

Який порядок розробки автоматизованих систем автоматизованої системи управління?
1.Розробка АСР починається з визначення величин технологічного об'єкта, які підлягають контролю та регулюванню. Крім того, необхідно визначити точки введення керуючих впливів і канали їх проходження по об'єкту. При розробці АСР вибирають один або кілька показників ефективності процесу, встановлюють необхідні обмеження, знаходять статичні та динамічні характеристики об'єкта регулювання. У результаті аналізу статичних характеристик оцінюють ступінь впливу одних величин на інші і виявляють регулюючі величини, які найістотніше впливають на процес. Вибираючи вимірювальні та проміжні перетворювачі, виходять з того, що номінальні або задане значення регульованої величини мають становити 50-70% його максимального значення. Важливим етапом при розробці системи регулювання є аналіз статичних зв'язків між вхідними та вихідними координатами. Мета такого аналізу - виявити статично незалежні керуючі впливи та регулюючі параметри
2. Вибір закону регулювання регулятора
3 Розрахунок настроювань регуляторів
Які основні напрями підвищення ефективності інженерної праці при проектуванні сучасних асу?
Таким чином, основними факторами підвищення ефективності від застосування АСК, які можна кількісно оцінити, є:
- підвищення продуктивності праці внаслідок скорочення затрат робочого часу і оп¬тимального завантаження робочого персоналу, а також раціональнішого використання засобів та технологічного обладнання;
- прискорення введення в експлуатацію об'єктів та збільшення потуж-ностей для випуску продукції;
- скорочення тривалості отримання готової продукції;
- забезпечення ритмічності роботи;
- скорочення затрат матеріальних та енергетичних ресурсів;
- підвищення якості продукції, та інші.
Які перспективи розвитку сучасних асу?
Сучасне виробництво - складна система, яка складається з багатьох підсистем: технічних, економічних, екологічних, соціальних та інших, і призначена для вирішення поставлених перед нею завдань. Елементи системи з'єднані між собою найрізноманіт¬нішими зв'зками. Для успішного керування такою системою потрібно знати основні закономірності і принципи її функціонування та тенденції розвитку.
Кожне сучасне виробництво характеризується двома тенденціями:
- намаганням спростити виробництво з метою його економічності, технологічності га ефективності (ця тенденція спостерігається і у природі: там, де це можливо, природа спростила явища і речі);
- необхідністю ускладнення виробництва, яке викликається прагненням освоювати нові види продукції, підвищувати її якість, використовувати досягнення науки і техні¬ки. Ускладнення виробництва, його внутрішніх та зовнішніх зв'язків неминуче викли¬кає необхідність ускладнення керування ним. Без якісного керування виробництво не може бути ефективним.
-
Яка методика розрахунку одноконтурних аср?
У npoцeci дослідження ОАСР кожну ланку структурної схеми описують передаточною функцією. При цьому об'єкт керування має дві вхідні координати: X та Z. Канал X У канал регулювання, a Z У - канал збурення. У paзi ступінчатої зміни вхідних координат X або Z на виході системи з'явиться сигнал, який змінюватиметься в чaci. Якщо дати збурення по каналу Z У, то вихідний сигнал У одержить відхилення від усталеного значення, яке з часом зникне (рис. 3.2, а). 3i зміною завдания и вихідний сигнал також одержить відхилення, яке набуде нового усталеного значення (рис. 3.2, 6).
