

43. Транспонирование и его свойства.
Замена строк матрица на столбцы, а столбцов на строки – называется транспонированием матрицы .
Св-ва:
(АT)T=A (AB)T=BTAT (A+B)T=AT+BT
(АТ)-1=(А-1)Т
44. Система линейных уравнений и её решение.
Будем
рассматривать системы из p линейных
алгебраических уравнений с nнеизвестными
переменными (p может
быть равно n)
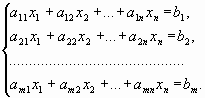
вида

![]() -
неизвестные переменные,
-
неизвестные переменные, ![]() -
коэффициенты (некоторые действительные
или комплексные числа),
-
коэффициенты (некоторые действительные
или комплексные числа), ![]() -
свободные члены (также действительные
или комплексные числа).
-
свободные члены (также действительные
или комплексные числа).
Такую форму записи СЛАУ называют координатной.
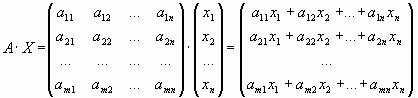
В матричной
форме записи
эта система уравнений имеет вид ![]() ,
где
,
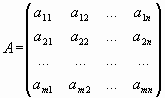
где 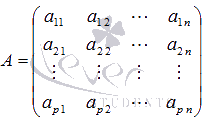 -
основная матрица системы,
-
основная матрица системы, ![]() -
матрица-столбец неизвестных переменных,
-
матрица-столбец неизвестных переменных, ![]() -
матрица-столбец свободных членов.
-
матрица-столбец свободных членов.
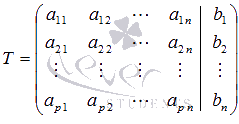
Если
к матрице А добавить
в качестве (n+1)-ого столбца
матрицу-столбец свободных членов, то
получим так называемую расширенную
матрицу системы
линейных уравнений. Обычно расширенную
матрицу обозначают буквой Т,
а столбец свободных членов отделяют
вертикальной линией от остальных
столбцов, то есть,
Решением
системы линейных алгебраических
уравнений называют
набор значений неизвестных переменных ![]() ,
обращающий все уравнения системы в
тождества. Матричное уравнение
,
обращающий все уравнения системы в
тождества. Матричное уравнение ![]() при
данных значениях неизвестных переменных
также обращается в тождество
при
данных значениях неизвестных переменных
также обращается в тождество ![]() .
.
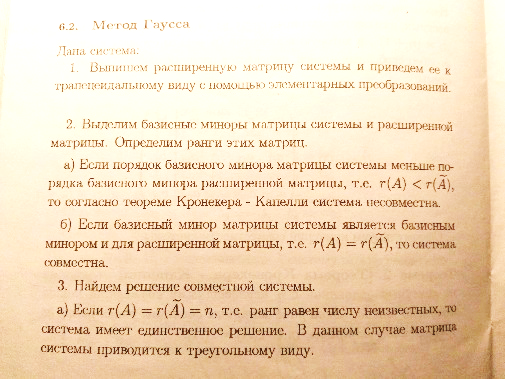
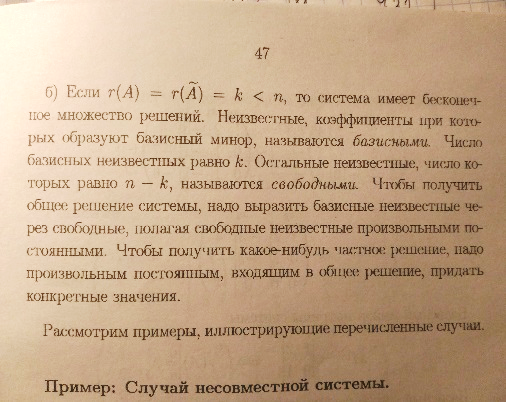
45. Метод Гаусса для решений совместной системы линейных уравнений.
46. Однородная, неоднородная, совместная, несовместная, определенная и неопределенная система. Матричная запись системы линейных уравнений.
Совместная система - имеет хотя бы 1 решение.
Несовместная система - не имеет решений.
Определенная - имеет единственное решение.
Неопределенная – имеет бесконечно много решений.
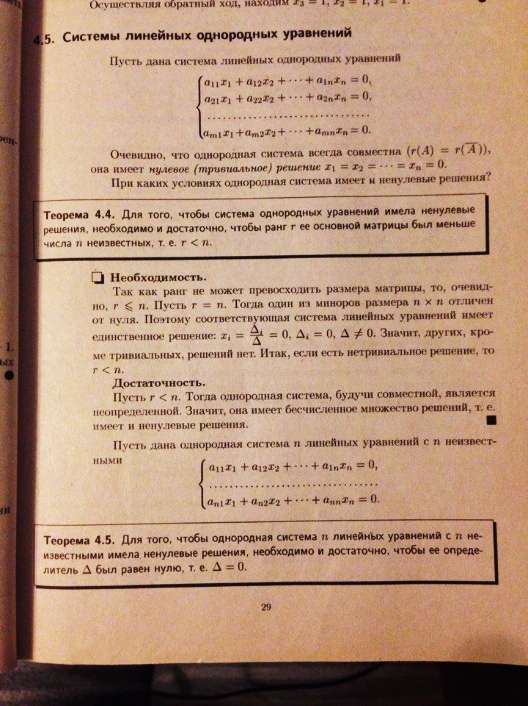
Однородная система - все свободные члены равны 0. Всегда совместна. Имеет только нулевое решение тогда и только тогда, когда ранг матрицы равен числу неизвестных. Имеет ненулевые решения тогда и только тогда, когда ранг матрицы меньше числа неизвестных.
Решить систему - значит выяснить, совместна она или несовместна. Если система совместна, то найти ее общее решение.
Эквивалентные(равносильные) системы - имеющие одно и то же общее решение, т.е. каждое решение 1 системы является решением другой, и наоборот.
Эквивалентные системы получаются при элементарных преобразованиях системы при условии, что они выполняются лишь над строками матрицы.
Рассмотрим систему линейных алгебраических уравнений
Обозначим:
 ,
, ![]() ,
, ![]() ,
,
A — матрица системы, B — правая часть, X — матрица-столбец неизвестных.
Тогда:
и
рассмотренная система
эквивалентна матричному уравнению A·X
= B, в том
смысле, что если числа ![]() являются
решением рассмотренной системы, то
соответсвующая матрица-столбец X является
решением матричного уравнения; и
наоборот, если матрица-столбец X является
решением матричного уравнения, то ее
элементы
являются
решением рассмотренной системы, то
соответсвующая матрица-столбец X является
решением матричного уравнения; и
наоборот, если матрица-столбец X является
решением матричного уравнения, то ее
элементы ![]() являются
решением рассмотренной системы.
являются
решением рассмотренной системы.
47. Теорема о решении однородной системы линейных уравнений.
![]()