

55.За якими каналами досліджуються комбіновані аср?
Комбіновані АСР
Комбіновані системи регулювання використовують при автоматизації об’єктів, на які діють істотні контролюючі збурення. Їх можна побудувати подаванням коректуючого сигналу на вхід як регулятора, так і виконавчого механізму (рис. 4.1).
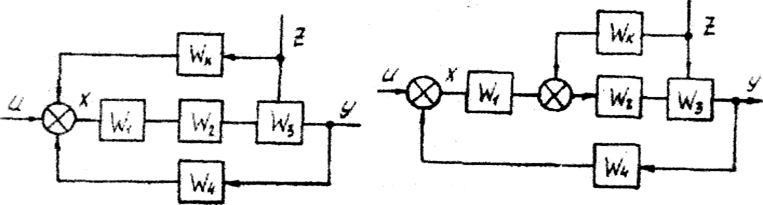
а б
Рис. 4.1. Структурні схеми комбінованої АСР у разі подавання коректуючого сигналу на вхід: а – регулятора; б – виконавчого механізму; Wк – передаточна функція компенсатора
Впровадження коректуючого імпульсу за найсильнішим збуренням дає істотне зниження динамічної помилки регулювання за умови правильного вибору та розрахунку динамічного пристрою, який формує закон зміни цього впливу.
Основою розрахунку подібних систем є принцип інваріантності. Суть цього принципу полягає в наступному: відхилення вихідної координати системи регулювання від заданого значення має тотожно дорівнювати нулю в разі будь-яких задавальних або збурюючих впливів. Для виконання принципу інваріантності необхідні дві умови: ідеальна компенсація всіх збурюючи впливів та ідеальне відтворення сигналу завдання. Очевидно, що досягти абсолютної інваріантності в реальних системах регулювання практично неможливо. Звичайно обмежуються частинною інваріантністю відносно найнебезпечніших впливів. Розглянемо умови інваріантності розімкненої комбінованої систем регулювання відносно одного збурюючого впливу.
Як правило, дослідження комбінованих АСР виконують за каналами збурення (Z → Y).
4.1.1 Умови інваріантності
Розглянемо умови інваріантності розімкненої системи (рис.4.2.): Y(t) = 0.

Рис. 4.2. Структурна схема розімкненої АСР
Вважаємо, що u = cоnst, а збурюючий сигнал Z діє на вихідну координату Y двома шляхами – по каналах Z →Y або Z →X→ Y . В операторній формі рівняння для вихідного сигналу має вигляд:
Y(s) = Z(s)[Wz(s)+W1(s)W2(s)W3(s)W4(s)5Wк(s)]=0 /4.1/
За наявності збурення Z(s) ¹ 0 умова інваріантності /4.1/ виконується, якщо:
Wz(s)+ W1(s)W2(s)W3(s)W4(s)Wк(s)=0
З /4.1/ можна знайти передаточну функцію, яку повинен мати компенсатор, щоб виконувалась умова інваріантності:
/4.2/
Таким чином, щоб забезпечити інваріантність системи регулювання відносно якого-небудь збурення необхідно встановити динамічний компенсатор, передаточна функція якого дорівнює відношенню передаточної функції об’єкта по каналу збурення до передаточної функції еквівалентного об’єкту, взятого з протилежним знаком.
Якщо компенсуючий сигнал надходить на вхід виконавчого механізму, то умова інваріантності набере вигляду
Wz(s)+W2(s)W3(s)W4(s)Wк(s)=0 /4.3/
Одержимо умови інваріантності для комбінованої АСР, якщо компенсуючий сигнал надходить на вхід регулятора (див. рис. 4.1, а). У цьому разі передаточна функція комбінованої системи регулювання по каналу Z →Y набере вигляду:
/4.4/
Умова інваріантності комбінованої системи полягає в тому, що чисельник передаточної функції має дорівнювати нулю. Таким чином, у разі ввімкнення виходу компенсатора на вхід регулятора передаточна функція компенсатора, одержана з умови інваріантності, залежатиме від характеристик не лише об’єкта, а й регулятора.