

Электрические машины. Давидчук, Лебедев. Конспект лекций
.pdfвыше, являясь существенным недостатком, ограничивает возможность широкого использования асинхронных генераторов.
Уравнения намагничивающих сил и ЭДС, схемы замещения асинхронной машины. Уравнения НС и ЭДС приведенной АМ (роторная обмотка приводится к статорной аналогично приведению вторичной обмотки трансформатора к первичной [6] ) имеют вид
I1U1E2'
I I
2
E1 |
I1 z1 |
|
, |
(3.17) |
|||
|
|
|
|
|
|
|
|
|
|
' |
' |
' ' |
(1 s) / s |
|
|
E1 |
I2 z |
2 |
I |
2 r2 |
|
||
где I - намагничивающий ток. В АМ из – за наличия воздушного зазора
I ( 40 60 )%I1H при U1H , а не |
( 5 10 )%I1H , как I0 |
у трансформатора. В АМ |
число фаз обмоток статора m1 |
и ротора m2 может быть разным, поэтому и |
|
коэффициент приведения по току ki отличается от ku по (3.10) и равен |
||
ki m1 w1kоб1 /( m2 w2 kоб2 ) . |
(3.18) |
|
Соответственно из-за этой особенности приведенные активное и индуктивное сопротивления приведенной роторной обмотки, в отличии от выражений (2.16) и (2.17) по [6] , определяются как r2' ku ki r2 и x2' ku ki x2 .
Системе уравнений (3.17) соответствует Т–образная схема замещения АМ, представленная на рис.3.10, а. Также как и у трансформаторов эта схема имеет четкий физический смысл, но для проведения численных исследований асинхронных машин более удобна Г– образная схема, у которой намагничивающий контур вынесен на входные зажимы схемы замещения (рис.3.10, б). Удобство Г–образной схемы замещения для практических расчетов состоит в том, что, так
как сопротивления ее намагничивающего контура z1 zm не зависят от скольжения s , то при U1 const и f1 const также Ioo const . Ток намагничи-
111
вающего |
контура Ioo |
еще называют |
током идеального холостого хода |
||||||
( s = 0 ). |
|
|
|
|
|
|
|
||
|
|
Г-образная схема замещения получается из Т-образной путем пере- |
|||||||
хода |
от |
тока вторичной обмотки I |
к новому току I по равенству |
||||||
|
|
|
|
|
|
2 |
2 |
|
|
I |
с |
I |
. Комплекс c |
1 z / z |
m |
, его модуль равен отношению U |
1 |
к ЭДС |
|
2 |
1 |
2 |
1 |
1 |
|
|
|
||
E1 |
при идеальном холостом ходе, а аргумент – углу между векторами U1 и |
||||||||
|
|
|
|
|
|
|
|
|
|
E1 . Для асинхронных машин мощностью выше киловатта модуль комплек- |
|||||||||
|
|
|
|
|
|
|
|
|
|
са |
c1 |
мало отличается от единицы и лежит в диапазоне 1.02 1.06 [1-5] . |
|||||||
|
|
|
|
|
|
|
|
|
|
Поэтому без внесения существенной погрешности, будем пользоваться не комплексом c1 , а его модулем c1 .
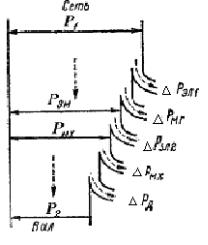
Энергетическая диаграмма асинхронного двигателя. Процесс пе-
редачи и преобразования активной мощности по Т-образной схеме замещения на рис.3.10, а происходит слева направо и отражен на энергетической диаграмме (рис.3.11). Асинхронный двигатель потребляет из сети активную мощность P1 m1U1I1 cos 1 . Часть этой мощности теряется на по-
крытие электрических потерь в обмотке статора p |
эл1 |
m I 2 r и магнитные |
||||
|
|
|
|
|
1 1 1 |
|
потери в сердечнике статора |
p |
мг |
m I 2 r |
. Оставшаяся часть представляет |
||
|
|
1 μ m |
|
|
|
|
собой электромагнитную мощность, передаваемую магнитным полем статора на ротор. На схеме замещения это мощность на полном активном сопротивлении r2 / s вторичной цепи.
