрузке ГПТ усиливает (при согласном включении) или ослабляет (при встречном
43
включении) магнитное поле, созданное параллельной обмоткой при холостом ходе.
Работа ГПТ на автономную нагрузку. При анализе генераторных режимов МПТ обычно предполагается, что приводной двигатель обладает достаточным запасом мощности и при любых изменениях нагрузки обеспечивает постоянную частоту вращения n nн const . В этом случае для
изучения особенностей работы МПТ в режиме генератора достаточно знания и понимания соотношений (1.17), (1.18) и (1.19). Согласно этим уравнениям ГПТ имеет три независимых внешних параметра: напряжение на зажимах якорной цепи Ua , ток в якорной цепи Ia , равный току нагрузки (
Ia Iнг ), и ток возбуждения iв шунтовой цепи возбуждения (ГПТ с последовательным возбуждением будет иметь соответственно только два независимых внешних параметра Ua и Ia Iв Iнг ). Из этого следует, что ГПТ может иметь три направления характерных зависимостей: Ua f (iв )
при условии Ia const |
(характеристика холостого хода при Ia 0 и се- |
||
мейство нагрузочных |
характеристик при различных значениях Ia 0), |
||
iв f (Ia ) |
при условии Ua const (характеристика короткого замыкания |
||
Ia f (iв ) |
при Ua 0 |
и семейство регулировочных характеристик при |
|
Ua 0 ) и |
семейство |
внешних характеристик |
Ua f (Ia ) при условии |
iв const |
(независимое возбуждение) или Rв |
const (нерегулируемая |
|
цепь возбуждения при самовозбуждении). ГПТ с последовательным возбуждением (сериесный ГПТ) может иметь из всего указанного набора характеристик соответственно только одну внешнюю.
Эксплуатационные характеристики ГПТ описывают его свойства в режимах нагрузки при различных условиях эксплуатации. Как правило, различают два основных эксплуатационных режима: режим нерегулируемого генератора и режим регулируемого генератора.
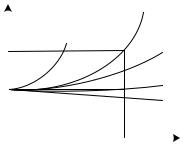
Внешняя характеристика (зависимость Ua f Ia при Rв const
показывает, как будет изменяться напряжение на зажимах ГПТ при изменении тока нагрузки Iнг Ia и нерегулируемой цепи возбуждения ( Rвconst) . Для генератора независимого возбуждения (рис. 1.31, а) условие Rв const эквивалентно условию iв const . В этом случае (кривая 1 на рис. 1.32, а) при увеличении тока нагрузки Ia напряжение Ua согласно (1.17) будет снижаться из-за роста падения напряжения в якорной цепи Ia Ra и уменьшения ЭДС Ea из-за усиления размагничивающего действия поперечной реакции якоря Faq Ia в (1.19).
44
а) |
б) |
Rнг |
Rнг |
Ua
Ia Iнг
Я1 |
Я 2 |
ПД |
|
Ш1 |
|
|
|
n const U |
|
i |
|
в |
в |


 Ш2
Ш2
Rв
Ua
Ia
Я1 |
Я 2 |
ПД Ш1
n const |
i в |
Ш2
Rв
в) |
г) |
Rнг |
Rнг |
|
|
|
Ua |
Ua |
|||
|
|
|
|
С1 |
|
|
С1 |
I |
в |
I |
a |
С2 |
Iв Iнг |
|
С2 |
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
Ia Iнг |
|
I |
a |
|
|
|
|
|
|
|
|
|
Я1 |
Я 2 |
Я1 |
Я 2 |
ПД |
|
Ш1 |
|
ПД |
iв |
||
n const |
|||
|
Ш2 |
||
|
n const |
||
|
|
Rв |
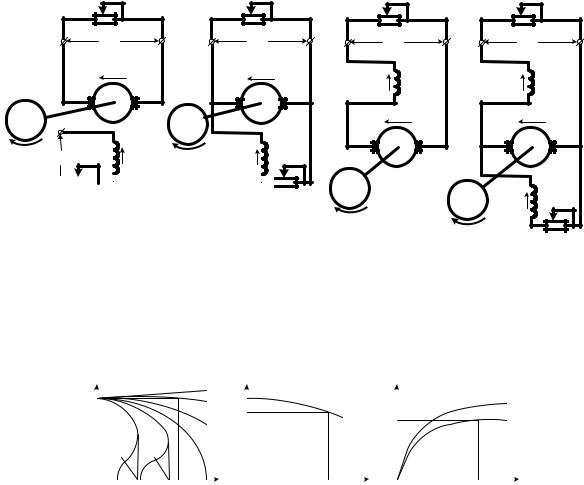
Рис. 1.31. Схемы включения ГПТ на автономную нагрузку при различных способах электромагнитного возбужения:
