

Электрические машины. Давидчук, Лебедев. Конспект лекций
.pdfющие процесс регулирования частоты вращения ДПТ при постоянном моменте на валу и изменении различных параметров регулирования, также могут быть получены из семейства механических характеристик, снятых при различных значениях параметров регулирования. Параметрами регулирования в зависимости от типа ДПТ могут быть подводимое напряжение, ток возбуждения, добавочные и шунтирующие сопротивления в цепи якоря.
Таким образом, можно предположить, что механическая характеристика позволяет проводить оценку свойств ДПТ как в различных режимах нагрузки, так и при различных условиях регулирования частоты вращения, и ее можно рассматривать на данном этапе изучения как основную эксплуатационную характеристику ДПТ. Согласно (1.21) Mс
Mc Mв M0 M2 M0 . ДПТ может работать в любой точке заданной механической характеристики с постоянной частотой вращения n const при условии (т. е. при Mдин 0 ). При изменении частоты вращения (при переходе с одной механической характеристики на другую) Mдин M Mc 0 .
Важным свойством любого электрического двигателя, в том числе и ДПТ, является условие устойчивой работы при небольших колебаниях нагрузки на валу. Под устойчивостью здесь следует понимать возврат двигателя в исходную (первоначальную) рабочую точку после окончания возмущающего воздействия.
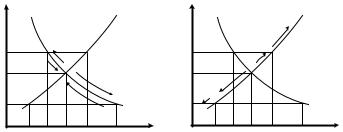
Рассмотрим два простых примера. На рис. 1.35, а представлена падающая механическая характеристика электрического двигателя n f (M )
и возрастающая механическая характеристика приводного механизма n f (Mc ) . В точке 1 (точке пересечения механических характеристик) двигатель будет, согласно первому закону Ньютона, работать с постоянной частотой вращения n1 const , поскольку в этой точке M1 Mc1 и
Mдин1 M1 Mc1 0.
Пусть под действием внешнего кратковременного колебания нагрузки частота вращения изменилась, например, увеличилась до уровня n2 n1 (точка 2 на рис. 1.35, а). Как видно из рисунка, в этом случае произошло снижение M и увеличение M c , т. е. M2 Mc2 . На валу двигателя появился отрицательный (т. е. тормозной) динамический момент M M2Mc2 0 , частота вращения под действием этого момента стала снижать-
ся до тех пор, пока M1 Mc1 , Mдин1 M1 Mc1 0 и n n1 const . Таким образом, после кратковременного колебания нагрузки и некоторого увеличения частоты вращения двигатель вернулся в исходную рабочую точку 1.
51
а) |
|
|
|
|
|
б) |
|
|
|
|
n |
M |
|
|
Mc |
|
|
n |
Mc |
|
M |
n2 |
2 |
|
|
|
|
n5 |
|
|
|
5 |
|
1 |
|
|
|
|
|
4 |
|
||
n |
|
|
|
|
n4 |
|
|
|
||
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
M |
|
n3 |
|
M |
|
3 |
|
n6 |
6 |
|||
|
1 |
|
|
|
|
4 |
|
|||
|
M |
|
M |
|
|
M |
||||
|
|
|
|
|
|
|||||
|
|
1c |
|
|
|
|
|
4c |
M |
|
0 Mc3 M2 |
Mc2 M3 |
|
0 M6 Mc5 |
M5 Mc6 |
||||||
Рис. 1.35. Механические характеристики электродвигателя |
||||||||||
в режимах устойчивой (а) и неустойчивой (б) работы |
||||||||||
Если под действием внешнего кратковременного колебания нагрузки частота вращения несколько уменьшилась до уровня n3 n1 (точка 3 на
рис. 1.35, а), то, согласно рисунку, M3 Mc3 , Mдин3 M3 Mc3 0 , частота вращения начнет возрастать, пока M1 Mc1 , Mдин1 M1 Mc1 0 и
n n1 const . Следовательно, двигатель сохраняет свою устойчивость
(рис. 1.35, а) как при увеличении частоты вращения, так и при ее снижении. На рис. 1.35, б представлена возрастающая механическая характери-
стика электрического двигателя n f (M ) и падающая механическая характеристика приводного механизма n f (Mc ) . В точке 4 (точке пересечения механических характеристик) двигатель будет, согласно первому за-
кону Ньютона, также работать |
с постоянной |
частотой вращения |
n4 const , поскольку в этой точке |
M4 Mc4 и Mдин4 |
M4 Mc4 0 . |
Пусть под действием внешнего кратковременного колебания нагрузки частота вращения изменилась, например, увеличилась до уровня n5 n4 (точка 5 на рис. 1.35, б). Как видно из рисунка, в этом случае произошло увеличение M и снижение M c , т. е. M5 Mc5 . На валу двигателя появился положительный (т. е. разгонный) динамический момент Mдин5 M5Mc5 0, и частота вращения под действием этого момента стала еще
больше возрастать. Таким образом, после кратковременного колебания нагрузки и некоторого увеличения частоты вращения двигатель в исходную рабочую точку 1 уже самостоятельно не вернется.