Рис.3.11
Энергетическая
|
|
P |
m |
I |
2 r / s . |
(3.19) |
|||
|
|
эм |
|
1 |
2 |
2 |
|
|
|
|
|
Часть этой мощности теряется в виде |
|||||||
электрических |
потерь |
в обмотке ротора |
|||||||
p |
эл2 |
m I 2 r |
m I |
|
2 r . Сопоставляя последнее |
||||
|
2 |
2 |
2 |
|
1 |
2 |
2 |
|
|
выражение с выражением (3.19), нетрудно установить, что pэл2 sPэм ,то есть чем меньше
скольжение или выше частота вращения ротора, тем меньше потери в роторной обмотке. Остальная часть электромагнитной мощности превращается в механическую мощность Pмх ,
развиваемую на роторе:
P |
P p |
эл2 |
m I |
2 r (1 s) / s m |
I 2 r (1 s) / s . |
(3.20) |
|
мх |
эм |
1 2 |
2 |
2 |
2 2 |
|
|
Магнитные потери в стали ротора очень малы, поэтому, как правило, |
|||||||
ими пренебрегают. Часть механической мощности Pмх теряется в виде ме- |
|||||||
ханических потерь в самой машине pмх |
(на вентиляцию, |
трение в под- |
|||||
шипниках и щетках в АМ с фазным ротором) и добавочных потерь pд , обусловленных в основном высшими гармониками магнитного поля.
112

Наконец, полезная мощность на валу двигателя равна P2 Pмх - pмx pд .
Сумма |
потерь |
в |
асинхронном |
двигателе |
составляет, |
|||
p pэл1 |
pмг pэл2 |
pмх pд |
,а коэффициент полезного действия равен |
|||||
|
|
P / P |
(P p |
|
) / P |
(3.21) |
||
|
|
2 |
1 |
1 |
|
1 |
|
|
КПД трехфазных асинхронных двигателей мощностью от 1 до 1000 кВт находится в диапазоне (72 95) %.
3.2 Механические характеристики и регулирование частоты вращения асинхронной машины.
Механическая характеристика асинхронного двигателя. Экс-
плуатационные требования к ней. Электромагнитный момент АД создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Он зависит от величины электромагнитной мощности, определяемой по выражению (3.19) и угловой скорости вращения магнитного поля1 2 n1 2 f1 / p 1 / p
M P |
/ |
1 |
m |
pI 2 r |
/( |
s ) . |
|
|
|
|
(3.22) |
|
эм |
|
1 |
2 2 |
1 |
|
|
|
|
|
|
|
|
По Г–образной схеме замещения на рис.3.10, б найдем величину |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ s ) |
2 |
|
) |
2 |
. Подставив это |
приведенного вторичного тока I2 U1 / |
( r1 c1r2 |
|
( x1 c1 x2 |
|
||||||||
|
в (2.21) получим выражение для электромагнитного мо- |
||||||||||||
значение тока I 2 |
|||||||||||||
мента |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
pm U 2 r / s |
|
|
|
|
||||
|
|
|
|
|
1 |
1 |
2 |
|
|
|
. |
(3.23) |
|
|
2 f |
1 |
[( r |
c r / s )2 |
( x |
c x )2 ] |
|||||||
|
|
|
1 |
1 |
2 |
|
|
1 |
1 |
2 |
|
|
|
Анализ выражения (3.22) указывает на наличие двух точек максиму- |
|||||||||||||
ма в зависимости M f ( s ) , поскольку в точках |
s ; 0 |
и момент |
|||||||||||
M 0 . Скольжение, при котором момент имеет максимальное значение (критическое скольжение sКР ), можно определить взяв производную
dM / ds и приняв ее нулю. Решая уравнение |
|
dM / ds 0 |
относительно s |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
. Подставив значение |
sКР в выражение |
|||||||||
найдем sКР c1r2 |
/ r1 |
(x1 c1x2 ) |
|
||||||||||||
(3.23) получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pmU 2 |
|
|
|
|
|
|
|
|
M max |
|
|
|
|
1 |
1 |
|
|
|
|
. |
(3.24) |
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
4 f ( |
|
r2 |
|
|
|
|
|
|||||||
|
|
|
|
|
(x c x )2 r ) |
|
|||||||||
|
|
|
1 |
|
1 |
|
1 |
1 |
2 |
1 |
|
|
|||
Знак плюс в выражениях M max |
и sКР |
соответствует режиму двигате- |
|||||||||||||
ля АМ, а знак минус – генераторному режиму. Из (3.23) видно, что значение M max в генераторном режиме больше, чем в двигательном.
