

Электрические машины. Давидчук, Лебедев. Конспект лекций
.pdfа) |
|
б) |
|
|
|
|
U |
|
|
n |
|
|
|
|
|
Mc Mн |
|
|
|
|
П1 |
|
nн |
|
|
|
|
|
2 |
|
|
|
||
|
С1 |
|
|
|
|
|
|
С2 |
|
|
|
|
|
Я1 Я 2 |
|
|
1 |
|
M |
|
|
|
|
Mн |
|
|
|
ПM |
Mc Mн |
|
M |
П |
Ia |
|
|
|
|
||||
|
|
|
|
|
||
|
|
|
Iaн |
IП |
|
|
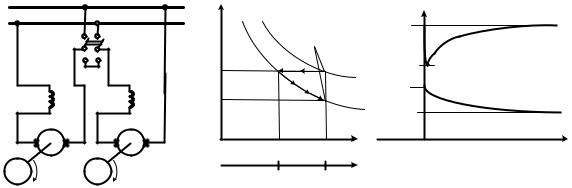
Рис. 1.40. Схема (а) и механическая характеристика (б) прямого пуска сериесного ДПТ с номинальной нагрузкой на валу
Можно также отметить два важных общих для шунтового и сериесного ДПТ пусковых свойства:
1)величина пускового тока не зависит от величины нагрузки на валу в момент пуска ( IП U / Ra );
2)длительность пуска при заданной кратности пускового тока ki
IП / Iaн , наоборот, будет определяться величиной статического
момента на валу (чем больше статический момент, тем меньше динамический момент и тем медленнее будет разгоняться якорь ДПТ).
Реостатный пуск ДПТ параллельного возбуждения с помощью ручного пускового реостата (ПР) представлен на рис. 1.41. Входные зажимы ПР «Л1–Л2» (рис. 1.41, а) подключаются к сети постоянного тока, с выходных зажимов собирается схема двигателя: с зажима «Я» – якорная цепь, с зажима «Ш» – шунтовая цепь возбуждения, обе цепи замыкаются на зажим «Л2». Исходное положение поворотной ручки ПР – «0» (часто обозначается словом «стоп»), когда цепь якоря и цепь возбуждения питания не получают.
При переводе поворотной ручки ПР из положения «0» в положение «1» запитывается через скользящий контакт цепь возбуждения и через прерывистый контакт – цепь якоря. В цепи возбуждения устанавливается
неизменный в дальнейшем ток возбуждения iв U / Rв const , |
а в цепи |
||
якоря происходит бросок тока до уровня IП max U /(Ra RП1 |
RП2 RП3 ) |
||
и соответственно бросок электромагнитного |
момента |
до |
уровня |
M1 cM IП max , возникает динамический момент |
Mдин = M1 M0 0, и |
||
якорь ДПТ приходит во вращение. |
|
|
|
В момент времени t2 (точка 2 на рис. 1.41, б и в) ток в якоре достиг- |
|||
нет уровня IП min (U Ea2 ) /(Ra RП1 RП2 RП3 ) , где Ea2 |
cM n2 , и |
||
61
ручку ПР следует перевести в положение «2», исключив тем самым из якорной цепи сопротивление RП1 . Снова произойдет бросок тока якоря до
уровня IП max (U Ea2 ) /(Ra RП2 RП3 ) . Аналогичные процессы будут происходить и в точках 3 и 4.
При переводе ручки ПР в положение «4» (часто обозначается словом «ход») пусковые сопротивления будут исключены из якорной цепи, и ДПТ после разгона по естественной механической характеристике при выравнивании электромагнитного и статического моментов на валу ( M4 Mc
M0 – точка 4″ на рис. 1.41, б) достигнет установившейся частоты вращения n0 .