независимом (а), параллельном (б), последовательном (в), смешанном (г)
а) б) в)
|
U |
|
Ua |
|
|
|
|
|
|
6 |
U0 |
|
Ua |
|
|
|
|
|
|
Ua |
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
н |
|
|
|
|
|
|
|
|
5 |
|
|
|
7 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Uн |
|
|
|
|
|
|
|
|
|
|
9 |
|
||
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
U |
|
|
|
|
|
|
|||
|
|
|
|
|
3 |
2 |
|
1 |
|
|
|
|
|
|
н |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Iкр.3 |
Iкр.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
Ia |
|
|
|
|
|
Ia |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0I |
кз 3 |
I |
кз 2 |
|
I |
н |
I |
кз |
0 |
I |
н |
|
|
0 |
I |
н |
|
|
|||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
Рис. 1.32. Внешние характеристики ГПТ |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
при различных способах возбуждения |
|
|
|
|
||||||||||||
В ГПТ параллельного возбуждения |
(рис. 1.31, б) к двум указанным |
||||||||||||||||||||||||
факторам |
добавляется |
непостоянство |
тока возбуждения: |
iв Uв / Rв |
|||||||||||||||||||||
Ua / Rв |
(кривая 2 на рис. 1.32, а). Так как с увеличением тока нагрузки Ia |
||||||||||||||||||||||||
напряжение Ua падает, |
то снижается и iв , и в итоге Ua |
уменьшается еще |
|||||||||||||||||||||||
быстрее. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В ГПТ смешанного возбуждения (рис. 1.31, г) к трем указанным фак- |
|||||||||||||||||||||||||
торам добавляется четвертый – НС сериесной обмотки Fc |
Ia в (1.19). |
||||||||||||||||||||||||
Если последовательная обмотка включена встречно к основному потоку (Fc Ia в (1.19)), то она будет создавать дополнительное размагничивание с ростом нагрузки и кривая 3 на рис. 1.32, а пройдет еще ниже.
45
При согласном включении ( Fc Ia в (1.19)) сериесная обмотка,
наоборот, создаст дополнительное подмагничивание с увеличением тока нагрузки и тем самым начнет компенсировать падение напряжения Ua (кривая 4 на рис. 1.32, а), обусловленное ростом Ia Ra в (1.17) и ростомFaq Ia в (1.19). Увеличивая НС Fc Ia , можно добиться полной ком-
пенсации указанных факторов и при изменении тока нагрузки напряжение на выходе ГПТ будет изменяться в очень небольших пределах (кривая 5 на рис. 1.32, а). Такой генератор очень удобен в эксплуатации, так как не требует дополнительных устройств регулирования тока возбуждения при из-
менении нагрузки. При дальнейшем увеличении НС Fc Ia (кривая 6 на рис. 1.32, а) напряжение Ua на выходе генератора начнет возрастать с ро-
стом тока нагрузки, что может оказаться крайне нежелательным и даже опасным для потребителя.
Встречное и согласное включение последовательной обмотки на практике определяется по величине тока возбуждения при номинальной нагрузке по отношению к току возбуждения с выключенной сериесной обмоткой или по степени снижения напряжения Ua с ростом тока нагрузки в
том и другом случае, поскольку получить номинальный ток нагрузки в ГПТ с параллельным и особенно со смешанным встречным возбуждением не всегда удается.
