69. Взаимно однозначные отображения.
Пусть ^A: Xn → Xn — некоторый оператор (не обязательно линейный), D М Xn — область определения и E М Xn — область значений этого оператора.
Оператор ^A:Xn → Xn называется взаимно однозначным, если из равенства образов следует равенство прообразов:
|
"x1, x2 О D ^Ax1 = ^Ax2 ЬЮ x1 = x2. |
Пусть теперь ^A:Xn → Xn — линейный оператор. Справедлива следующая
Теорема 1. Для того, чтобы линейный оператор ^A:Xn → Xn осуществлял взаимно однозначное отображение, необходимо и достаточно, чтобы Ker ^A = θ .
Доказательство см. в книге О.В. Зиминой ``Линейная алгебра и аналитическая геометрия".
Следствие. Для того, чтобы линейный оператор ^A:Xn → Xn осуществлял взаимно однозначное отображение, необходимо и достаточно, чтобы Rg ^A = n , где n — размерность пространства.
Рассмотрим оператор ^A: Xn → Xn (не обязательно линейный), осуществляющий взаимно однозначное отображение.
Оператор ^B: Xn → Xn называется обратным оператору ^A:D М Xn → Xn , если "x О D : ^B(^Ax) = x , т.е.
|
^B°^A = ^E, |
где ^E — тождественный оператор. Обозначая обратный оператор ^A − 1 , получаем определение обратного оператора в виде
|
^A − 1°^A = ^E. |
Теорема 2. Для того, чтобы оператор ^A: D М Xn → E М Xn имел обратный, необходимо и достаточно, чтобы он осуществлял взаимно однозначное отображение.
70. Произведение операторов. Обратный оператор.
Произведением
линейных операторов А и В из ![]() называется
оператор АВ, определяемый следующим
образом: (А В)
называется
оператор АВ, определяемый следующим
образом: (А В)![]() А(В
А(В![]() для
любого
для
любого ![]() из V.
Произведение линейных операторов тоже
будет линейным оператором.
из V.
Произведение линейных операторов тоже
будет линейным оператором.
Справедливы следующие свойства умножения линейных операторов:
1. a(АВ) = (aА )В.
2. (АВ)Е = А (ВЕ).
3. (А + В)Е = АЕ + ВЕ, Е(А + В) = ЕА + ЕВ.
Умножение линейных операторов, вообще говоря, некоммутативно.
Легко
увидеть, что для всякого линейного
оператора А А![]() .
При этом если А
.
При этом если А![]() только
при
только
при ![]() ,
то оператор называется невырожденным;
если же найдется такой вектор
,
то оператор называется невырожденным;
если же найдется такой вектор ![]() ,
что А
,
что А![]() ,
то оператор А– вырожденный.
,
то оператор А– вырожденный.
Линейный
оператор В из ![]() называется обратным для
оператора А из
называется обратным для
оператора А из ![]() ,
если выполняется соотношение АВ = ВА = Е.
Обратный оператор обычно обозначается
как А–1.
Для того чтобы линейный оператор А из
,
если выполняется соотношение АВ = ВА = Е.
Обратный оператор обычно обозначается
как А–1.
Для того чтобы линейный оператор А из ![]() имел
обратный, необходимо и достаточно,
чтобы он был невырожденным.
имел
обратный, необходимо и достаточно,
чтобы он был невырожденным.
Будем
говорить, что линейный
оператор А действует взаимно
однозначно из V в V,
если любым двум различным
элементам ![]() и
и ![]() отвечают
различные элементы
отвечают
различные элементы ![]() А
А![]() и
и ![]() А
А![]() .
Для того чтобы линейный оператор А
из
.
Для того чтобы линейный оператор А
из ![]() имел
обратный, необходимо и достаточно,
чтобы этот оператор действовал взаимно
однозначно из V в V.
имел
обратный, необходимо и достаточно,
чтобы этот оператор действовал взаимно
однозначно из V в V.
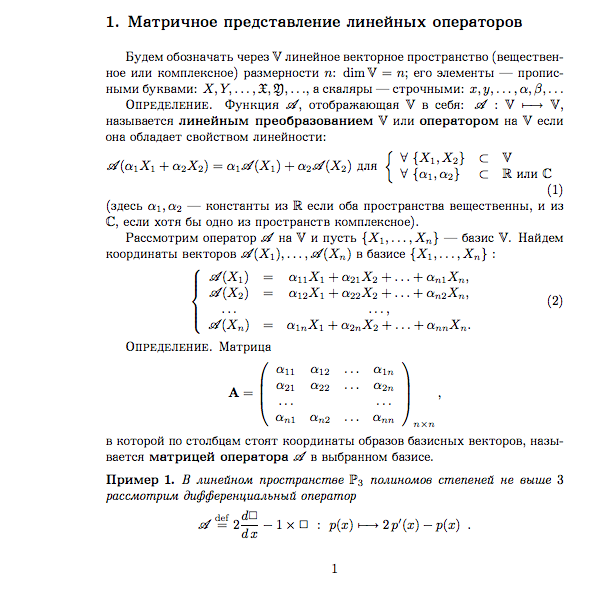
71. Теорема о представлении оператора в виде матрицы.
72. Произведение линейных отображений.