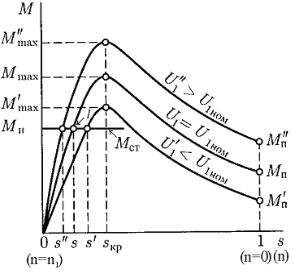
Механической характеристикой АМ, строго говоря, называют зависимость полезного момента M 2 на валу от скольжения s (или частоты
113

вращения n ) при |
U1 const и f1 const . Электромагнитный |
момент |
||||||
M M 2 M 0 , где M 0 |
- момент, обусловленный потерями pМХ |
и pд . По- |
||||||
|
|
скольку |
M 0 |
значи- |
||||
|
|
тельно меньше M 2 и |
||||||
|
|
M , то им или прене- |
||||||
|
|
брегают, или |
относят |
|||||
|
|
его к |
M СТ |
– моменту |
||||
|
|
механизма, |
|
приводи- |
||||
|
|
мого |
|
во |
вращение |
|||
|
|
асинхронным |
двига- |
|||||
|
|
телем. |
Поэтому |
M |
||||
|
|
практически равен M 2 |
||||||
|
|
и в качестве механи- |
||||||
|
|
ческой |
характеристи- |
|||||
|
|
ки будем |
рассматри- |
|||||
|
|
вать |
|
зависимость |
||||
|
|
M f ( s ) . На рис.3.12 |
||||||
Рис. 3.12 Механическая характеристика АМ |
показана |
механиче- |
||||||
ская |
характеристика |
|||||||
|
|
|||||||
|
|
АМ, |
рассчитанная |
по |
||||
(3.23), для всех трех возможных режимов работы. Момент при s 1, называют пусковым M П . Номинальный момент M Н , как отмечалось выше, бу-
дет при номинальном скольжении, лежащем в диапазоне (0,01 0,08). Характерной особенностью асинхронного двигателя (АД), наиболее распространенного типа АМ, является пропорциональность развиваемого им
момента от квадрата напряжения сети U12 . Это сказывается на эксплуата-
ционных свойствах АД. Например, как следует из выражения (3.23), при снижении напряжения сети на 10 % (U1 0,9U1H ), момент M уменьшится
на 19 % по сравнению с моментом при U1H .
Очень важное практическое значение имеет соотношение M M max для
АД, которое можно получить разделив выражение (3.23) на (3.24) и проведя несложное преобразование правых частей
|
|
|
|
|
|
2 |
2r1 |
s |
|
|
|
|
|
|
||||
M |
s |
c r |
кр |
|
|
. |
-------- |
|||||||||||
|
|
|
|
|
||||||||||||||
M |
|
|
sкр |
1 |
2 |
2r |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
max |
|
|
|
|
|
|
|
|
|
|
1 |
s |
кр |
|
|||
|
|
|
|
s |
кр |
|
s |
|
|
|
c r |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
1 2 |
|
|
|
|
|||
(3.25)
114
Если пренебречь членами |
|
2r1 |
s |
|
ввиду их малости по сравнению с |
|||||||
|
c r |
кр |
||||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
другими, то получим известную формулу Клосса |
||||||||||||
|
M |
|
|
|
|
|
2 |
|
|
. |
||
|
|
|
|
|
|
|
|
|||||
|
M |
max |
|
|
s |
|
sкр |
|||||
|
|
|
|
|
|
|
sкр |
s |
|
|
||
(3.26) |
|
|
|
|
|
|
|
|
|
|
|
|
Формула Клосса позволяет определить M max и sкр и построить меха-
ническую характеристику АД по известным M и s для каких либо двух режимом работы , например, номинального (M н , s н) и пускового ( M П , s =1).