Снижение тока нагрузки после достижения критического значения Iкр (см. кривые 2 и 3 на рис. 1.32, а) можно объяснить следующим обра-
зом. Напряжение на зажимах генератора при подключении нагрузки Rнг
можно определить как Ua Ea Ia Ra Ia Rнг , откуда |
Ia Ea /(Rнг Ra ) . |
Из этого соотношения видно, что при уменьшении Rнг |
будет увеличивать- |
ся ток Ia . Однако с ростом Ia происходит и одновременное снижение ЭДС Ea из-за размагничивающего действия поперечной реакции якоряFaq Ia в (1.19) и из-за снижения тока возбуждения при параллельном возбуждении и соответственно снижения НС Fш (iв ) в (1.19). В точке Ia Iкр ЭДС Ea начинает уменьшаться быстрее, чем Rнг , что и приводит к уменьшению тока Ia .
Номинальным изменением напряжения ГПТ под нагрузкой (кривая 7
на рис. 1.32, б) называется величина: U |
% |
U |
0 |
U |
н |
/U |
|
100 % . В ма- |
|
|
|
|
н |
|
шинах нормального исполнения при независимом возбуждении оно составляет обычно 15–25 %. Обычно говорят, что чем меньше U% , тем
46
жестче внешняя характеристика генератора, а чем больше U% , тем она мягче.
В генераторе последовательного возбуждения Iв Ia и вместо трех независимых переменных остается только две, Ua и Ia , и соответственно
только одна (внешняя) характеристика, представленная на рис. 1.32, в (кривая 9). Вид этой характеристики обусловлен параллельно протекающим процессом самовозбуждения, поэтому аналогичен кривой холостого хода (кривая 8), но отклоняется от нее с ростом нагрузки вправо из-за падения напряжения в якорной цепи и размагничивающего действия поперечной реакции якоря. Внешняя характеристика ГПТ последовательного возбуждения непригодна для большинства потребителей, поэтому такой ГПТ может использоваться только в специальных установках. В этот режим может перейти также и сериесный ДПТ при электродинамическом торможении.
На рис. 1.33 представлены регулиро-
вочные характеристики (зависимости iв |
|
iв |
|
|
|||
|
|
|
|||||
f Ia |
при |
Ua Uн const ), которые |
|
3 |
1, 2 |
|
|
iвн |
|
|
|||||
показывают, как нужно регулировать ток |
|
4 |
|
||||
|
|
|
|||||
возбуждения при изменении тока нагруз- |
iв0 |
|
5 |
|
|||
|
6 |
|
|||||
ки, чтобы напряжение на выходе ГПТ |
|
|
|
||||
оставалось неизменным (кривая 1, 2 – не- |
|
|
Ia |
||||
зависимое и параллельное возбуждение, |
|
|
|
|
|||
0 |
|
Iн |
|||||
кривая 3 |
– |
смешанное возбуждение со |
Рис. 1.33. Регулировочные |
||||
встречным включением последовательной |
|||||||
характеристики ГПТ при различных |
|||||||
обмотки, кривые 4, 5 и 6 – смешанное воз- |
|||||||
|
способах возбуждения |
||||||
|
|
|
|
||||
буждение с согласным включением после- |
|
|
|
|
|||
довательной обмотки).
Характер этих зависимостей определяется видом соответствующих внешних характеристик на рис. 1.32, а. Если напряжение генератора падает с ростом нагрузки, то необходимо повышать ток возбуждения iв , чтобы
увеличить ЭДС в якорной обмотке за счет повышения Fш (iв ) в (1.19). Однако из-за насыщения магнитной цепи диапазон изменения тока возбуждения iв% (iвн iв0 ) / iвн 100 % в регулировочных характеристиках может существенно превышать диапазон изменения напряжения U% во
внешних характеристиках.
Следует обратить внимание на то, что, несмотря на различие во внешних характеристиках, ГПТ при независимом и параллельном возбуждении имеет одинаковую регулировочную характеристику. Это объясняется условием снятия регулировочной характеристики: Ua Uн const .