а)
U |
|
|
|
|
Л1 RП1 |
2 RП 2 Л 2 |
|
ПР |
1 |
|
3R |
|
|
П 3 |
|
|
|
|
|
|
0 |
|
4 |
|
Ш |
Я |
Л 2 |
|
|
Я1 |
Я 2 |
|
|
|
Ш1 |
|
|
|
Ш2 |
|
|
|
в) |
б) |
|
|
|
|
|
|
|
n0 |
n |
Mc |
M0 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
RП 0 |
|
|
|
|
|
|
|
|
||
n4 |
RП 3 |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
||
n3 |
|
|
|
|
4 |
3 |
|
|
|
|
|
3 |
|
||
n |
|
RП 2 RП 3 |
|
||||
|
|
|
|
||||
2 |
|
|
|
|
|
2 |
|
|
R |
R |
R |
2 |
1 |
M |
|
|
|
П1 |
П 2 |
П 3 |
|||
|
|
|
|
|
|
||
|
M0 |
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
Ia0 |
|
|
|
IП min |
IП max |
|
|
n, Ia |
|
|
|
|
|
|
IП max |
1 |
2 |
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
IП min |
2 |
3 |
4 |
n |
||
n0 |
|
|
||||
|
|
|
n3 |
n4 |
|
|
|
|
n2 |
|
Ia |
||
Ia0 |
|
|
|
|
||
|
|
|
4 |
|||
|
|
|
|
|
|
t |
t1 |
t2 |
t3 |
t4 |
|
||
|
|
|||||
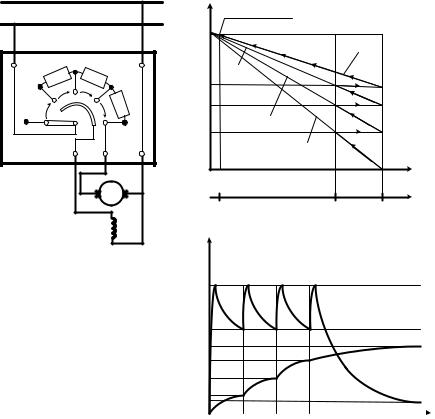
Рис. 1.41. Схема (а), механическая характеристика (б)
и переходный процесс (в) реостатного пуска шунтового ДПТ без нагрузки на валу
62
Расчет пусковых сопротивлений RП1 , RП 2 , RП3 при заданных значениях IП max и IП min может быть выполнен по соотношениям для этих токов в точках 1, 2, 2′, 3, 3′, 4, 4′. На практике при ручном пуске сложно бывает определить моменты времени t1, t2 , t3 , t4 . Быстрый поворот ручки ПР при-
водит к превышению со второй ступени максимально допустимых пусковых токов, медленный поворот – к снижению со второй ступени максимальных пусковых токов и перегреву пусковых сопротивлений.
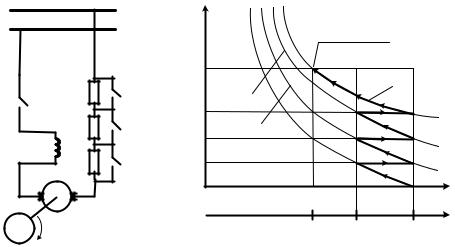
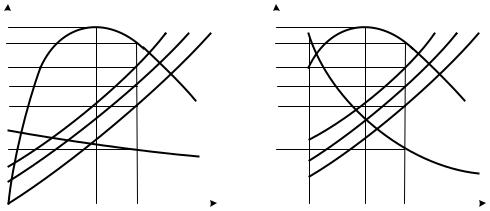
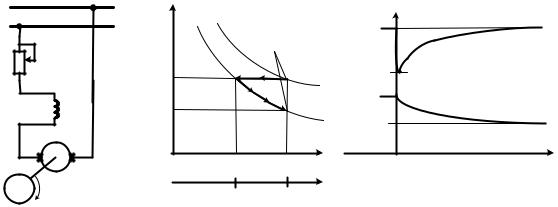
В системах автоматизированного реостатно-контакторного управления ДПТ может применяться автоматический реостатный пуск, где моменты выключения пусковых реостатов могут осуществляться в зависимости от времени пуска, от величины тока в якоре, от частоты вращения, от величины ЭДС в якоре и т. д. На рис. 1.42 представлен автоматизированный реостатно-контакторный пуск ДПТ с последовательным возбуждением при номинальном статическом моменте на валу. Управление шунтирующими контактами КМ2, КМ3, КМ4 пусковых контакторов может осуществляться с заданной временной задержкой с помощью реле времени. В остальном процесс пуска аналогичен процессам на рис. 1.41 (включая переходный процесс на рис. 1.41, в).