При sкр = 0.15 0.3 погрешность в определении M MН по формуле Клосса
MН по формуле Клосса
лежит в диапазоне (10-15)% [1-5]. Более точно механическую характеристику можно построить по (3.25) , даже если неизвестны параметры r1 , r2 и
c1 , приняв значение 2r1  (c1 r2 ) 2 . На рис.3.13 представлены
(c1 r2 ) 2 . На рис.3.13 представлены
механические характеристики АД для трех значений U1 и зависи-
мость MСТ f ( s ) механизма , при-
водимого во вращение данным двигателем. Из анализа этого рисунка видно, что изменение питающего напряжения U1 сопровож-
дается изменением пускового M П и максимального моментов, а
также и изменением скольжения s (или частоты вращения ротора) при установившихся режимах работы (точках пересечения кривых
MСТ и M ).
Как видно из рис.3.12 и 3.13, при изменении скольжения в диапазоне АД обладает жесткой механической характеристикой, то есть при изменении нагрузки скорость вращения двигателя меняется мало. В этом же диапазоне изменения скольжения, обеспечивается устойчивая работа АД. Например, считаем, что двигатель работает в точке 1 на рис.3.13. Пусть под действием какой то кратковременной причины частота вращения n АД увеличится (или скольжение уменьшится), то есть рабочая точка отклонится от т.1 влево по кривой M f ( s ) . Тогда M СТ станет больше
чем M , на валу АД возникнет тормозной динамический момент, под действием которого частота вращения n начнет уменьшаться и двигатель вер-
115

нется в т.1. То же самое произойдет и при кратковременном отклонении от т.1 вправо, то есть при увеличении скольжения (или снижении n ). В этом случае M станет больше M СТ , на валу возникнет положительный динами-
ческий момент, частота вращения n начнет увеличиваться и двигатель опять вернется к работе в т.1.
Вполне очевидно, что для всех точек типа 1 механической характеристики в диапазоне 0< s < sкр выполняется условие dM  dn dMСТ
dn dMСТ  dn ,
dn ,
что и является признаком устойчивой работы. При s > sкр для любой точки механической характеристики АД dM  dn dMСТ
dn dMСТ  dn и работа машины будет неустойчивой. Например, если при работе в каком-то режиме со скольжением s > sкр под воздействием кратковременного возмущения АД
dn и работа машины будет неустойчивой. Например, если при работе в каком-то режиме со скольжением s > sкр под воздействием кратковременного возмущения АД
увеличит частоту вращения n , то прежняя скорость уже никогда не восстановится, а двигатель будет разгоняться до тех пор ,пока не придёт в точку типа 1.