47
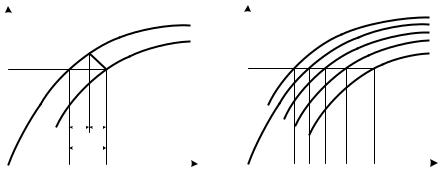
Опытные характеристики представлены на рис. 1.34. Характери-
стику холостого хода (зависимость Ua f iв при Rнг , т. е. при Ia 0) целесообразнее снимать при независимом возбуждении, так как
путем изменения полярности возбуждения можно получить характеристику в двух квадрантах (как показано на рис. 1.30). При шунтовом и компаундном возбуждении характеристика холостого хода снимается только в первом квадранте, а при сериесном возбуждении снять ее невозможно,
так как при |
Ia 0 процесс самовозбуждения |
не происходит. В случае |
Ia 0 Ua |
Ea cE n и характеристика полностью повторяет кривую |
|
намагничивания f F0 , где F0 Fш iв . |
На практике пользуются |
|
нисходящей гистерезисной кривой (если требуется знание величины Uост )
или усредненной кривой намагничивания, проходящей через нулевую координату (кривая 0 на рис. 1.34, а и б).
|
а) |
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
||
|
|
Ua |
|
|
|
|
|
|
|
0 |
|
Ua |
6 |
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
0,5 |
||||||||
|
|
|
|
|
|
|
|
|
|
1, 2 |
|
|
4 |
|||||
|
|
|
|
C |
|
|
|
B |
|
|
1, 2 |
|||||||
|
Uн |
|
|
|
|
|
|
|
|
|
Uн |
|
|
3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
AB Ia Ra |
|
|
|
|
|||
|
|
|
|
в |
в |
|
|
|
|
|
|
|||||||
|
|
|
|
BC Faq |
|
|
|
|
||||||||||
|
|
|
i |
|
i |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
iв |
|
|
|
iв |
|
|
i |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iвн(6) iв0 iвн(4) iвн(1,2) iвн(3) |
|
|
|
0 |
|
i |
|
i |
0 |
|
|
||||||||||
|
|
|
в0 |
|
|
вн |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Рис. 1.34. Опытные характеристики ГПТ |
|
|
||||||||||
|
Из опыта холостого хода можно определить коэффициент насыще- |
|||||||||||||||||
ния магнитной цепи k , ток возбуждения холостого хода iв0 , |
при котором |
|||||||||||||||||
Ua |
E0н Uн , остаточное напряжение Uост (по гистерезисной кривой). |
|||||||||||||||||
|
Характеристика короткого замыкания (зависимость Ia |
f iв при |
||||||||||||||||
Rнг |
0 , т. е. при |
Ua |
0 ) |
|
в МПТ не представляет интереса, если щетки |
|||||||||||||
установлены так, что Fad 0. Поэтому на рис. 1.34 она не приведена.
С точки зрения физических особенностей работы МПТ наибольший интерес представляет нагрузочная характеристика (зависимость Ua f iв при Ia Iн const ), которая для независимого и параллельно-
го возбуждения пройдет правее и ниже характеристики холостого хода (кривая 1, 2 на рис. 1.34, а и б). При этом для достижения Ua Uн потре-
48

буется iвн iв0 . Разница iв iвн iв0 расходуется на компенсацию падения напряжения в цепи якоря Ia Ra в (1.17) и на компенсацию размагничивающего действия поперечной реакции якоря Faq Ia в (1.19).
Если из точки A провести вертикальный отрезок AB Ia Ra , а из
точки B провести горизонтальный отрезок BC до пересечения с характеристикой холостого хода в точке C , то мы получим так называемый характеристический треугольник ABC , который позволяет представить
указанную выше |
величину iв |
в виде суммы |
двух составляющих: |
||
|
|
. Первая |
|
очевидно покажет, |
|
iв iвн iв0 iв |
iв |
составляющая iв |
|
||
сколько тока возбуждения понадобится дополнительно к iв0 для компенса-
ции падения напряжения в якорной цепи, а вторая составляющая i по-
в
кажет, сколько тока возбуждения понадобится дополнительно к iв0 для компенсации размагничивающего действия поперечной реакции якоря, чтобы получить то же самое номинальное напряжение Uн на выходе ГПТ, но уже не в режиме холостого хода, а под нагрузкой. Следовательно, величина отрезка BC в масштабе тока возбуждения будет равна BC Faq .
