

1.7. Анализ простейшего электромеханического преобразователя.
Рассмотрим простейший магнитоэлектрический преобразователь, имеющий одну степень механической н электрической свободы, в качестве которого может быть приведен линейный исполнительный двигатель, применяемый в системе позиционирования в накопителях на жестких дисках СМ-ЭВМ.
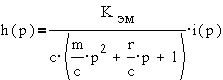
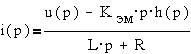
Его динамика описывается двумя уравнениями:
![]()
![]()
Модель такого преобразователя приведена
на
![]() и
и![]() .
.
Обозначив
![]() и
и![]() ,
получим эти уравнения в операторной
форме:
,
получим эти уравнения в операторной
форме:
![]()
![]()
Перейдя к изображениям, получим следующие уравнения:
По этим уравнениям можно получить
структурную схему согласно
 ,
по которой можно получить передаточную
функцию
,
по которой можно получить передаточную
функцию
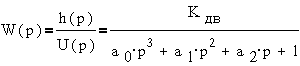
где
 ;
;![]() ;
;
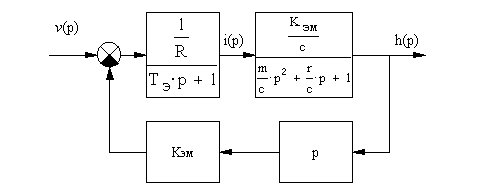
Рис. 1-8. Структурная схема электромеханического преобразователя.
Перейдя обратно во временную область, можно получить уравнение "вход-выход"
![]() ,
где
,
где![]()
Для перехода к уравнениям состояния представим уравнение вход-выход в скобочной форме
![]()
Введем новые координаты, соответствующие перемещенным в квадратных скобках и получим дифференциально-алгебраическую систему (слева) и ее преобразованную форму (справа)
|
|
|
|
|
|
|
|
|
|
|
|
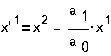
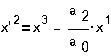
Этим уравнениям соответствует структура,
показанная на
 .
.
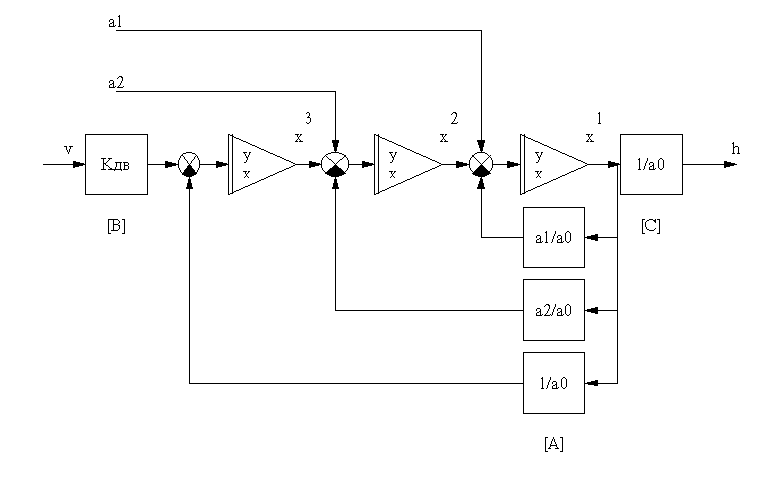 Рис.
1-9. Структурная схема преобразователя
в пространстве состояния.
Рис.
1-9. Структурная схема преобразователя
в пространстве состояния.
При переходе к уравнениям состояния получим x`=A·x+B·u;h=C·x+D·u,
где u=U; ;
;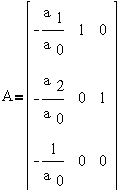 ;
; ;
;![]() ;D=0.
;D=0.
При достаточно малом периоде квантования Т по сравнению с инерционностью системы ее можно представить как дискретную (по времени) с дискретной передаточной функцией
![]()
Произведя необходимые преобразования, получим
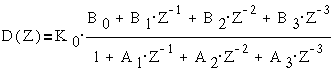
где
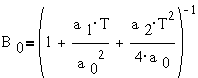 ;
; ;B1=B2=3·B0;B3=B0.
;B1=B2=3·B0;B3=B0.