Если под действием внешнего кратковременного колебания нагрузки частота вращения несколько уменьшилась до уровня n6 n4 (точка 6 на
рис. 1.35, б), то, согласно рисунку, M6 Mc6 , Mдин6 M6 Mc6 0, частота вращения начнет снижаться и двигатель может самопроизвольно остановиться. Следовательно, двигатель работает неустойчиво (рис. 1.35, б) как при увеличении частоты вращения, так и при ее сниже-
52
нии. Неустойчивая работа двигателя приводит на практике к резкому возрастанию частоты вращения («уходу в разнос») или остановке (режим короткого замыкания). Оба режима крайне опасны для двигателя, поэтому эксплуатация электрических двигателей в неустойчивых режимах запрещена.
На основании рис. 1.35, а и б определим условие устойчивой работы любого электрического двигателя. Для режима устойчивой работы
(рис. 1.35, а):
M |
2 |
M |
1 |
M |
2 |
0, M |
c2 |
M |
c1 |
M |
c2 |
0, n n n 0, M 2 |
0, |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
2 |
n2 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M c2 |
|
0, M 2 |
|
Mc2 |
|
|
dM 2 |
|
|
dMc2 |
, |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
n |
|
n |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
dn |
|
|
dn |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
2 |
|
|
2 |
|
|
|
|
|||||||||||
и аналогично |
dM3 |
|
|
|
dM c3 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
dn3 |
dn3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Для режима неустойчивой работы (рис. 1.35, б): |
|
|
|
|||||||||||||||||||||||||||||||||||||
M |
5 |
M |
4 |
M |
5 |
0, M |
c5 |
M |
c4 |
|
M |
c5 |
0, n n n 0, M5 |
0, |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
4 |
|
5 |
n5 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M c5 |
|
0, M5 |
|
|
Mc5 |
|
|
dM5 |
|
|
dMc5 |
|
, |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
n |
|
|
n |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
dn |
|
|
dn |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
5 |
|
|
5 |
|
|
5 |
|
|
5 |
|
|
|
|
|||||||||||
и аналогично |
dM6 |
|
dM c6 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
dn6 |
|
dn6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Эти результаты позволяют сформулировать общее для всех электри- |
||||||||||||||||||||||||||||||||||||||||
ческих двигателей, в том числе и ДПТ, условие устойчивой работы: |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dM |
|
dMc |
. |
|
|
|
|
|
|
(1.23) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dn |
|
|
|
|
dn |
|
|
|
|
|
|
|
||||||||
На рис. 1.36, а представлены возможные варианты механических характеристик электрических двигателей: 1 – абсолютно жесткая (частота вращения двигателя не меняется при любом изменении нагрузки на валу), 2 – жесткая (частота вращения при увеличении нагрузки падает незначительно), 3 – мягкая (частота вращения при увеличении нагрузки падает достаточно заметно), 4 – возрастающая (частота вращения при увеличении нагрузки также начинает возрастать). На рис. 1.36, б представлены варианты наиболее часто встречающихся статических моментов приводных механизмов электродвигателей: 5 – постоянный (не зависящий от частоты вращения, например, момент транспортера), 6 – линейно возрастающий
53
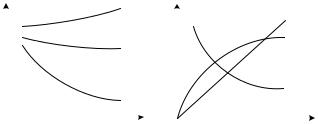
(момент ГПТ), 7 – параболически возрастающий (вентиляторный), 8 – гиперболически падающий (токарный).