а) |
|
|
|
б) |
|
|
|
|
|
|
|
U |
|
|
|
|
n |
|
|
Mc Mн |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
nн |
|
|
|
4 |
|
0 |
|
|
|
|
|
|
|
|
|
RП |
|
||
|
|
RП1 |
КМ 2 |
n4 |
|
|
|
|
|
||
КМ1 |
|
R |
|
|
|
4 |
|
||||
|
|
|
|
|
|
П 3 |
|
|
|
|
|
|
|
RП 2 |
КМ 3 |
n |
|
|
|
|
|
|
|
|
С1 |
RП 2 RП 3 |
|
4 |
3 |
|
|||||
|
|
|
3 |
|
3 |
|
|||||
|
|
R |
КМ 4 |
n2 |
R |
R |
R |
|
|
|
|
|
|
П 3 |
|
П1 |
П 2 |
П 3 |
|
2 |
2 |
|
|
|
С2 |
|
|
|
|
|
|
|
M |
||
Я1 |
|
Я 2 |
|
|
|
|
|
|
|
1 |
|
|
|
0 |
|
|
Mн |
|
|
|
|||
|
|
|
|
|
|
|
|
I a |
|||
|
Mc Mн |
|
|
|
|
|
|
|
|
||
ПM |
|
|
|
|
Iaн |
IП min |
IПmax |
|
|||
Рис. 1.42. Схема (а) и механическая характеристика (б) автоматизированного |
|||||||||||
реостатного пуска сериесного ДПТ с номинальной нагрузкой на валу |
|
||||||||||
Следует заметить, что при реостатном пуске нерегулируемых ДПТ пусковые сопротивления рассчитаны по экономическим соображениям только на короткое время пуска и не предназначены для длительной работы под нагрузкой, поэтому ручку пускового реостата нужно поворачивать всегда до самого конца (положение «ход»). В регулируемых ДПТ для пус-
63
ка используются регулировочные реостаты, рассчитанные на длительную работу под нагрузкой.
Пуск регулируемым напряжением является более экономичным по сравнению с реостатным. Осуществить такой способ пуска при питании от сети постоянного тока невозможно, поэтому необходимо иметь автономный источник регулируемого напряжения. Таким источником может быть, например, генератор постоянного тока.
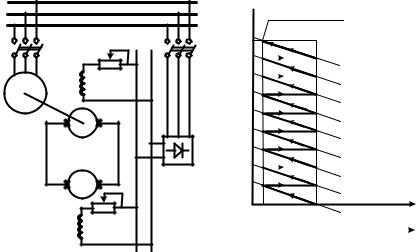
На рис. 1.43 представлен пуск регулируемым напряжением ДПТ независимого возбуждения (Д) без нагрузки на валу при питании от ГПТ независимого возбуждения (Г), приводимого во вращение приводным механизмом, в данном случае – асинхронным двигателем переменного тока (АД). Применение в генераторе и двигателе параллельного возбуждения здесь нецелесообразно, так как напряжение на якорях этих машин будет изменяться. Независимые цепи возбуждения на рис. 1.43, а получают питание через выпрямитель от сети переменного тока.
а)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RвГ |
|
|
|
П1 |
|
|
П2 |
||
|
|
|
|
||
|
|
|
|
|
|
|
АД |
|
|
|
|
|
|
|
|
|
|
|
|
ГПТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Я1 |
Я 2 |
|
|
|
|
ДПТ |
|
|
|
|
|
Ш1 |
RвД |
|
|
|
|
|
|
|
|
|
|
Ш2 |
|
|
|
б)
 n Mc M0
n Mc M0
n0 2
|
|
|
|
|
|
|
Ua Uн |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
U1 |
Uн |
|
|
|
|
|
|
|
|
|
U2 |
U1 |
|
|
|
|
|
|
|
|
|
U3 |
U2 |
|
|
|
|
|
|
|
|
|
U4 |
U3 |
|
|
|
|
|
|
|
|
|
U5 |
U4 |
|
|
|
|
|
|
|
|
|
U6 |
U5 |
|
|
|
|
|
|
1 |
U7 |
U6 |
|
M |
||
|
|
M0 |
|
|
U7 |
|
|
|||
|
|
Mн U8 |
|
Ia |
||||||
I |
a0 |
Iaн |
|
|
|
|||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.43. Схема (а) и механическая характеристика (б) пуска регулируемым напряжением ДПТ независимого возбуждения, работающего в системе «Г – Д»
Перед включением рубильника П2 сопротивление в цепи возбуждения генератора RвГ устанавливают на максимум, обеспечивая тем самым начало пуска при минимально возможном напряжении на двигателе, а сопротивление в цепи возбуждения двигателя RвД устанавливают на мини-
мум, обеспечивая тем самым максимальный ток возбуждения при пуске, максимальный поток под полюсами, максимальный пусковой момент MП cM IП и наименьшую частоту вращения после разгона двигателя.
