

5. Переход от декартовой к полярной системе координат и обратно.
![]() О
— полюс, ρ —
полярный радиус, φ —
полярный угол
О
— полюс, ρ —
полярный радиус, φ —
полярный угол
Переход от полярной системы координат к декартовой
Если полюс полярной системы координат совместить с началом прямоугольной системы координат, а полярную ось с положительной полуосью Ox, то по известным полярным координатам точки А( ρ; φ) ее прямоугольные координаты вычисляются по формулам:
x1=ρ*cosφ
y1=ρ*sinφ
Переход от декартовой системы координат к полярной
![]()
6. Преобразование координат для прямоугольной системы координат методом сдвига и поворота.
Преобразование декартовых прямоугольных координат при параллельном сдвиге осей определяется формулами
х = х'+ а, у=у'+ b.
Здесь х, у суть координаты произвольной точки М плоскости относительно старых осей, х', у' — координаты той же точки относительно новых осей, а, b — координаты нового начала О' относительно старых осей (говорят также, что а есть величина сдвига в направлении оси абсцисс, b — величина сдвига в направлении оси ординат).
Преобразование декартовых прямоугольных координат при повороте осей на угол (который надо понимать, как в тригонометрии) определяется формулами
x = х' cos — y sin ,у = x' sin — у' cos .
Здесь х, у суть координаты произвольной точки М плоскости относительно старых осей, х’, у’ — координаты той же точки относительно новых осей.
Формулы x = х' cos — y sin + а, у = х' sin + y cos + b
определяют преобразование координат при параллельном сдвиге системы осей на величину а в направлении Ох, на величину b в направлении Оу и последующем повороте осей на угол .
Все указанные формулы соответствуют преобразованию координат при неизменном масштабе
7. Алгебраическая линия и её порядок. Теорема об инвариантности порядка.


![]()
Теорема об инвариантности порядка алгебраической линии
Если в некоторой аффинной системе координат на плоскости линия задана уравнением (3.4), то и в любой другой аффинной системе координат эта линия задается уравнением того же вида (3.4) и той оке степени.
Действительно,
пусть в аффинной системе координат ![]() уравнение
имеет вид (3.4):
Получим уравнение этой
линии в другой (новой) аффинной системе
координат
уравнение
имеет вид (3.4):
Получим уравнение этой
линии в другой (новой) аффинной системе
координат ![]() .
Старые координаты точки связаны с
новыми ее координатами выражениями
(2.8):
.
Старые координаты точки связаны с
новыми ее координатами выражениями
(2.8):
где ![]() —
координаты вектора переноса начала
координат
—
координаты вектора переноса начала
координат ![]() ,
а
,
а ![]() —
элементы матрицы перехода базиса
—
элементы матрицы перехода базиса ![]() к
новому . Подставим эти выражения в
одночлен
к
новому . Подставим эти выражения в
одночлен ![]() :
:
Раскрывая
скобки, получаем многочлен двух
переменных ![]() ,
степень которого не больше, чем
,
степень которого не больше, чем ![]() .
Аналогичные многочлены получим из
других одночленов, входящих в левую
часть (3.4). Сложив эти многочлены, получим
многочлен
.
Аналогичные многочлены получим из
других одночленов, входящих в левую
часть (3.4). Сложив эти многочлены, получим
многочлен ![]() ,
степень которого не превосходит степени
исходного многочлена
,
степень которого не превосходит степени
исходного многочлена ![]() .
Таким образом, при замене системы
координат порядок алгебраической линии
не увеличивается. Но он не может и
уменьшиться, так как если порядок
уменьшится при переходе к новой системе
координат, то он должен увеличиться
при обратном переходе к старой системе
координат. Следовательно, порядок
алгебраической линии остается неизменным
в любой аффинной системе координат
(говорят, что порядок алгебраической
линии является инвариантом). Теорема
доказана.
.
Таким образом, при замене системы
координат порядок алгебраической линии
не увеличивается. Но он не может и
уменьшиться, так как если порядок
уменьшится при переходе к новой системе
координат, то он должен увеличиться
при обратном переходе к старой системе
координат. Следовательно, порядок
алгебраической линии остается неизменным
в любой аффинной системе координат
(говорят, что порядок алгебраической
линии является инвариантом). Теорема
доказана.
8. Уравнение прямой на плоскости, проходящей через две заданные точки.

9. Уравнение прямой с угловым коэффициентом. Пучок прямых.

10. Уравнение прямой, проходящей через заданную точку в заданном направлении.

11. Угол между двумя прямыми.
Пусть прямые l1 и l2 заданы уравнениями: l1: y=k1x+в1 l2: y=k2x+в2
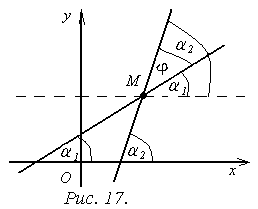 c
углами наклона к оси Ох соответственно
φ1 и
φ2 (рис.2).
c
углами наклона к оси Ох соответственно
φ1 и
φ2 (рис.2).
Обозначим через φ1 угол наклона прямой l1 к оси Ох и через φ угол, на который нужно повернуть прямую l1до совпадения с l2 (рис. 6). Тогда φ1+φ=φ2 будет, очевидно, углом наклона прямой l2 к оси Oх. Отсюда φ=φ2-φ1 и если прямые l1 и l2 не являются перпендикулярными, то (по известной формуле тригонометрии)
![]()
Заметив, что tgφ1=k1 и tgφ2=k2 получим:
![]() (9)
(9)
12. Условия параллельности и перпендикулярности прямых.
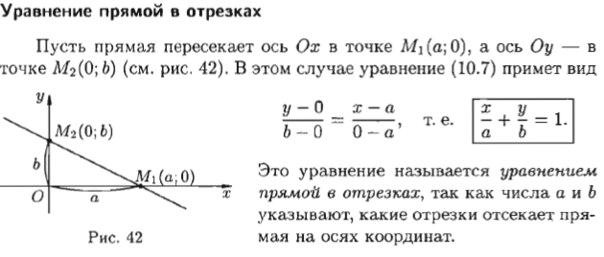
13. Уравнение прямой в отрезках на осях.
14. Общее уравнение прямой на плоскости.

15. Решение неравенств на плоскости.
Графическое представление функций позволяет приближённо решать неравенства с одним неизвестным и системы неравенств с одним и двумя неизвестными. Чтобы решить графически неравенство с одним неизвестным,необходимо перенести все его члены в одну часть, т.e. привести к виду: f ( x ) > 0 ,
и
построить график функции y = f ( x ). После
этого, используя
построенный график, можно найти нули
функции (см. выше),
которые разделят ось Х
на
несколько интервалов. Теперь на основе этого определим интервалы x, внутри
которых знак функции соответствует
знаку неравенства. Например, нули
нашей функции: a и b ( рис.30 ). Тогда
из графика очевидно, что интервалы, внутри которых f ( x )
> 0: x < a и x > b ( они
выделены жирными стрелками ).
Ясно, что знак > здесь
условный; вместо него может быть любой
другой: < , ![]() ,
, ![]() .
.
Чтобы решить графически систему неравенств с одним неизвестным, нужно перенести в каждом из них все члены в одну часть, т.e. привести неравенства к виду:
и
построить графики функций y = f ( x ), y = g ( x )
, ... , y = h ( x ). Каждое из
этих неравенств решается графическим
методом, описанным выше. После
этого нужно найти пересечение
решений всех
неравенств, т.e. их общую часть.![]()