Обозначим h`=h·K0-1.Тогда
из выражения![]() получим
разностное уравнение "вход-выход":
получим
разностное уравнение "вход-выход":
![]()
Этому уравнению соответствует структура
рекурсивного фильтра, представленная
на
 .
.
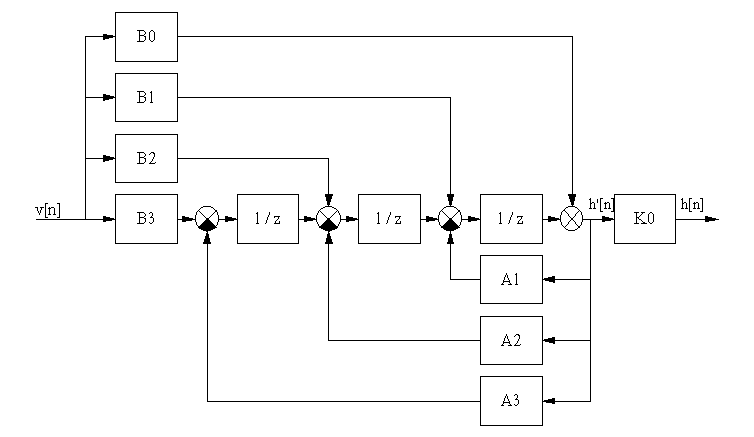
Рис. 1-10а. Структурная схема преобразователя в виде рекурсивного фильтра.
Используя, например, прямое программирование, можно моделировать систему на ЭВМ, вычисляя значения выходной величины h(n) по шагам. Скажем, переходную функцию при ступенчатом воздействии
U(n)=Uприn>0 (см. )
)
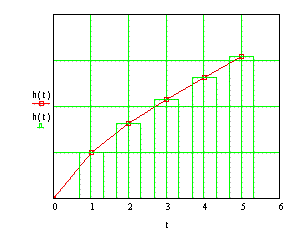
Рис. 1-10б. Выход преобразователя при ступенчатом воздействии.
![]()
![]()
![]()
![]()
и.т.д.
От разностного уравнения вход-выход можно перейти к уравнениям состояния и представить систему в виде дискретного автомата с памятью
![]() ;
;![]()
X(n) - вектор состояния автомата в данный дискретный момент времени,
X(n+1) - вектор состояния в следующий наблюдаемый момент через промежуток времени Т,
B- матрица входного преобразования,
A- матрица, реализующая функцию переходов,
C- матрица, соответствующая функции выходов.
Частотная характеристика системы

В этом случае, если характеристическое уравнение имеет вещественные отрицательные корни, получим

где T1·T2·T3=a0;T1·T2+T1·T3+T2·T3=a1;T1+T2+T3=a2, а корниα1=-T1-1;α2=-T2-1;α3=-T3-1.
Тогда амплитудная частотная характеристика
будет (см. )
)


Рис. 1-11. Частотная характеристика электромеханического преобразователя.
![]()
1.8. Упражнения и контрольные вопросы к главе 1.
Перечислите основные механические аналогии, дополнив колонки 1 и 2 таблицы 1-1 размерностями представленных в них физических величин.
Выведите уравнения динамики простейших механической и электромеханической систем из уравнений Лагранжа-Максвелла. Нарисуйте схемы, соответствующие этим уравнениям.
Перечислите основные типы электромеханических преобразователей и приведите примеры этих преобразователей.
Выведите передаточную функцию и нарисуйте структурную схему линейного двигателя без пружины и без трения.
По полученной в п.4 передаточной функции выведите выражение для частотной характеристики двигателя и постройте ее, задавшись численными значениями параметров двигателя (например, Тэ=10 мс, m=50 г, Кэм=0,05 Вс).
![]()