

4.2. Специальные синхронные двигатели
Синхронные двигатели небольшой мощности применяются в системах автоматики. Поскольку в синхронных двигателях частота вращения жестко связана с частотой питания, такие двигатели применяются либо в системах, требующих строго постоянной частоты вращения, либо при частотном управлении скоростью.
К группе синхронных двигателей можно отнести также двигатели, частота питания которых зависит от частоты вращения - это так называемые вентильные двигатели. Но поскольку они имеют коммутатор и их характеристики похожи на характеристики двигателей постоянного тока, они будут рассмотрены в главе 5.
В цифровых системах автоматики находят широкое применение шаговые двигатели, в обмотки статора которых поступают импульсы тока и при поступлении каждого импульсов происходит поворот ротора на определенный угол - двигатель совершает шаг. В зависимости от особенностей возбуждения шаговые двигатели, как и другие типы синхронных двигателей, делятся на двигатели с активным ротором, представляющим собой явнополюсный ротор из постоянного магнита, и с реактивным ротором, представляющим собой явнополюсный или зубчатый ротор из магнитомягкого материала.
Рассмотрим более подробно принцип действия и характеристики шаговых двигателей.
Статор шаговых двигателей в отличие от синхронных микродвигателей непрерывного вращения имеет явновыраженные полюсы, на которых располагаются обмотки управления. Число пар полюсов каждой из обмоток управления pравно числу пар полюсов ротора.
Наибольшее развитие получили ШД активного типа - с ротором, содержащим многополюсный постоянный магнит.
Принцип действия такого ШД рассмотрим
на примере двухфазной двухполюсной
конструкции ( ).
).
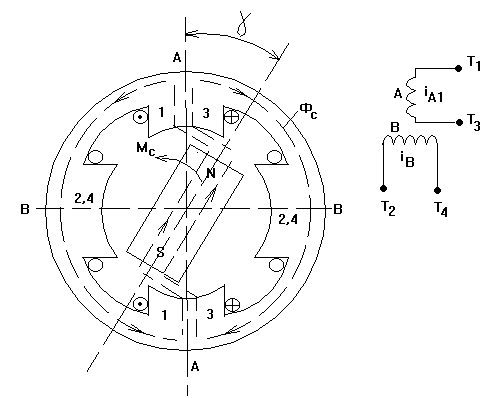
Рис. 4-3а. Схема шагового двигателя.
Этот двигатель имеет две взаимно
перпендикулярные обмотки А и В, в которые
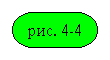
могут подаваться импульсы тока разной
полярности, как показано на
 .
.
Рис. 4-4. Временная диаграмма работы ШД.
Наличие тока в обмотке создает магнитный поток статора Ф0, который поворачивается при переключении обмоток на угол α. Вслед за потоком поворачивается и активный ротор, т.е. при каждом переключении двигатель делает шаг. Полный оборот потока совершается за m-тактный (в данном случае четырехтактный) цикл.
В общем случае для двигателя с активным ротором шаг двигателя
![]()
где p- число пар полюсов,m- число тактов управления.
Поворот ротора совершается под действием
так называемого синхронизирующего
момента, который возникает при отклонении
ротора от направления потока на угол
γ, как показано на
 .
.
Часто вводят понятие электрических углов, при которых многополюсных двигатель сводится к двухполюсной (однопериодной) модели. Для двигателей с активным ротором
![]() ;
;![]() .
.
Электрический угол γээквивалентен
внутреннему углу синхронной машины Θ
в формуле .
Тогда согласно
.
Тогда согласно в
ШД с активным ротором, где преобладает
магнитоэлектрический момент
в
ШД с активным ротором, где преобладает
магнитоэлектрический момент
![]() ,
,
где Mc_max- максимальный синхронизирующий момент,fсэиfрэ- электрические углы поворота МДС статора и оси ротора.
При переключении фазы происходит сдвиг
статической характеристики на угол αэ,
как показано на .
.
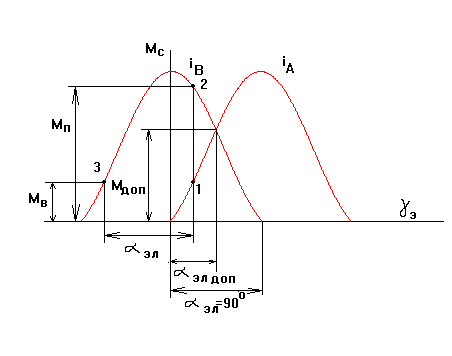
Рис. 4-3в. Статическая характеристика шагового двигателя.