После включения рубильников П2 и П1 плавно уменьшают RвГ , увеличи-
64
вая тем самым напряжение на выходе генератора и одновременно на входе двигателя. Описанный способ пуска и регулирования ДПТ называется системой «Г – Д».
В зависимости от шага и темпа (т. е. скорости изменения во времени) регулирования напряжения можно добиться, чтобы пусковой ток не выходил за рамки номинального значения (рис. 1.43, б). Увеличение шага или темпа регулирования приводит к увеличению пусковых токов. Система «Г – Д» требует применения трех машин (АД, ГПТ и ДПТ на рис. 1.43, а), что достаточно дорого, громоздко и не очень экономично изза троекратного преобразования энергии (общий КПД такой системы
0,7 ).
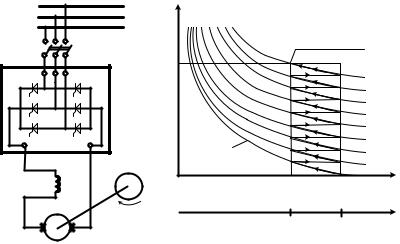
Более экономичный, но аналогичный системе «Г – Д» по сути происходящих процессов получается пуск ДПТ при питании его от тиристорного преобразователя.
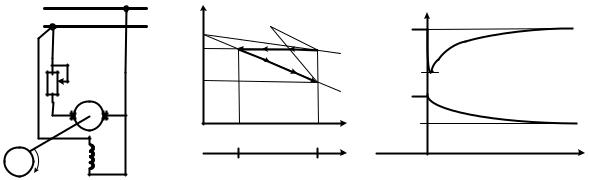
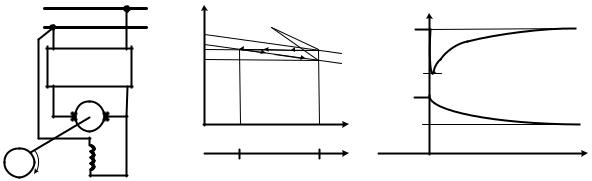
На рис. 1.44 представлен пуск ДПТ последовательного возбуждения с номинальной нагрузкой на валу при питании от управляемого выпрямителя (УВ), выполненного на тиристорах. Как видно из рис. 1.44, б, процесс пуска ДПТ при питании от УВ аналогичен пуску ДПТ по системе «Г – Д», однако габариты всей установки в этом случае будут существенно меньше, а КПД всей системы – несколько больше.
а) |
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
УВ |
|
П1 |
nн |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С1 |
|
|
|
|
|
ПM |
|
|
С2 |
Mc Mн |
Я1 |
|
Я 2 |
|
|
n |
|
|
|
|
Mc Mн |
|
|
|
|
2 |
|
Ua |
Uн |
|
|
|
||
|
|
|
U |
U |
|
|
|
U12 |
U1н |
|
|
|
U3 |
U2 |
|
|
|
U4 |
U3 |
|
|
|
U5 |
U4 |
|
U8 U7 |
|
U6 |
U5 |
|
1 |
U7 |
U6 |
|
|
|
|||
0 |
|
|
M |
|
Mн |
M |
|
||
|
|
|
||
|
|
П |
|
|
|
Iaн |
I |
|
I a |
|
|
|
||
|
|
П |
|
|
Рис. 1.44. Схема (а) и механическая характеристика (б) пуска регулируемым напряжением сериесного ДПТ от управляемого выпрямителя (УВ), выполненного на тиристорах
Рабочие характеристики ДПТ. Рабочие характеристики ДПТ параллельного и последовательного возбуждения представлены на рис. 1.45. Рабочие характеристики позволяют определить номинальные параметры
двигателя ( P |
, P |
, I |
aн |
, M |
н |
, n |
, ), которые обычно указываются на щитке |
2н |
1н |
|
|
н |
н |
65
(или в паспорте) машины, максимальный КПД max и соответствующую ему мощность P2 max , а также для шунтового ДПТ – параметры холостого
хода ( P , |
I |
a 0 |
, n ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
n, , I |
, P , M |
|
|
|
|
|
|
|
|
n, , I |
, P , M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
1 |
|
|
|
|
|||
|
|
|
a |
1 |
|
P |
I |
|
|
|
|
|
|
P |
I |
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
M |
||||||
m |
|
|
|
|
|
1 |
|
a |
|
m |
|
1 |
|
a |
|
|||
P н |
|
|
|
|
|
|
|
|
|
|
P |
н |
|
|
|
|
|
|
1н |
|
|
|
|
|
|
|
1н |
|
|
|
|
|
|
||||
Iaн |
|
|
|
|
|
|
Iaн |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Mн |
|
|
|
|
|
|
|
|
|
|
Mн |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n0н |
|
|
|
|
|
|
n |
|
|
nн |
|
|
|
|
n |
|||
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ia100 |
|
|
|
|
|
|
|
|
P2 |
|
|
|
|
|
|
P2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