Вид нагрузочной характеристики при смешанном возбуждении зависит от силы и направления включения последовательной обмотки. Если сериесную обмотку включить встречно к шунтовой, то с ростом тока нагрузки она будет создавать дополнительное размагничивание (– Fc Ia в
(1.19)) и нагрузочная характеристика сместится еще больше вправо и вниз (кривая 3 на рис. 1.34, б). При согласном включении сериесной и шунтовой обмоток с ростом тока нагрузки будет создаваться дополнительное подмагничивание (+ Fc Ia в (1.19)), и нагрузочная характеристика станет
сближаться с характеристикой холостого хода (кривая 4 на рис. 1.34, б). В случае очень сильной последовательной обмотки может оказаться, что
iвн iв0 ( iв 0 – кривая 6 на рис. 1.34, б).
Зная характеристику холостого хода и параметры характеристического треугольника, можно, не проводя испытаний ГПТ под нагрузкой, построить его внешние и регулировочные характеристики и определить U%
(см. [1, 5]).
49
1.3. Работа машины постоянного тока в режиме двигателя
Классификация ДПТ по способу возбуждения. Анализ работы ДПТ обычно проводят при условии, что он питается от сети большой мощности и при изменении нагрузки на валу сетевое напряжение остается
неизменным (Uс const ). Шунтовая цепь |
возбуждения (Ш1–Ш2 |
на |
рис. 1.12) ДПТ обычно подключается, как |
и цепь якоря (Я1–Я2 |
на |
рис. 1.12), к сетевому напряжению Uс const , и деление на независимое и
параллельное возбуждение в этом случае теряет смысл. Поэтому принято различать ДПТ параллельного (шунтового) возбуждения и ДПТ последовательного (сериесного) возбуждения, а ДПТ смешанного возбуждения рассматривать как промежуточный вариант в зависимости от соотношения НС шунтовой и сериесной обмоток. ДПТ с магнитоэлектрическим возбуждением в этом случае будет обладать всеми свойствами шунтового ДПТ, исключая возможность регулирования магнитного потока (т. е. исключая режим ослабленного поля).
Характеристики ДПТ обычно делят на зависящие от времени (пус-
ковые, регулировочные, тормозные), именуемые динамическими, и на не зависящие от времени (механические при переменной нагрузке на валу или нагрузочные при постоянной нагрузке на валу), именуемые статическими. Если пренебречь переходными процессами в электрической и магнитной цепи ДПТ, то анализ его работы при пуске, регулировании частоты вращения и торможении можно выполнить и на основании статических механических характеристик.
Механические характеристики ДПТ – это зависимости n f M
или f M , где 2 n, при Uс const и других неизменных параметрах регулирования. В более широком смысле под механическими характеристиками иногда понимают зависимости n, , Ia f M при тех же
условиях. Наиболее полно свойства ДПТ при изменении нагрузки описы- |
||||
ваются рабочими характеристиками n, , I |
a |
, P , M f P |
, в состав кото- |
|
|
1 |
2 |
|
|
рых косвенным образом входит и механическая характеристика ДПТ. Близким аналогом механической характеристики является также широко используемая в теории электропривода скоростная или электромеханиче-
ская характеристика n f (Ia ) или f Ia , поскольку ток якоря ДПТ Ia и момент на валу M связаны общим процессом преобразования электрической энергии в механическую (электромагнитная мощность ДПТ Pэм Ea Ia Mэм – см. принцип действия, – и электромагнитный момент ДПТ Mэм cM Ia – см. (1.20)). Нагрузочные характеристики, описыва-
50