

3.2. Асинхронные трехфазные двигатели
В асинхронном трехфазном двигателе вращающееся магнитное поле создается тремя обмотками статора, на которые подается трехфазное напряжение сети.
Схема трехфазного двигателя и временная
диаграмма питающего напряжения показаны
на
 .
.
|
|
|
|
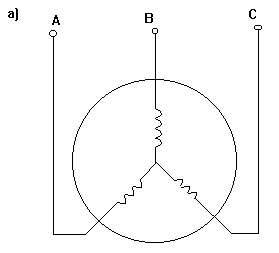
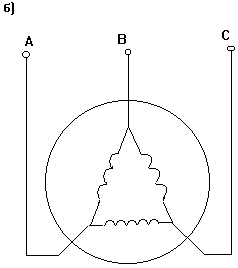
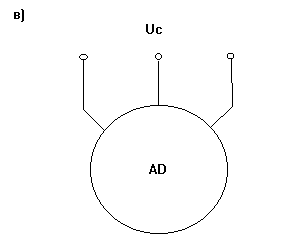
Рис. 3-6а,б,в. Схемы включения асинхронного двигателя.
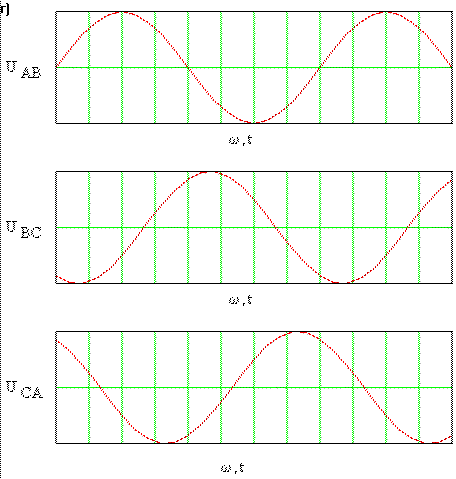
Рис. 3-6г. Временная диаграмма питающих напряжений асинхронного двигателя.
Для двигателей основной является
механическая характеристика ω=f(M),
то есть зависимость частоты вращения
от момента, которая для асинхронного
двигателя может быть получена на
основании выражения или
или с
учетом связи между скольжениемSи частотой вращения ω. Вид механической
характеристики показан на
с
учетом связи между скольжениемSи частотой вращения ω. Вид механической
характеристики показан на .
.
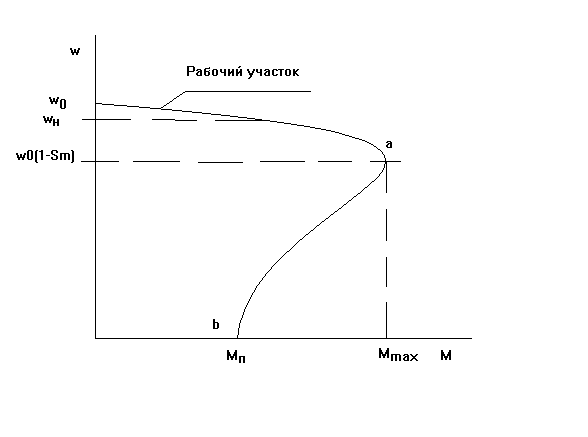
Рис. 3-7а. Механическая характеристика асинхронного трехфазного двигателя.
Ее можно разбить на два участка - рабочий
(0-а) при 0<S<SMи участок пуска (a-b) приSM<S<1.
Обычно в асинхронных трехфазных
двигателях с короткозамкнутым роторомSM=0.05..0.15,
т.е. характеристики достаточно жесткие
и рабочая частота вращения ωнблизка к синхронной ω0. Для таких
двигателей на рабочем участке т.е.
преобладает активная составляющая
сопротивления ротора. Тогда, пренебрегая
в формуле
т.е.