P |
P |
|
|
|
|
|
|
0 0, 25P2н P |
|
|
|
|
|||
|
|
|
|
2 max |
2н |
|
|
|
|
|
|
|
|
2 max |
|
|
|
|
Рис. 1.45. Рабочие характеритики ДПТ параллельного (а) и последовательного (б) возбуждения
Регулирование частоты вращения ДПТ. Регулирование частоты
вращения ДПТ при |
постоянном статическом |
моменте на валу ( |
Mc Mв M0 const ) |
согласно (1.25) и (1.27) можно производить по- |
|
средством введения добавочного сопротивления Rд |
в цепь якоря, посред- |
|
ством снижения подводимого напряжения Ua или посредством изменения магнитного потока . В шунтовом ДПТ из-за большого внутреннего сопротивления обмотки возбуждения обычно применяется только ослабление поля (снижение iв ), а в сериесном ДПТ шунтируют как обмотку воз-
буждения (ослабление поля), так и обмотку якоря (усиление поля).
На рис. 1.46 представлены схема, механическая характеристика и пе-
реходный процесс при регулировании частоты вращения шунтового ДПТ путем введения добавочного сопротивления в цепь якоря при условии
Mc Mн const . |
В точке 1 на рис. 1.46, б Rд 0 , ток якоря согласно |
||
(1.17) |
и (1.18) |
Ia1 (U Ea1 ) / Ra (U cE n1 ) / Ra , |
M1 cM Ia1 |
Mc |
Mн , динамический момент Mдин1 M1 Mс 0 |
и n1 nн const . |
|
В первый момент после введения Rд в цепь якоря (точка 2) частота враще-
ния из-за свойства инерции (якорь обладает определенной массой) измениться не может, т. е. n2 n1 nн . Тогда Ia2 (U cE n2 ) /(Ra Rд ) Ia1,
66
M2 cM Ia2 M1 |
Mc и Mдин2 |
M2 |
Mс |
0 , под действием которого |
|||||||||||||
частота вращения |
начнет |
уменьшаться. |
|
В |
точке 3 |
n3 n1 nн , |
но |
||||||||||
M3 cM Ia3 M1 cM Ia1 Mc , |
следовательно, Ia3 (U cE n3 ) / |
||||||||||||||||
/(Ra Rд ) Ia1 (U cE n1 ) / Ra |
и |
|
Mдин3 M3 Mс |
0 , |
т. е. ДПТ |
||||||||||||
начнет работать с постоянной частотой вращения n3 const . Описанный |
|||||||||||||||||
процесс показан на рис. 1.46, в. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
а) |
|
б) |
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
U |
|
n |
Mc Mн |
|
|
|
|
|
|
n, Ia |
I |
a3 |
I |
н |
|||
|
nн |
1 |
Rд 0 |
Iн |
|
|
|
||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Rд |
|
|
|
|
|
|
|
|
Ia 2 |
|
|
|
|
|
||
|
n |
|
|
|
3 R 0 |
|
|
|
|
|
|||||||
|
|
3 |
|
|
|
|
|
|
д |
|
|
nн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n3 nн |
|||
Я1 |
Я 2 |
|
|
|
|
|
|
|
M |
|
n3 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Ш1 |
|
M2 |
|
Mн |
I |
a |
|
|
|
|
|
|
t |
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||
ПM Mc Mн Ш2 |
|
I |
a 2 |
|
I |
н |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Рис. 1.46. Схема (а), механическая характеристика (б) |
|
|
|
|
||||||||||||
|
и переходный процесс (в) при регулировании частоты вращения |
|
|
|
|
||||||||||||
шунтового ДПТ путем введения добавочного сопротивления в цепь якоря |
|
|
|
||||||||||||||
На рис. 1.47 представлены схема, механическая характеристика и пе-
реходный процесс при регулировании частоты вращения сериесного ДПТ путем введения добавочного сопротивления в цепь якоря при условии
Mc |
Mн const . В точке 1 на |
|
рис. 1.47, б Rд 0 , |
ток якоря согласно |
||||||||||||||||||||||||||||||||||
(1.17) и (1.18), с учетом, что в сериесном ДПТ k Ia , |