На рис.3.14 представлены механические характеристики АД с фазным ротором при увеличении активного сопротивления ротора ( r2 I r2 II r2 III r2 IV ). Введение добавочного сопротивления в цепь ротора не
изменяет величину M max |
в соответствии с (3.24), но увеличивает значение |
||||||
sКР и пусковой момент. |
Увеличится также и скольжение в рабочих режи- |
||||||
мах ( sI sII sIII sIV ), |
а с учетом связи pЭЛ2 |
sPЭМ , потери в роторной |
|||||
обмотке увеличиваются и КПД понизится. |
|
|
|
|
|||
|
|
|
|
Отношение |
|||
|
|
|
максимального |
мо- |
|||
|
|
|
мента M max |
при но- |
|||
|
|
|
минальном |
питаю- |
|||
|
|
|
щем |
напряжении |
|||
|
|
|
U1H к номинальному |
||||
|
|
|
моменту |
M Н |
опре- |
||
|
|
|
деляет |
перегрузоч- |
|||
|
|
|
ную способность АД |
||||
|
|
|
и называется кратно- |
||||
Рис. 3.14 Механические характеристики |
стью максимального |
||||||
|
|
момента |
|||||
|
|
r2 |
|
|
|||
АД при изменении |
kM M max M H |
. Для |
|||||
|
|||||||
асинхронных двигателей разных мощностей и частот вращения kM |
лежит |
||||||
в диапазоне (1,7 2,5). |
|
|
|
|
|
|
|
АД с фазным ротором можно пускать в ход с помощью реостата, включаемого во вторичную цепь. При этом увеличивается пусковой момент (см. рис.3.14) и уменьшается пусковой ток I1п. Поэтому, не регламен-
116
тируются для АД с фазным ротором |
кратности пускового момента |
kп = Mп / Mн и пускового тока kпi = I1п / I1н. |
Для АД с короткозамкнутым ро- |
тором kп = (0,7 1,8) и kпi = (5,5 7). Основным способом пуска этих двигателей является прямой пуск. Если по условиям падения напряжения в сети прямой пуск невозможен, то применяются различные способы пуска двигателя при пониженном напряжении: переключением обмоток статора по схеме “звезда–треугольник”, что позволяет уменьшить в 3 раза пусковой ток в сети; автотрансформаторный пуск; реакторный пуск. [1–4].
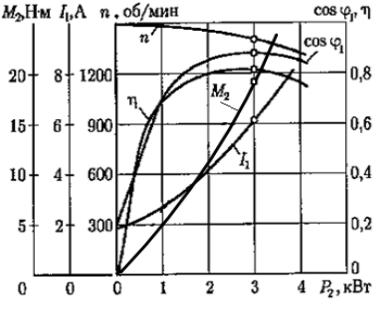
Рабочие характеристики асинхронного двигателя. Рабочими ха-
рактеристиками АД называются зависимости частоты вращения n , к.п.д. , полезного момента M 2 , коэффициента мощности cos 1 и тока статора I1 , от полезной мощности P2 при U1H const и f1H const . В качестве примера на рис.3.15 представлены рабочие характеристики АД мощностью 3 кВт. Как было рассмотрено в предыдущем разделе у АД мало меняется частота вращения с изменением нагрузки на валу, то есть АД имеет жесткую зависимость n f (P2 ) . Частота вращения n при P2 0 (или при s 0 ) равна n1 . С ростом P2 скольжение s будет увеличиваться и в соответствии с выра-
жением |
|
n n1 ( 1 s ) |
|||
частота |
вращения |
n |
|||
будет |
несколько |
па- |
|||
дать (см. рис.3.15). |
|
||||
|
Полезный |
мо- |
|||
мент M 2 |
асинхронного |
||||
двигателя |
с |
ростом |
|||
нагрузки |
возрастает |
||||
несколько |
|
быстрее |
|||
нагрузки |
и |
зависи- |
|||
мость |
M 2 f ( P2 ) име- |
||||
ет |
криволинейный |
||||
вид. Объясняется |
это |
||||
тем, что n с ростом |
|||||
нагрузки |
несколько |
||||
падает, а сам момент |
|||||
M 2 P2 /( 2 n ) . |
|
|
|||
Наименьшее значение cos 1 соответствует режиму |
х х |
( P2 0 ) и |
|||
обычно не превышает 0,2. Ток холостого хода состоит практически из реактивной составляющей, необходимой для создания магнитного поля и остающийся почти неизменным при любой нагрузке и U1 U1H const . При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и cos 1 возрастает, достигая наибольшего значения ( 0,8 0,9 ) при нагрузке близкой к номинальной. Дальнейшее увеличение нагрузки сопро-
117

вождается уменьшением cos 1 , что объясняется возрастанием индуктивного сопротивления ротора x2 s за счет увеличения скольжения.