Возникает пустой момент Mп,
под действием которого происходит
поворот ротора в согласованное с
магнитным потоком положение. Если
двигатель нагружен внешним магнитомMB, то
ротор переходит из точки 1 в точку 3 по
траектории 1-2-3. Для того, чтобы при
переключении обмотки происходил поворот
ротора, необходимо выполнение условияMП≥MB.
Отсюда существует допустимый внешний
моментMдопи
соответствующий ему допустимый угол
отклонения оси ротора от направления
потока γэ_доп, при которых
МП=МВ=МДОП. Чем больше
ШД имеет фазных обмоток и соответственно
тактов переключения, тем меньше у него
шаг γэи соответственно больше
МДОП. Поэтому обычно ШД являются
многофазными (от 3-х до 6-ти фаз). По этой
причине, как видно из
 ,
двухфазный ШД с пассивным ротором вообще
не работоспособен.
,
двухфазный ШД с пассивным ротором вообще
не работоспособен.
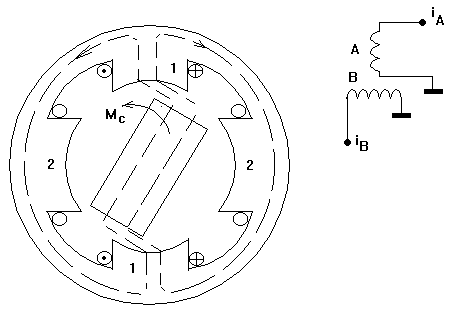
Рис. 4-3г. Схема шагового двигателя.
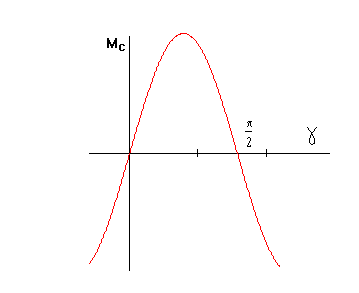
Рис. 4-3д. Статическая характеристика шагового двигателя.
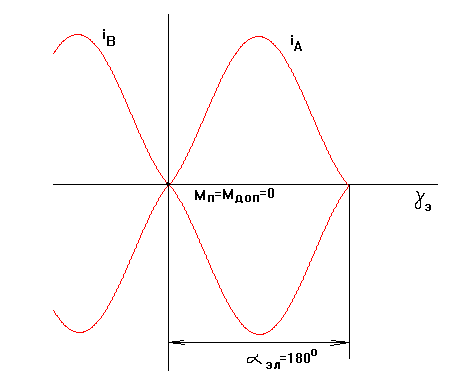
Рис. 4-3е. Статическая характеристика шагового двигателя.
Так, у него согласно
 вращающий
момент определяется реактивной
составляющей
вращающий
момент определяется реактивной
составляющей
![]()
и статическая характеристика имеет
вид, показанный на
 .
.
Отсюда соотношения для электрических и геометрических углов поворота ротора будут
![]() ;
;![]() ,
,
т.е. для двухфазного ШД p=1,α=90·град,
а αэ=180·град, сдвиг характеристики
при переключении фазы происходит на
180 градусов, как показано на и
ротор не поворачивается, так как пусковой
момент равен нулю.
и
ротор не поворачивается, так как пусковой
момент равен нулю.
Физически это можно объяснить тем обстоятельством, что при пассивном роторе направление синхронизирующего момента не зависит от направления потока. Момент равен нулю и в том случае, когда поток направлен вдоль полюсов и когда поперек полюсов, и достигает максимума, когда ось ротора располагается между полюсами статора, в отличие от активного ротора, в котором момент максимален, если поток направлен поперек ротора. Поэтому реактивные ШД должны иметь как минимум три обмотки и трехтактную систему коммутации.
Существуют различные режимы работы ШД:
статический режим,
режим отработки единичных шагов,
установившийся режим,
переходные режимы.
Статический режим соответствует
прохождению постоянного тока по обмоткам
управления, создавая неподвижное
магнитное поле. Основной характеристикой
этого режима является статическая
характеристика MC=f(γэ),
рассмотренная ранее (
 ).
).
Режим отработки единичных шагов
соответствует частоте управляющих
импульсов, при которой переходный
процесс, чаще всего колебательный, на
каждом шаге заканчивается к началу
следующего шага, т.е. угловая скорость
ротора f`рв
начале каждого шага равна нулю (см. ).
).