Ia1 |
U /(cE k n1 |
||||||||||||||||||||||||||||||||||||
R ) |
, |
M |
1 |
c k |
|
I 2 M |
c |
M |
н |
, |
|
динамический момент |
M |
дин1 |
M |
1 |
|
|||||||||||||||||||||
|
|
a |
|
|
|
|
M |
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Mс |
0 и |
n1 nн |
|
const . В первый момент после введения |
Rд |
|
в цепь |
|||||||||||||||||||||||||||||||
якоря (точка 2) частота вращения из-за свойства инерции якоря |
изменить- |
|||||||||||||||||||||||||||||||||||||
ся не может, т. е. |
n2 n1 |
nн . |
|
|
Тогда |
Ia2 U /(cE k n2 Ra Rд ) Ia1 , |
||||||||||||||||||||||||||||||||
M |
2 |
c k |
|
I 2 |
M |
1 |
M |
c |
и |
M |
дин2 |
M |
2 |
M |
с |
0 , под действием которого |
||||||||||||||||||||||
|
|
M |
|
|
a2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
частота |
вращения |
|
начнет |
уменьшаться. |
|
В точке |
3 |
|
n3 n1 nн , |
|
но |
|||||||||||||||||||||||||||
M |
3 |
c |
k |
|
I 2 |
M |
1 |
|
c k |
|
I |
2 M |
c |
, |
следовательно, |
I |
a3 |
U /(c k |
n |
|||||||||||||||||||
|
|
M |
|
|
a3 |
|
|
|
M |
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
3 |
|
||||||||||
Ra Rд ) Ia1 U /(cE k n1 Ra ) |
|
и |
|
Mдин3 M3 Mс |
0, |
т. е. |
ДПТ |
|||||||||||||||||||||||||||||||
начнет работать с постоянной частотой вращения n3 const . Описанный процесс представлен на рис. 1.47, в.
67
а) |
|
|
|
|
б) |
|
|
|
|
|
|
в) |
|
|
|
|
U |
|
|
|
|
n |
|
|
|
|
|
|
n, Ia |
Ia3 Iн |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Mc |
Mн |
Iн |
|
|
||||
|
|
Rд |
|
|
|
|
|
|
|
|
|||||
|
|
|
n |
|
|
|
1 Rд 0 |
I |
|
|
|
||||
|
|
|
|
|
|
|
|
a 2 |
|
|
|||||
|
|
|
|
|
н |
2 |
|
|
|
|
|
|
|
||
|
|
|
С1 |
n3 |
|
|
3 R 0 |
nн |
n |
n |
|||||
|
|
|
|
|
|
|
|
n3 |
|||||||
|
|
|
С2 |
|
|
|
|
|
|
д |
3 |
н |
|||
|
|
|
|
|
|
|
|
|
|
|
t |
||||
|
Я1 |
|
|
Я 2 |
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
M |
|
M |
|
Ia |
|
0 |
|
|
|
|
|
|
|
|
|
2 |
н |
|
|
|
|
||||
ПM |
M |
c |
M |
н |
Ia 2 |
Iн |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Рис. 1.47. Схема (а), механическая характеристика (б) и переходный процесс (в) |
|
|||||||||||||
|
|
при регулировании частоты вращения сериесного ДПТ путем введения |
|
|
|||||||||||
|
|
|
|
|
добавочного сопротивления в цепь якоря |
|
|
||||||||
В процессе регулирования шунтового и сериесного ДПТ путем введения добавочного сопротивления в цепь якоря подводимая мощность
P UI |
a |
практически не изменилась (так как U U |
н |
), а полезная мощ- |
1 |
|
|
ность P2 Mn уменьшилась ( n3 nн ), следовательно, КПД двигателя стал ниже (из-за потерь энергии на Rд ). Тепловыделение в якорной обмотке не изменилось ( Ia3 Ia1 ), а теплоотвод при условии самовентиляции уменьшился ( n3 nн ), следовательно, тепловое состояние ДПТ стало хуже. Реактивная ЭДС в коммутирующих секциях согласно (1.12) er Aava Ia n и, так как n3 nн , er стала меньше, а коммутационные условия на коллекто-
ре стали лучше. Таким образом, реостатное регулирование ДПТ позволяет регулировать частоту вращения в диапазоне ниже номинальной, является недостаточно экономичным, может оказаться опасным для двигателя в тепловом отношении при самовентиляции, но проблем с коммутацией в этом режиме, как правило, не возникает.