Регулирование частоты вращения асинхронных двигателей.
Напомним, что частота вращения АД определяется как n n1 (1 s) ( f1 / p) (1 s) . Отсюда следует, что регулировать частоту вращения n АД можно изменением какой либо из трех величин: частоты f1 питающего тока, числа пар полюсов p обмотки статора и скольжения s .
Частотное регулирование позволяет применять наиболее надежные и дешевые АД с короткозамкнутым ротором. Для изменения частоты f1 можно применять полупроводниковый преобразователь частоты (ПЧ) или использовать синхронный генератор с переменной частотой вращения.
Если пренебречь в уравнении напряжения первичной обмотки (3.17) |
||
небольшим падением напряжения I |
z , то получим |
|
1 |
1 |
|
U1 E1 4.44w1kоб1 f1 |
(3.27) |
|
При регулировании частоты вращения n АД изменением |
f1 нежела- |
|
тельно изменять поток , так как увеличение выше номинального приведёт к насыщению магнитной системы и сильно увеличит намагничивающий ток, а уменьшение снизит степень использования машины, перегрузочную способность и так далее. Поэтому целесообразно поддерживатьпостоянным, для чего, как следует из (3.27), изменяя f1 следует также
пропорционально менять и |
напряжение, то есть соблюдать условие |
|
U1 f1 |
const . Если при этом |
поддерживать постоянным и ток I1 , то полу- |
чим |
закон частотного регулирования при обеспечении M const . Как пра- |
|
вило данный закон используется при регулировании частоты вращения от 0 до nН . Повышение n nН осуществляется, как правило, при U1 U1н и
увеличении f1 , следовательно при снижении потока, что аналогично
ослаблению поля в двигателях постоянного тока. Изменение основных параметров АД при регулировании скорости n представлено на рис 3.16. Следует отметить, что при значениях f1 близких к 0, сопротивление x1 практически равно нулю, но величина I1r1 будет сопоставима с напряжением U1 , что приведёт к необходимости более медленного снижения U1 , чем по закону U1  f1 const . Современные ПЧ выполняются с учётом этого явления, с так называемой ( I R ) компенсацией и зависимость U1 f (n) на рис 3.16, также как и f1 f (n) , можно строить от 0.
f1 const . Современные ПЧ выполняются с учётом этого явления, с так называемой ( I R ) компенсацией и зависимость U1 f (n) на рис 3.16, также как и f1 f (n) , можно строить от 0.
118

Частотное регулирование позволяет плавно изменять частоту вращения n в широком диапазоне, что даёт возможность применения АД в регулируемом электроприводе, например, в электрической тяге.
Регулирование частоты вращения n изменением числа пар полюсов p на статоре применяют только для АД с короткозамкнутым ротором, которые в этом случае называются многоскоростными. Они выпускаются на 2,3 или 4 скорости. Двухскоростной двигатель имеет одну обмотку на статоре с переключением числа пар полюсов в отношении p1 : p2 2 :1 , трёх-