Очевидно, что электродвигатель с механическими характеристиками 1 и 2 будет работать устойчиво при всех статических моментах 5, 6, 7, 8, с механической характеристикой 3 будет работать устойчиво при моментах 5, 6, 7 и при моменте 8, если характеристика двигателя будет несколько жестче, чем у приводного механизма. Электродвигатель с механической характеристикой 4 не может устойчиво работать с моментами 5 и 8, а с моментами 6 и 7 устойчивая работа будет зависеть от жесткости возрастающей механической характеристики двигателя. Поэтому двигатели с возрастающей механической характеристикой считаются малопригодными для эксплуатации.
а) б)
|
n |
4 |
|
n |
5 |
6 |
|
|
|
|
|
||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
|
7 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
8 |
|
|
|
|
|
|
|
Mc |
|||
|
|
|
M |
|
|
|
||
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
||
Рис. 1.36. Механические характеристики электродвигателей (а) и приводных механизмов (б)
Выражение для механической характеристики ДПТ параллельного возбуждения можно получить, используя (1.17), (1.18) и (1.20). Подставив в (1.17) выражение для ЭДС по (1.18), получим уравнение скоростной (электромеханической) характеристики шунтового ДПТ:
U Ua Ia Rд Ea Ia Ra Ia Rд cE n Ia (Ra Rд )
n |
U |
|
I |
(R R ) |
|
|
|
|
|
a |
a д |
, |
(1.24) |
||
cE |
|
|
cE |
||||
|
|
|
|
|
|||
где U Uc Ua Ia Rд – напряжение сети, от которой питается двигатель (так называемое подводимое напряжение); Rд – добавочное сопротивление
в цепи якоря.
Подставив теперь в (1.24) выражение для тока якоря через электромагнитный момент по (1.20), как Ia M / cM , получим уравнение механической характеристики шунтового ДПТ:
54
n |
U |
|
|
M Ra |
Rд |
|
n |
n M , |
(1.25) |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
c |
|
|
|
с c |
2 |
|
0 |
|
|
|
|
|
|
|
|
|||||
|
E |
|
E M |
|
|
|
|
|
||
где n0 – частота вращения |
в режиме |
|
холостого хода |
( M 0 ). На |
||||||
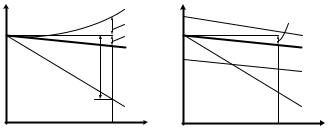
рис. 1.37, а представлены возможные варианты зависимости по (1.25) при Rд 0 , именуемые естественными механическими характеристиками. Кривая 1 характерна для машин средней и большой мощности без компенсационной обмотки. В этих машинах Ra весьма мало, и с ростом нагрузки на валу M и соответствующим ростом тока в обмотке якоря Ia происходит снижение магнитного потока из-за размагничивающего действия
поперечной реакции якоря Faq Ia в (1.19), что приводит к росту ча-
стоты вращения n в (1.25). Такая механическая характеристика непригодна для привода большинства производственных механизмов из-за невыполнения условия устойчивой работы (1.23).
а) |
|
б) |
|
|
|
n |
1 |
|
n |
nн |
|
n |
n1 |
n0 |
|
3 |
|
0 |
n2 |
1 |
|
|
1 |
|
|
|
|
||
n |
2 |
n02 |
|
|
|
3 |
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
4 |
|
M |
|
|
|
M |
0 |
|
0 |
|
Mн |
|
|
|
|
|
|
Рис. 1.37. Механические характеристики ДПТ параллельного возбуждения
С целью повышения устойчивости таких ДПТ в них обычно добавляют легкую согласную последовательную обмотку возбуждения ( Fc Ia
0,1Fш iв , включение согласно рис. 1.12, д), именуемую стабилизирующей, |
|
так чтобы Fc Ia Faq Ia 0 . В этом случае |
при iв const |
F Fш iв Fc Ia Faq Ia Fш iв const и |
const . Такой |
ДПТ полностью сохраняет свойства шунтового, но будет иметь механическую характеристику (кривая 2 на рис. 1.37, а), наклон которой определя-
ется только n M по (1.25). Поскольку Ra весьма мало, то и n M не-
велико, и механическая характеристика будет жесткой (с изменением нагрузки частота вращения изменится незначительно). В ДПТ малой мощ-
55
ности (до 1 кВт) Ra существенно выше, поэтому увеличивается n M и
изменяется наклон механической характеристики, которая становится мягкой (кривая 3, рис. 1.37, а).