На рис. 1.48 представлены схема, механическая характеристика и пе-
реходный процесс при регулировании частоты вращения шунтового ДПТ путем снижения питающего напряжения при условии Mc Mн const .
В точке 1 на рис. 1.48, б U1 Uн , ток якоря Ia1 (Uн cE n1 ) / Ra , M1 |
|
cM Ia1 Mc Mн , динамический момент Mдин1 M1 Mс 0 |
и |
n1 nн const . В первый момент после снижения подводимого к якорю ДПТ напряжения до уровня U Uн (точка 2) частота вращения из-за
инерции якоря измениться |
не может, т. е. |
n2 n1 |
nн . |
Тогда Ia 2 |
(U cE n2 ) / Ra Ia1 , |
M2 cM Ia2 M1 |
Mc |
и |
Mдин2 M 2 |
68
Mс 0 , под действием которого частота вращения начнет уменьшаться.
Вточке 3 n3 n1 nн , но M3 cM Ia3 M1 cM Ia1 Mc , следова-
тельно, Ia3 (U cE n3 ) / Ra Ia1 (Uн cE n1 ) / Ra и |
Mдин3 M3 |
|
|||||||||||||
Mс 0, |
т. е. ДПТ |
начнет работать с постоянной частотой |
вращения |
||||||||||||
n3 const . Описанный процесс представлен на рис. 1.48, в. |
|
|
|
|
|
|
|||||||||
а) |
|
б) |
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
n, Ia |
|
I |
|
I |
|
|
U |
|
|
Mc Mн |
|
|
|
|
|
a3 |
н |
|
||||
|
nн |
1 U Uн |
Iн |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
U var |
n |
2 |
|
3 U U |
н |
Ia 2 |
|
|
|
|
|
|
|||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
||
Я1 |
Я 2 |
|
|
|
|
M |
|
nн |
|
|
n3 nн |
||||
|
|
|
|
|
|
|
n |
|
|
||||||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
Ш1 |
|
M2 |
Mн I |
a |
|
|
|
|
|
|
|
t |
||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПM Mc Mн Ш2 |
|
I |
a 2 |
I |
н |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 1.48. Схема (а), механическая характеристика (б) и переходный процесс (в) |
|
|
|
||||||||||||
|
при регулировании частоты вращения шунтового ДПТ путем снижения |
|
|
|
|
|
|||||||||
|
|
|
питающего напряжения |
|
|
|
|
|
|
|
|
||||
На рис. 1.49 представлены схема, механическая характеристика и пе-
реходный процесс при регулировании частоты вращения сериесного ДПТ путем снижения питающего напряжения при условии Mc Mн const .
