

1.4.2. Электродинамические преобразователи.
В магнитоэлектрической (электродинамической) системе усилие создается за счет изменения второй составляющей магнитной энергии Y(h)×i. То есть уравнения имеют следующий вид:
![]() ;
;
![]()
Электродинамический принцип преобразования энергии используется в электроизмерительных приборах, содержащих постоянный магнит, двигателях постоянного тока, тахогенераторах постоянного тока. В этих устройствах обобщенной характеристикой является угол поворота ротора fи уравнения имеют вид:
 ;
;
![]()
Обычно обозначают угловую частоту
вращения
![]() ,
тогда
,
тогда
![]() ;
;
![]()
Здесь
 -
момент сопротивления, вызванный
механической инерционностью системы
(I- момент инерции системы),
-
момент сопротивления, вызванный
механической инерционностью системы
(I- момент инерции системы),ρ·ω- момент вязкого сопротивления,
σ·f- момент упругого сопротивления,
 -
вращающий момент,
-
вращающий момент,Mc- статический момент сопротивления,
 -
ЭДС индукции (вращения),
-
ЭДС индукции (вращения), -
ЭДС самоиндукции,
-
ЭДС самоиндукции,R·i- падение напряжения на активном сопротивлении.
При применении преобразователя как исполнительного устройства (измерительного прибора) используется факт возникновения магнитоэлектрического вращающего момента, пропорционального току в цепи ротора. При применении его как датчика скорости используется возникновение в цепи ЭДС индукции, пропорциональной частоте вращения ротора. В этом случае электрическое уравнение преобразователя имеет вид :
![]()
И в установившемся режиме, когда
![]() ,
имеем
,
имеем![]() .
.
В частности, при повороте в магнитном
поле с индукцией Bрамки длиной 1 и радиусомrимеемdΨ=r·ω·B·1·r·df,
откуда![]() .
.
Основным достоинством электродинамических систем является линейность их характеристик.
![]()
1.4.3. Электростатические преобразователи.
В электростатических системах используется энергия электрического поля, запасенная в конденсаторе
![]() ;
;
![]()
В этом случае дифференциальные уравнения таковы:
![]() ;
;
![]()
Здесь
![]() -
тяговое усилие,S×q-
напряжение на конденсаторе
-
тяговое усилие,S×q-
напряжение на конденсаторе![]() .
.
Эти уравнения имеют меньше слагаемых, чем уравнения индукционных систем, поэтому электростатические преобразователи обладают меньшими возможностями и получили меньшее распространение.
Исполнительные устройства электростатического
типа очень маломощны, так как электрическое
поле в единице объема может сконцентрировать
гораздо меньше энергии, чем магнитное.
Поэтому тяговое усилие
![]() сравнительно
небольшое. Исполнительные устройства
такого типа применяются в основном как
измерительные и индикаторные.
сравнительно
небольшое. Исполнительные устройства
такого типа применяются в основном как
измерительные и индикаторные.
Возможности электростатического преобразователя как датчика, как видно из электрического уравнения, также ограничены, так как он не может индуцировать ЭДС и является, по существу, пассивным емкостным датчиком с уравнением вида:
![]()
Обозначив Uc- напряжение на конденсаторе, получим :
![]()
![]()
![]()
Пассивный емкостной преобразователь переменного тока.
![]()
1.5. Классификация электромеханических преобразователей
Электромеханические преобразователи,
применяемые в системах автоматики и
вычислительной технике, можно
классифицировать по назначению,
конструктивному исполнению и принципу
действия (см.
 ).
).
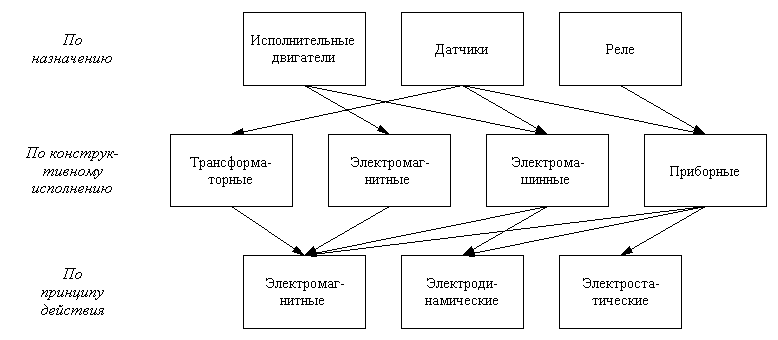 Рис.
1-5. Классификация электромеханических
преобразователей.
Рис.
1-5. Классификация электромеханических
преобразователей.
![]()
1.6. Представление электромеханических преобразователей как преобразователей сигналов (информации)
При применении электромеханических
преобразователей в системах автоматического
управления они рассматриваются не как
энергетические устройства, а как
информационные преобразователи сигналов
при их прохождении от входов к выходам
(см.
 ).
).
