

52. Пространство Rn и линейные операции в этом пространстве.

53. Система векторов. Линейно зависимые и независимые векторы.


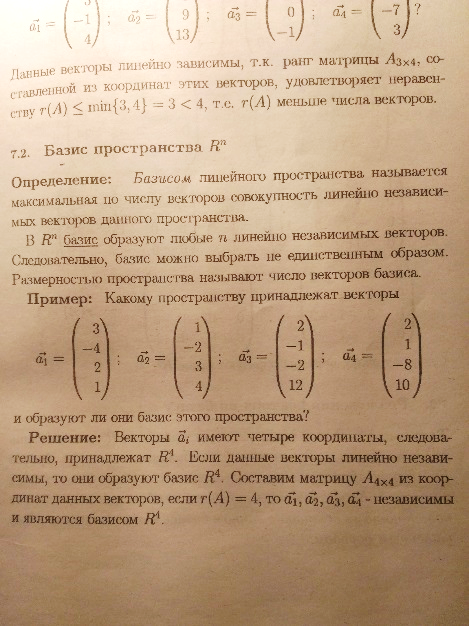
54. Базис линейного пространства. Примеры.
Базисом линейного пространства L называется система элементов принадлежащих L, удовлетворяющая двум условиям:
1) система линейно независима.
2) Любой элемент L линейно выражается через базисные (т.е. является линейной комбинацией элементов )
Базис в пространстве R в степени n (канонический базис). Примеры: Базисом в пространстве называются три некомпланарных вектора , взятые в определённом порядке. Эти векторы называются базисными.
55. Теорема о разложении вектора по базису.

56. Линейная оболочка векторов.
Линейная оболочка — это набор векторов, которые задают линейное подпространство. Строго говоря, линейная оболочка — это множество всех линейных комбинаций данных векторов. Так же обозначим особенности:
1) Если задана линейная оболочка — ранг набора векторов равен его размерности. С другой стороны в таком случае рангом или размерностью называют минимальное количество линейно независимых векторов в линейном подпространстве.
57. Векторное представление системы линейных уравнений.
Представим осн. матрицу А в виде в-р-столбцов А1 , А2,…, Ап.
Тогда система лин. ур-ний (6.1) записывается в векторном виде:
x1А1+х2А2+…+хnAn=b
А1=( ,
)A2=(
,
)A2=( ,….
An=(
,….
An=( ),b=(
),b=( )
)
Значит, сис. лин. ур-ний тхп мб представлена в виде разложения в-а b€Rm – в-ра свободных членов по n в-рам А1, А2, . . . , А п € R m – в-р-столбцам матрицы коэф., при этом коэф. разложения оказываются переменные.
58. Теорема Кронекера-Капелли.


59. Критерий линейной зависимости векторов в пространстве Rn.
Система векторов векторного пространства является линейно зависимой тогда и только тогда, когда один из векторов системы линейно выражается через другие вектора этой системы.
Доказательство.
Необходимость. Пусть система ![]() линейно
зависимая. Тогда, по определению, она
представляет нулевой вектор нетривиально,
т.е. существует нетривиальная
линейная комбинация
данной системы векторов равная нулевому
вектору:
линейно
зависимая. Тогда, по определению, она
представляет нулевой вектор нетривиально,
т.е. существует нетривиальная
линейная комбинация
данной системы векторов равная нулевому
вектору:
![]() ,
,
где
хотя бы один из коэффициентов этой
линейной комбинации не равен нулю.
Пусть ![]() ,
, ![]() .
.
Разделим
обе части предыдущего равенства на
этот ненулевой коэффициент (т.е. умножим
на ![]() :
:
![]() .
.
Обозначим: ![]() ,
где
,
где ![]() .
.
Тогда
![]()
или ![]()
т.е. один из векторов системы линейно выражается через другие векторы этой системы, ч.т.д.
Достаточность. Пусть один из векторов системы линейно выражается через другие вектора этой системы:
![]() .
.
Перенесем
вектор ![]() в
правую часть этого
равенства:
в
правую часть этого
равенства:
![]() .
.
Так
как коэффициент при векторе ![]() равен
равен ![]() ,
то мы имеем нетривиальное представление
нуля системой векторов
,
то мы имеем нетривиальное представление
нуля системой векторов ![]() ,
что означает, что эта система векторов
является линейно зависимой, ч.т.д.
,
что означает, что эта система векторов
является линейно зависимой, ч.т.д.
Теорема доказана.
Следствие.
1. Система векторов векторного пространства является линейно независимой тогда и только тогда, когда ни один из векторов системы линейно не выражается через другие вектора этой системы.
2. Система векторов, содержащая нулевой вектор или два равных вектора, является линейно зависимой.