Уменьшение напряжения в данном случае достигается при переключении рубильника П1 из положения I, когда оба двигателя работают параллельно от сети, в положение II, когда на сеть включаются два двигателя, соединенные последовательно друг с другом. В точке 1 на рис. 1.49, б U1 Uн ,
ток якоря Ia1 Uн /(cE k n1 Ra ) , M1 cM k Ia21 Mc Mн , динамический момент Mдин1 M1 Mс 0 и n1 nн const . В первый момент после снижения подводимого напряжения до уровня U Uн (точка 2) частота
вращения из-за свойства |
инерции |
якоря |
|
измениться не |
может, т. е. |
||||||||||||
n2 n1 nн . Тогда Ia2 |
U /(cE k n2 |
Ra ) Ia1 , M2 |
cM k Ia22 M1 Mc |
||||||||||||||
и Mдин2 M2 Mс 0 , |
под действием которого частота вращения начнет |
||||||||||||||||
уменьшаться. В точке 3 |
n n n |
, но |
M |
3 |
c |
k |
|
I 2 |
M |
1 |
c |
k |
|
I 2 |
|
||
|
|
3 |
1 н |
|
|
M |
|
a3 |
|
M |
|
a1 |
|
||||
Mc , следовательно, |
|
Ia3 |
U /(cE k n3 |
Ra ) Ia1 Uн /(cE k n1 Ra ) |
и |
||||||||||||
Mдин3 M3 Mс 0 , |
т. е. |
ДПТ начнет работать с постоянной частотой |
|||||||||||||||
вращения n3 const . Описанный процесс представлен на рис. 1.49, в.
69
а) |
|
|
|
|
б) |
|
|
|
|
в) |
|
|
|
U |
|
|
|
|
n |
|
|
|
|
n, Ia |
Ia3 Iн |
|
I |
|
|
|
|
Mc |
Mн |
Iн |
|
|||
|
|
|
П1 |
|
|
|
|
|||||
|
|
|
|
nн |
2 |
|
1 |
|
U Uн |
Ia 2 |
|
|
|
|
II |
|
|
|
|
|
|||||
|
|
С1 |
|
С1 |
|
|
|
|
|
|||
|
|
|
n |
|
|
U 0,5Uн |
nн |
n3 nн |
||||
|
|
|
|
|
|
|
n |
|||||
|
|
С2 |
|
С2 |
3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
t |
|||
|
Я1 |
Я 2 |
Я1 |
Я 2 |
|
M |
|
M |
|
M |
|
|
|
|
|
|
|
|
|
|
Ia |
0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
н |
|
|
|
ПM |
Mc Mн ПM |
Mc Mн |
|
Ia 2 |
Iн |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||
Рис. 1.49. Схема (а), механическая характеристика (б) и переходный процесс (в) при регулировании частоты вращения сериесного ДПТ путем снижения питающего напряжения
В процессе регулирования шунтового и сериесного ДПТ путем снижения подводимого к якорю напряжения уменьшились и подводимая
мощность |
P UI |
a |
(так как U U |
н |
), и полезная мощность |
P Mn |
(так |
|
|
1 |
|
|
|
2 |
|
||
как n3 nн ), |
следовательно, КПД |
двигателя изменился незначительно. |
||||||
Тепловыделение в якорной обмотке не изменилось ( Ia3 Ia1 ), а теплоотвод при условии самовентиляции уменьшился ( n3 nн ), следовательно, тепловое состояние ДПТ стало хуже. Реактивная ЭДС в коммутирующих секциях er Aava Ia n стала меньше (так как n3 nн ), и коммутационные
условия на коллекторе стали лучше. Таким образом, регулирование ДПТ путем снижения подводимого напряжения позволяет регулировать частоту вращения в диапазоне ниже номинальной, является достаточно экономичным при условии наличия автономного источника регулируемого напряжения, может оказаться опасным для двигателя в тепловом отношении при самовентиляции, но не будет иметь коммутационных проблем.
На рис. 1.50 представлены схема, механическая характеристика и пе-
реходный процесс при регулировании частоты вращения шунтового ДПТ
путем ослабления магнитного поля при условии |
Mc 0,5Mн const . |
|
В точке 1 на рис. 1.50, б iв |
iвн и соответственно |
н , ток якоря |
Ia1 (U cE нn1 ) / Ra , M1 |
cM н Ia1 Mc 0,5Mн , динамический мо- |
|
мент Mдин1 M1 Mс 0 и |
n1 const . В первый момент после ослабле- |
|
|
iвн |
(точка 2) частота вращения из-за инерции якоря |
||
ния поля до уровня iв |
||||
измениться не может, т. е. n2 n1 . Тогда |
|
Ia1, и, |
||
Ia2 (U cE n2 ) / Ra |
||||
поскольку из-за малого значения Ra небольшое снижение вызывает всегда относительно более значительный прирост тока Ia , M2
70