Поскольку возрастающая механическая характеристика на практике не используется по соображениям устойчивости ДПТ, а мягкой характеристикой обладают ДПТ очень малой мощности, то при дальнейшем изучении свойств шунтового ДПТ в качестве естественной механической характеристики считаем кривую 2 на рис. 1.37, а.
На механическую характеристику шунтового ДПТ оказывают влия-
ние три основных параметра: U , iв , |
Rд . Характеристика при Rд 0 назы- |
|||
вается естественной, а при |
iв iвн и |
U Ua Uн – |
номинальной |
|
(рис. 1.37, б, кривая 1). При U Uн |
снижается по (1.25) n0 , |
а n M не |
||
меняется и характеристика |
идет |
ниже |
и параллельно |
номинальной |
(рис. 1.37, б, кривая 2), при iв iвн уменьшается (такой режим называется ослаблением поля) и увеличиваются n0 и n . Для большинства ДПТ
эта характеристика проходит выше номинальной и почти параллельно ей или пересекает ее выше номинальной нагрузки (рис. 1.37, б, кривая 3). В ДПТ малой мощности с ростом Ra это пересечение произойдет в зоне рабочих нагрузок. При введении в цепь якоря добавочного сопротивления Rд , согласно (1.25), n0 не меняется, но из-за роста n M изменяется
угол наклона механической характеристики (рис. 1.37, б, кривая 4), именуемой искусственной или реостатной, и она становится мягкой.
В ДПТ последовательного возбуждения при выводе выражения для механической характеристики необходимо учесть, что Iв Ia . Если пре-
небречь насыщением, то k Iв . Поскольку в сериесном ДПТ есть только две независимые переменные, U и Iв Ia , то для расширения воз-
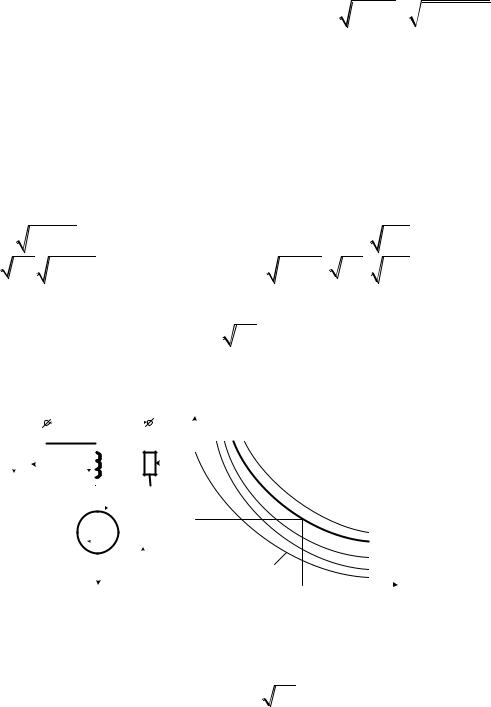
можностей регулирования пользуются методом шунтирования обмоток (рис. 1.38, а). При постоянной нагрузке на валу шунтирование обмотки возбуждения ведет к ослаблению магнитного потока, а шунтирование обмотки якоря – к усилению магнитного потока.