|
|
|
|
скоростной |
двигатель – две |
|
f1 |
Ф |
|
|
обмотки на статоре, одна из |
||
U1 |
М |
|
|
которых |
с |
переключением |
P2 |
|
|
|
p1 : p2 2 :1 , четырёхскорост- |
||
|
|
f1 |
|
|||
|
|
|
|
ной двигатель –две обмотки |
||
U1н |
|
|
U1 |
на статоре и обе с переклю- |
||
|
|
|
|
чением |
p1 : p2 2 :1. |
|
P1н |
|
|
P2 |
|
|
|
Фн |
|
|
|
|
|
|
Мн |
|
|
|
|
|
|
|
|
|
Ф |
|
|
|
|
|
|
М |
|
|
|
0 |
|
nн |
n |
|
|
|
|
|
|
|
|
||
Рис.3.16. Изменение основных параметров |
|
|
|
|||
АД при частотном регулировании его ско- |
|
|
|
|||
|
|
рости. |
|
|
|
|
119
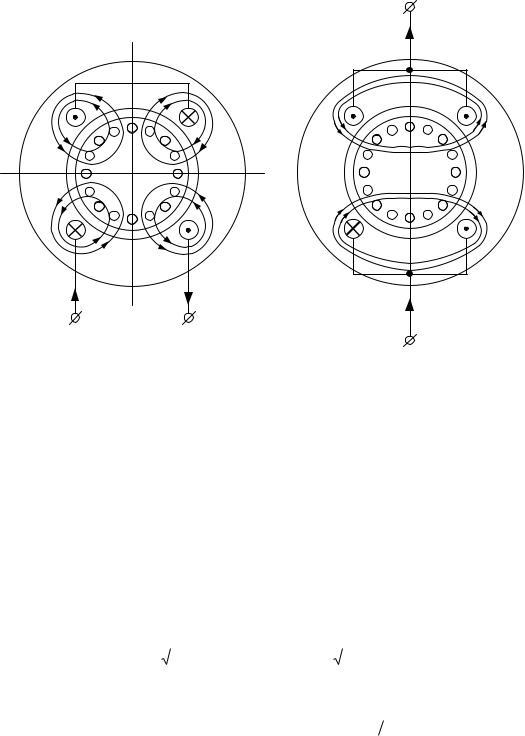
Каждая фаза обмотки с переключением числа пар полюсов состоит из двух частей ( полуфаз ) с одинаковым числом катушечных групп в каждой. Смысл двукратного изменения числа полюсов ясен из рис. 3.17, на котором представлены две полуфазы A X и фазы A статорной обмотки. Переключение полуфаз с последовательного (рис.3.17а) на парал-
|
|
|
|
I1ф |
|
а) |
|
|
б) |
|
|
X |
S |
A’ |
X |
S |
X’ |
|
|
||||
N |
2p=4 |
N |
N |
2p=2 |
S |
A |
|
X’ |
A |
|
A’ |
|
S |
|
|
S |
|
|
I1ф |
I1ф |
|
I1ф |
|
|
|
|
|
|
Рис.3.17.Последовательное (а) и параллельное (б) включение полуфаз простейшей обмотки
лельное (рис. 3.17б) соединение и позволяет осуществить изменение числа
пар полюсов в соотношении 2:1. |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Наиболее употребляемыми способами соединения статорных обмо- |
|||||||||||||||||
ток |
в многоскоростных АД являются “звезда”/ “двойная звезда” ( Y /YY ) и |
|||||||||||||||||
“треугольник”/ “двойная звезда ” ( /YY ). На рис. 3.18 представлен способ |
||||||||||||||||||
соединения обмотки Y /YY , где IФ - ток полуфазы обмотки . Так как при со- |
||||||||||||||||||
единении в Y полуфазы |
соединены последовательно , а в YY – параллель- |
|||||||||||||||||
но, |
то очевидно, что nYY 2ny . Найдём мощности |
на валу |
АД для |
|
двух |
|||||||||||||
способов соединения обмотки ,положив, что при одинаковых значениях I |
||||||||||||||||||
практически одинаковыми будут и cos 1 |
для обоих частот вращения nY и |
|||||||||||||||||
n . |
Следовательно, P |
|
|
|
|
I cos и |
|
|
|
|
|
2I cos |
, где U |
|
- ли- |
|||
|
3U |
1 |
P |
|
3U |
1 |
||||||||||||
YY |
2Y |
|
|
|
|
|
1 |
2YY |
|
1 |
|
1 |
|
|
||||
нейное напряжение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом P2YY |
2P2Y . Но, при этом, |
и nYY 2nY . Следовательно, |
|||||||||||||||
MY |
MYY , а схему соединения статорной обмотки Y YY |
называют схемой |
||||||||||||||||
переключения с M const . Аналогичным образом несложно показать, что схема соединения  YY является схемой переключения с P2 const .
YY является схемой переключения с P2 const .
120