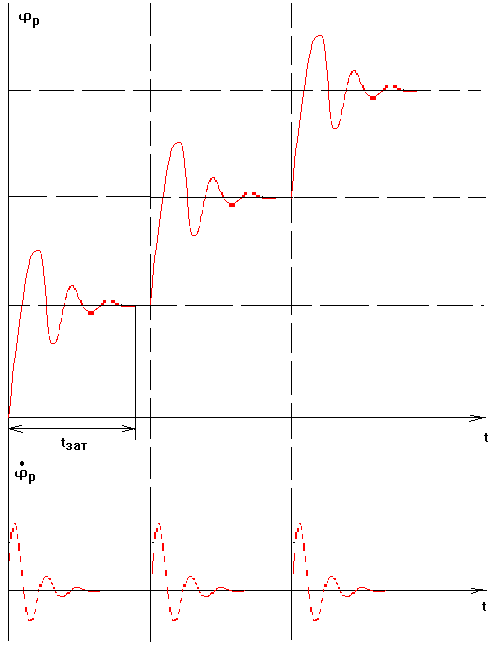
Рис. 4-5. Отработка единичных шагов.
Основными показателями этого режима являются: перерегулирование Δfп, максимальное значение мгновенной угловой скоростиf`p_max, время затухания свободных колебаний ротораtзат.
Если время электромагнитных переходных процессов значительно меньше, чем механических, движение ротора ненагруженного ШД можно описать следующим уравнением
![]()
 ,
,
где Mдин- динамический момент, Мдем- демпфирующий электромагнитный момент.
Динамический момент определяется моментом инерции ротора и ускорением:
Внутреннее электромагнитное демпфирование колебаний ротора происходит за счет поведения ЭДС вращения в обмотках управления. Значение демпфирующего момента пропорционально угловой скорости ротора:
 ,
,
где D- коэффициент демпфирования.
Если рассматривать работу ШД при малых
углах рассогласования осей ротора и
МДС статора (sin(γ)≈ γ), то,
подставив ,
, и
и в
в ,
получим дифференциальное уравнения
движения ротора:
,
получим дифференциальное уравнения
движения ротора:

В этом выражении коэффициент при fрэесть квадрат угловой частоты собственных колебаний ротора
 ,
,
а коэффициент при f`рэхарактеризует относительный коэффициент затухания колебаний λ:
![]()
 .
.
Установившийся режим работы ШД
соответствует постоянной частоте
управляющих импульсов f,
причем![]() .
В установившемся режиме вращение ротора
с некоторой средней угловой скоростью
ω сопровождается вынужденными колебаниями.
.
В установившемся режиме вращение ротора
с некоторой средней угловой скоростью
ω сопровождается вынужденными колебаниями.
Амплитуда колебаний достигает наибольшего значения при частоте управляющих импульсов, совпадающей с резонансной - собственной частотой ротора:

Важной характеристикой установившегося
режима является предельная механическая
характеристика, представляющая собой
зависимость допустимого момента
сопротивления от частоты управляющих
импульсов. Предельную механическую
характеристику рассматривают обычно
при f>f0( ).
).
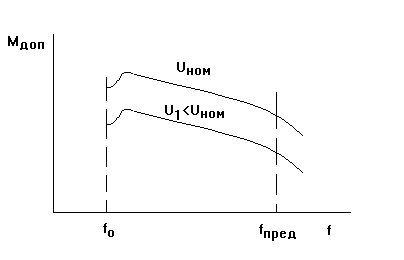
Рис. 4-6а. Предельные механические характеристики ШД.
Снижение MДОПпри увеличенииfобъясняется в основном наличием электромагнитной постоянной времениTуобмоток управления
 ,
,
где RуиLу- активное сопротивление и индуктивность обмоток управления. Последнее объясняется тем, что чем большеTу, тем меньше за время импульса нарастает ток, что снижает синхронизирующий момент. Снижение напряжения питания также уменьшаетMДОП.
Переходные процессы - пуск, торможение, реверс, переход с одной частоты на другую - сопровождаются переходными процессами в ШД.
Важным показателем переходного режима является приземистость ШД - наибольшая частота управляющих импульсов, отрабатываемая ШД для потери шага - частота приемистости fпр.
Приемистость растет с увеличением
синхронизирующего момента, а также с
уменьшением шага, момента инерции и
статического момента сопротивления
(см.
 ,
где МВ- внешний момент сопротивления
типа трения).
,
где МВ- внешний момент сопротивления
типа трения).
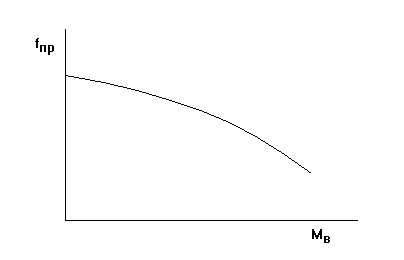
Рис. 4-6б. Предельные динамические характеристики ШД.
![]()