Токи в параллельных ветвях распределяются обратно пропорцио-
нально |
сопротивлению |
этих |
ветвей: Iв / Iшв rшв |
/ rc и Ia / Iшa |
(Ua |
||
Ea )Rшa / Ra /Ua . Коэффициенты шунтирования |
kшв 1 Iшв |
/ Iв 1 |
|||||
rc / rшв |
и kша 1 Iша / Ia 1 RaUa / Rша (Ua Ea ) |
будут равны |
1 при |
||||
rшв |
и Rша и |
будут |
больше 1 при |
rшв и Rша |
соответ- |
||
ственно. |
Сетевой ток |
I Iв |
Iшв Iвkшв Ia |
Iша |
Iakша , |
откуда Iв |
|
Ia kша / kшв . Магнитный поток k Iв k Ia kша / kшв . Электромагнитный
56
момент M c |
|
I |
a |
c |
k |
|
I 2k |
ша |
/ k |
шв |
, откуда |
I |
a |
|
Mk |
шв |
||||||||||||||
|
M |
|
|
|
M |
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Скоростная характеристика сериесного ДПТ: |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
n |
U |
|
|
Ia Ra Rд |
|
|
Uk |
шв |
|
Ia Ra Rд kшв |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
cE |
|
|
cE |
|
|
|
cE k Ia kша |
|
|
|
|
cE k Ia kша |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
U |
|
|
|
|
Ra Rд |
k |
шв |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cE k |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
cE k Ia |
|
|
|
|
|
kша |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
/ 
 cM k kша .
cM k kша .
(1.26)
и соответственно механическая характеристика сериесного ДПТ:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ra Rд kшв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
n |
U cM kшв |
1 |
|
|
U |
kшв |
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
cE |
|
M k kша |
|
|
|
cE k kша |
|
|
2 cM k |
|
M kша |
(1.27) |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ra |
|
Rд k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шв |
|
|
C |
C |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
. |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
k |
|
|
|
|
|
k |
|
|
|
|
|
M |
2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
ша |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
I |
шв |
|
|
|
|
|
|
|
|
rшв |
Iв |
|
С1 |
|
|
|
|
|
|
Rд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Я1 |
Ia |
|
С2 |
Я 2 |
|
|
|
nн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Rша |
|
|
|
|
ша |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
M |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
3 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
Mн |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Рис. 1.38. Включение шунтирующих и добавочных сопротивлений |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
в схему сериесного ДПТ (а) и его механические характеристики (б) |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
Из этого выражения видно, что n 1/ |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
M , и поэтому даже номи- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
нальная механическая характеристика (рис. 1.38, б, кривая 1) носит гиперболический характер и, следовательно, достаточно мягкая. При уменьшении подводимого напряжения U (кривая 2), введении добавочного сопротивления в цепь якоря Rд (кривая 3) или шунтировании обмотки
якоря Rша и kша 1 (кривая 4) характеристика идет ниже, а при шунтировании обмотки возбуждения rшв и kшв 1 (кривая 5) – выше номинальной.
57
«Разносом ДПТ» называется резкое увеличение частоты вращения n при сильном ослаблении поля возбуждения ( iв 0 ). В шунтовом ДПТ это происходит при обрыве цепи возбуждения ( iв 0 ), а в сериесном ДПТ Iв Ia и величина поля определяется нагрузкой на валу M . Поэтому ДПТ
последовательного возбуждения работают только с нагрузкой на валу, режим холостого хода ( M 0 ) для них недопустим, за исключением случая шунтирования обмотки якоря ( Rша и kша 1), так как при этом по об-
мотке возбуждения протекает ток Iша , который обеспечивает необходи-
мый магнитный поток (кривая 4 на рис. 1.38, б).
Реверсом ДПТ называется изменение направления вращения якоря в двигательном режиме работы. Согласно принципу действия, двигатель постоянного тока изменит направление вращения, если изменится направление тока в обмотке якоря при неизменном направлении потока главных полюсов или если изменится направление потока главных полюсов при неизменном направлении тока якоря (см. принцип действия МПТ). Следовательно, реверс ДПТ произойдет, если поменять полярность включения обмотки якоря или поменять полярность включения обмотки возбуждения. Одновременное изменение полярностей включения обмотки якоря и обмотки возбуждения не приводит к изменению направления вращения двигателя.
