

2.5. Упражнения и контрольные вопросы к главе 2.
Постройте зависимость, выражающую моменты простейшей электрической машины (рис. 2-1) от времени при последовательном включении ее обмоток в сеть 50 Гц с амплитудой тока Im=0,5 A при dL/d=0,5 Гн/рад. Определите среднее значение момента.
Построить зависимость, аналогичную п.1 при L=Lm cos
Пользуясь результатами п.2 построить зависимость Мср=f().
Учитывая соотношение (2-18) и результаты п. 3, нарисовать согласно рис. 2-1 взаимное расположение обмоток ротора и статора при различных значениях среднего момента.
Перечислите основные типы электрических машин.
![]()
Глава 3. Асинхронные машины
3.1. Общие с сведения и электромеханическое преобразование энергии в асинхронных машинах
3.2. Асинхронные трехфазные двигатели
3.3. Асинхронные двухфазные управляемые двигатели
3.4. Упражнения и контрольные вопросы к главе 3.
![]()
3.1. Общие с сведения и электромеханическое преобразование энергии в асинхронных машинах
Как указывалось выше, асинхронной машиной называется машина переменного тока, у которой только первичная обмотка получает питание от электрической сети с постоянной частотой, а вторая обмотка замыкается накоротко или на электрическое сопротивление. Токи во вторичной обмотке появляются в результате электромагнитной индукции. Их частота ω зависит от угловой скорости вращения ротора ω.
Асинхронные машины используются в основном как двигатели, в качестве генераторов они применяются крайне редко. Наибольшее распространение получили трехфазные асинхронные двигатели с короткозамкнутым ротором, имеющие трехфазную обмотку на статоре и питающиеся от трехфазной сети. Трехфазный асинхронный двигатель является наиболее распространенным двигателем постоянного тока.
В системах автоматического управления используются двухфазные асинхронные двигатели с короткозамкнутым, чаще всего с немагнитным полым ротором.
В асинхронных машинах обмотки статора,
питающиеся переменным током частоты
![]() ,
создают магнитное поле, вращающееся с
частотой
,
создают магнитное поле, вращающееся с
частотой![]() ,
гдеp- количество пар
полюсов на статоре. Под действием
элекгромагнитной индукции в обмотках
или элементах короткозамкнутого ротора
("беличьей клетке")
,
гдеp- количество пар
полюсов на статоре. Под действием
элекгромагнитной индукции в обмотках
или элементах короткозамкнутого ротора
("беличьей клетке")
индуктируются вторичные ЭДС e2и токиi2частоты ω2, которые взаимодействуют с вращающимся магнитным полем, создается электромагнитный моментM, что приводит к вращению ротора с частотой ω1.
Скорость вращения ротора ω не может быть равной скорости вращения поля, так как при этом не будет индуцироваться вторичная ЭДС e2, что приведет к отсутствию вращающегося момента. Поэтому ротор в своем движении должен отставать от магнитного поля - проскальзывать - отсюда наименование двигателя - асинхронный, а один из основных параметров - скольжение:
Часто рассматривают так называемую однопериодную модель двигателя, в которой p=1, тогда

Скольжение является относительной величиной и в двигательном режиме изменяется в пределах 0<S≤1, причемS=0 соответствует синхронной работе, аS=1- пуску двигателя.
Частота индуцируемых во вторичной обмотке (роторе) ЭДС и токов зависит от скольжения
![]() .
.
Тогда эквивалентную схему цепи ротора
можно представить согласно .
.

Рис. 3-2а. Эквивалентная схема цепи ротора асинхронной машины.
В начальный момент пуска двигателя ротор неподвижен S=1, ω2= ω1, и в роторе индуцируется ЭДС, пропорциональная первичной частоте
![]() ;
;
![]() ;
;
![]()
В рабочем режиме ω2<ω1, так какS<1
![]()
![]()
Эквивалентная схема цепи ротора в
рабочем режиме показана на
 .
Она содержит изменяемый источник ЭДСEрп·Sи изменяемое индуктивное сопротивлениеxр=xрп·S.
.
Она содержит изменяемый источник ЭДСEрп·Sи изменяемое индуктивное сопротивлениеxр=xрп·S.
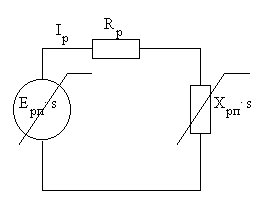
Рис. 3-2б. Эквивалентная схема цепи ротора асинхронной машины.
Пользуясь этой схемой можно вычислить ток ротора
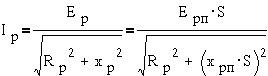
Разделив это выражение на S, получим
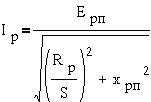
Пользуясь формулой (3-3) получим
эквивалентную схему цепи ротора,
приведенную к параметрам пускового
режима, то есть при неподвижном роторе
( ).
).
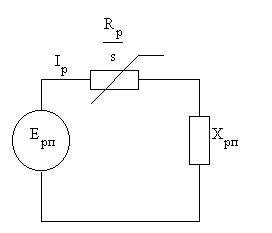
Рис. 3-2в. Эквивалентная схема цепи ротора асинхронной машины.
В этой схеме ЭДС ротора и его индуктивное сопротивление не изменяется при изменении скольжения (частоты вращения), а изменяется активное сопротивление, хотя физически происходит все наоборот - при изменении частоты вращения изменяется частота вторичной ЭДС f2и из-за этого меняется ее амплитуда и индуктивное сопротивление цепи ротора.
Приведя рабочий режим двигателя к режиму
неподвижного ротора, можем рассматривать
асинхронную машину как обычный
трансформатор с неподвижными обмотками,
схема которого показана на
 ,
гдеn- коэффициент
трансформации.
,
гдеn- коэффициент
трансформации.
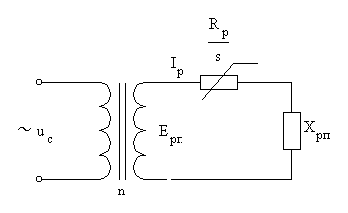
Рис. 3-3а. Эквивалентная электрическая схема асинхронного двигателя.
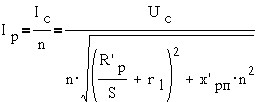
Приведя параметры вторичной цепи и
первичной, получим окончательную
эквивалентную схему асинхронного
двигателя, показанную на
 ,
,