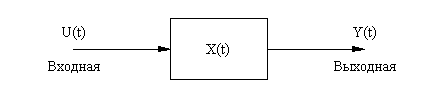
Рис. 1-6а. Функциональная схема динамической системы.
Если электромеханический преобразователь описывается исходными линейными или линеаризованными дифференциальными уравнениями, то от них можно перейти к дифференциальным уравнениям "вход-выход" вида
![]()
где y(t) иu(t) - векторы выходных и входных координат
![]() ;
;![]() -
полиномиальные матрицы,
-
полиномиальные матрицы,
![]() -
оператор дифференцирования по времени.
-
оператор дифференцирования по времени.
Перейти от исходных энергетических
уравнений к уравнениям "вход-выход"
удобно, используя структурные схемы и
передаточные функции. Типичная структурная
схема имеет вид, представленный на
 ,
гдеW(p) -
передаточные функции, аu(p),y(p),i(p)
- изображения входных, выходных и
внутренних переменных (p=c+j·ω).
,
гдеW(p) -
передаточные функции, аu(p),y(p),i(p)
- изображения входных, выходных и
внутренних переменных (p=c+j·ω).
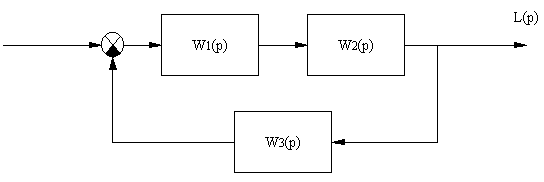
Рис. 1-6б. Структурная схема динамической системы.
Уравнение "вход-выход" получим в виде:
 ,
,
где
![]()
Структурная схема тесно связана с физикой работы преобразователя и поэтому легко может быть составлена по исходным энергетическим уравнениям, а уравнения "вход-выход" представляют более абстрактную модель системы.
Можно перейти к еще более абстрактной
модели - уравнениям состояния, когда
система представляется стандартной
структурой в виде автомата с памятью
( ).
).

Рис. 1-7а. Структурная схема динамической системы в виде непрерывного автомата.
![]() ;
;
![]() ,
,
где x- вектор состояния,A- матрица коэффициентов,B- матрица управления,C- матрица выхода,D- матрица обхода.
В этой структуре переменные состояния часто не являются физическими величинами, которые могут быть измерены в реальной системе.
Для моделирования электромеханической системы на ЭВМ или при управлении ею от ЭВМ удобно эту систему представить как дискретную по времени (импульсную), в которой ее переменные наблюдаются (вычисляются) через дискретные промежутки времени Т. При выборе Т достаточно малом по сравнению с инерционностью системы, дискретная модель достаточно точно описывает непрерывную систему.
Для анализа дискретной модели вводится аппарат дискретного преобразования Лапласа и дискретные передаточные функции D(Z), гдеZ- оператор запаздывания на интервал Т .
При достаточно малом Т можно принять
![]() .
.
Имея передаточную функцию системы W(P),
заменой![]() получимD(Z) в виде
получимD(Z) в виде
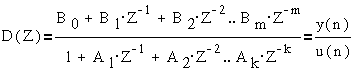 ,
,
где Z-1- запаздывание на один такт (время Т). Этой функции соответствует разностное уравнение "вход-выход"
![]()
Этой модели соответствует дискретный
рекурсивный фильтр вида
 ,
где А и В -полиномиальные матрицы, а Т -
матрица задержек тактов.
,
где А и В -полиномиальные матрицы, а Т -
матрица задержек тактов.
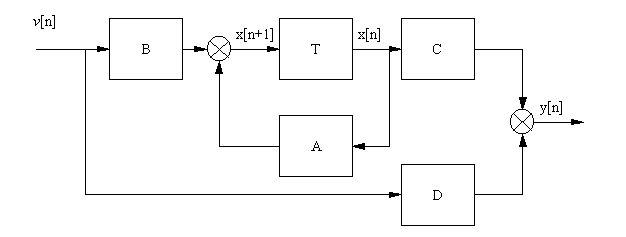
Рис. 1-7б. Структурная схема динамической системы в виде дискретного автомата.
По схеме рекурсивного фильтра может быть восстановлен алгоритм вычисления выходной величины y(n) в данном такте, знаяy(n-i) в предыдущие такты, и значения входного воздействияu(n) в данный такт иu(n-i) в предыдущие такты - прямое программирование. Применяются также последовательное и параллельное программирование, когдаD(Z) представляется в виде произведения или суммы более простых функций.
От разностных уравнений "вход-выход"
можно перейти к уравнениям пространства
состояний и представить систему в виде
дискретного автомата с памятью в виде
 .
.
![]() ;
;![]()
где x[n] - состояние в данный такт, x[n+1] - состояние в следующий такт.
Удобной моделью для анализа динамической системы является частотная характеристика
![]()
которая обычно представляется в виде двух характеристик, амплитудной A(ω) и фазовойf(ω).
![]()