Пуск ДПТ. В начальный момент пуска Ea cE n 0 , так как n 0 и Ua U Ea Iа Ra Iа Ra , поэтому пусковой ток IП U / Ra10 50 Iан . Бросок тока якоря при пуске ведет к кратковременной пе-
регрузке сети и возникновению динамических нагрузок на валу. Следствием этого могут быть снижение сетевого напряжения, отключения в защитной аппаратуре, подгорание щеток на коллекторе, старение изоляции, износ подшипников. Поэтому прямой пуск (прямое включение на сеть с U Uн ) применяется только в ДПТ небольшой мощности (обычно не бо-
лее 1 КВт).
Ограничить пусковой ток в более крупных машинах можно либо путем введения в момент пуска в цепь якоря добавочных пусковых сопротивлений ( IП Uн /(Ra RП ) ), либо путем снижения в момент пуска пи-
тающего напряжения. Применение реостатного пуска ведет к увеличению эксплуатационных расходов из-за потерь энергии на пусковых реостатах, а для снижения подводимого напряжения нужен соответствующий источник питания (ГПТ или полупроводниковый преобразователь), т. е. более высокие капитальные затраты.
Прямой пуск ДПТ параллельного возбуждения без нагрузки на валу представлен на рис. 1.39. В момент подключения ДПТ к сети постоянного
58
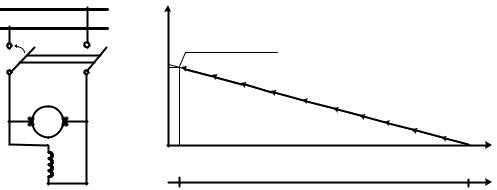
тока с помощью рубильника П1 (рис. 1.39, а) происходит бросок тока в |
||||||||
обмотке якоря до уровня IП U / Ra 10 50 Iан |
и соответственно бро- |
|||||||
сок электромагнитного момента M cM IП (10 50)Mн |
(точка 1 на |
|||||||
рис. 1.39, б). |
Поскольку |
динамический |
момент |
на |
валу |
двигателя |
||
Mдин M Mc |
MП M0 0 , то под его действием якорь ДПТ придет |
|||||||
во вращение с некоторым ускорением. С ростом частоты вращения якоря |
||||||||
n будет расти и ЭДС в обмотке якоря Ea cE n, что станет причиной |
||||||||
снижения тока якоря Ia |
(U Ea ) / Ra . Уменьшение тока якоря вызовет |
|||||||
снижение электромагнитного и соответственно динамического момента на |
||||||||
валу ДТП. Следовательно, ускорение вращения якоря тоже снизится, т. е. |
||||||||
процесс разгона якоря начнет замедляться. В точке 2 на рис. 1.39, б элек- |
||||||||
тромагнитный момент станет равен статическому M Mc M0 , динами- |
||||||||
ческий момент |
Mдин M Mc 0 , разгон якоря |
прекратится, |
и ДПТ |
|||||
начнет работать с постоянной частотой вращения n0 . |
|
|
|
|||||
а) |
|
|
б) |
|
|
|
|
|
U |
|
|
n |
|
|
|
|
|
|
|
Mc M0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П1 |
|
|
n0 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Я1 |
|
Я 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
M |
|
Ш1 |
M0 |
|
|
|
|
|
|
|
Ш2 |
|
|
|
M П |
|||
|
|
|
|
|
|
I a |
||
|
|
|
Ia0 |
|
|
|
I |
|
|
|
|
|
|
|
П |
||
|
|
Рис. 1.39. Схема (а) и механическая характеристика (б) |
|
|
||||
|
|
прямого пуска шунтового ДПТ без нагрузки на валу |
|
|
|
|||
Прямой пуск двигателя последовательного возбуждения без нагрузки на валу осуществлять не следует, так как после разгона якоря ДПТ «уйдет в разнос» из-за малого тока якоря при холостом ходе и соответственно малого потока под полюсами.
На рис. 1.40 представлен прямой пуск сериесного ДПТ при Mc Mн
. Процесс аналогичен представленному на рис. 1.39. Однако следует учесть, что при условии одинаковых пусковых токов IП U / Ra пусковой
59
момент шунтового ДПТ MП IП , а пусковой момент сериесного ДПТ
MП IП2 , т. е. существенно больше.
60