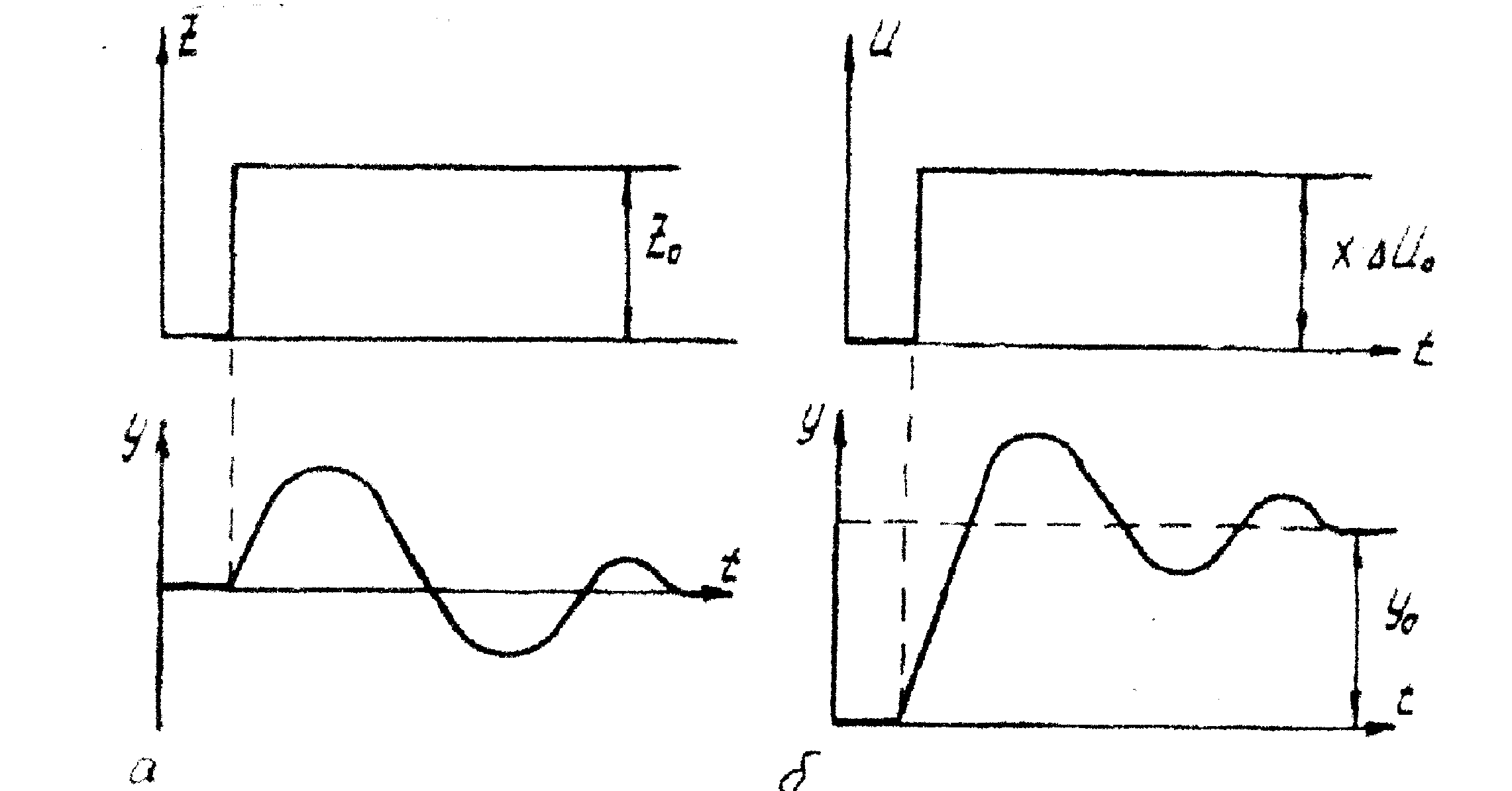
Рис. 3.2. Перехідні процеси АСР у paзi зміни впливів: а - збурюючого; б – задавального
Передаточні функції динамічних ланок позначимо так:
APW1(s), BMW2(s), OPW3(s), BПW4(s), ПП1W5(s), ПП2W6(s), а передаточну функцію каналу Z У позначимо Wz(s). Знайдемо передаточну функцш АСР по каналу регулювання и У.
Wр(s)= =
=
 .
/3.2/
.
/3.2/
Якщо об’єкт регулювання має чисте запізнення, то одержану передаточну функцію необхідно помножити на передаточну функцію ланки чистого запізнення W(s) = exp(-τ3 s),
де τ3 – час чистого запізнення.
для каналу збурення Z → Y
W3(s)= =
=
 .
.