Рис. 3-3б. Эквивалентная электрическая схема асинхронного двигателя.
где
 ;
; -
приведенные сопротивления, аr1-
активное сопротивление цепи ротора.
-
приведенные сопротивления, аr1-
активное сопротивление цепи ротора.
На основании этой схемы получим выражение для тока ротора
Выражение для вращающегося момента можем получить из энергетического уравнения M·ω1=M·ω+m1·Ip2·Rp, гдеm1- количество фаз.
Левая часть уравнения - электромагнитная мощность, а правая - механическая плюс электрическая мощности.
Из этого уравнения получим:
 .
.
Подставляя сюда выражения для тока
ротора
 и
учитывая, что
и
учитывая, что ,получим
аналитическое выражение для
электромагнитного момента:
,получим
аналитическое выражение для
электромагнитного момента:
График зависимости электромагнитного
момента от скольжения представлен на
 .
.
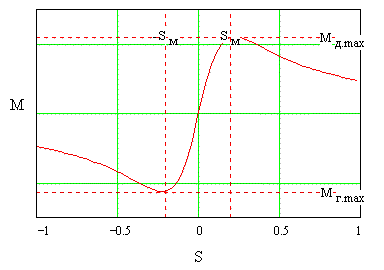
Рис. 3-4а. Зависимость электромагнитного момента от скольжения.
Правая часть графика относится к режиму двигателя, а левая - генератора. Скольжение, соответствующее максимальному моменту, называется критическим и обозначается SKилиSM. Выражение для момента двигателя может быть представлено через параметры критической точки
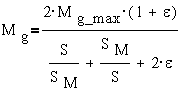
 ,
,
где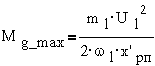 , а
, а .
.
При пренебрежении активным сопротивлением статора r1=0, ε=0, получим более простое выражение для момента
 .
.
Критическое скольжение за зависит от
соотношение активного и индуктивного
сопротивлений ротора. При r1=0 .
Вид характеристики при разных соотношениях
показан на
.
Вид характеристики при разных соотношениях
показан на .
.

Рис. 3-4б. Зависимость электромагнитного момента от скольжения.
Характеристика 1 соответствует случаю R`p<xрп, а характеристика 2 -R`p>xрп, т.е. в зависимости от величины активного сопротивления ротора критическое скольжение может быть как меньше, так и больше единицы. В трехфазных двигателяхSM<1, а в двухфазныхSM>1.
В ряде случаев в двухфазных и однофазных
асинхронных двигателях производится
питание несимметричным напряжением,
что приводит к появлению пульсирующего
магнитного поля. По принципу суперпозиции
несимметричную систему можно представить
в виде двух симметричных, но создающих
магнитные поля, вращающиеся в
противоположных направлениях, прямом
и обратном. Суммарный вращающий момент
будет равен алгебраической сумме двух
моментов - прямого и обратного, выражения
для которых аналогичны
 .
.
При пренебрежении активным сопротивлением статора это выражение будет иметь вид:

Характеристики при несимметричном
питании показаны на
 .
.

Рис. 3-5. Характеристики асинхронного двигателя при несимметричном питании.
а) Mmax_пр>Mmax_обр
б) Mmax_пр=Mmax_обр
На
 Mmax_пр>Mmax_обри существует пусковой моментMп,
который можно изменять, меняя несимметрию
питающих напряжений, как это делается
в управляемых асинхронных двухфазных
двигателях. На
Mmax_пр>Mmax_обри существует пусковой моментMп,
который можно изменять, меняя несимметрию
питающих напряжений, как это делается
в управляемых асинхронных двухфазных
двигателях. На Mmax_пр=Mmax_обри пусковой момент равен нулю, как это
бывает в однофазных двигателях. Но если
двухфазный двигатель с помощью
дополнительной обмотки, как это обычно
делается, то приS<1
появляется вращающий момент и двигатель
будет вращаться, находясь в рабочей
точкеSном,Mном.
Mmax_пр=Mmax_обри пусковой момент равен нулю, как это
бывает в однофазных двигателях. Но если
двухфазный двигатель с помощью
дополнительной обмотки, как это обычно
делается, то приS<1
появляется вращающий момент и двигатель
будет вращаться, находясь в рабочей
точкеSном,Mном.
![]()