преобладает активная составляющая
сопротивления ротора. Тогда, пренебрегая
в формуле сопротивлениямиx´рп иr1по сравнению с
сопротивлениямиx´рп иr1по сравнению с![]() ,
получим упрощенное выражение для
рабочего участка механической
характеристики
,
получим упрощенное выражение для
рабочего участка механической
характеристики
откуда
 ,
,
где ω - частота вращения ротора, ω1-
частота вращения поля,Uc-
напряжение питания сети,R´p-
приведенное сопротивление ротора. Как
видно из выражения и
и ,
изменение напряжения питания мало
влияет на частоту вращения ротора на
рабочем участке и диапазон управления
напряжением весьма ограничен.
,
изменение напряжения питания мало
влияет на частоту вращения ротора на
рабочем участке и диапазон управления
напряжением весьма ограничен.
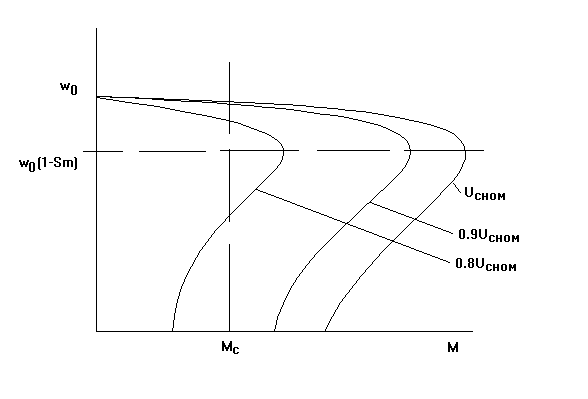
Рис. 3-7б. Механическая характеристика асинхронного трехфазного двигателя.
Несколько больший диапазон может быть
обеспечен двигателем повышенного
скольжения (SM≥1).
Однако в этом случае механические
характеристики имеют большую крутизну
( )
и устойчивая работа двигателя может
быть достигнута лишь при использовании
замкнутой системы, обеспечивающей
стабилизацию скорости. При изменении
статического момента система регулирования
поддерживает заданный уровень скорости
и происходит переход с одной механической
характеристики на другую, в итоге работа
протекает на характеристиках, показанных
на
)
и устойчивая работа двигателя может
быть достигнута лишь при использовании
замкнутой системы, обеспечивающей
стабилизацию скорости. При изменении
статического момента система регулирования
поддерживает заданный уровень скорости
и происходит переход с одной механической
характеристики на другую, в итоге работа
протекает на характеристиках, показанных
на штриховыми
линиями.
штриховыми
линиями.
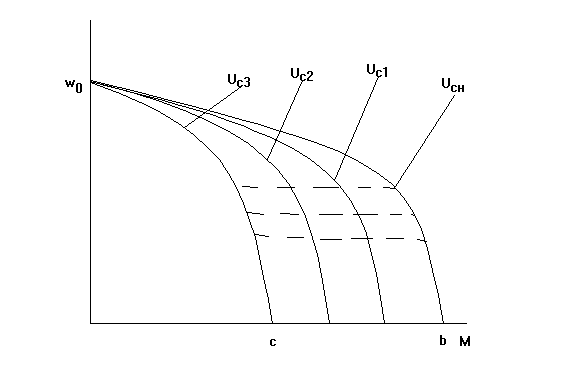
Рис. 3-7в. Механическая характеристика асинхронного трехфазного двигателя.
Плавное регулирование скорости в широких
пределах с сохранением достаточной
жесткости характеристик возможно только
при частотном управлении. Как видно из
формулы
 ,
изменяя частоту вращения поля ω1,
можно изменять частоту вращения ротора
ω за счет первого слагаемого формулы,
при этом желательно, чтобы второе
слагаемое не менялось, т.е. жесткость
характеристики при этом не изменялась.
Для этого одновременно с частотой,
изменяют напряжение питанияUcтак, чтобы их отношение оставалось
постоянным
,
изменяя частоту вращения поля ω1,
можно изменять частоту вращения ротора
ω за счет первого слагаемого формулы,
при этом желательно, чтобы второе
слагаемое не менялось, т.е. жесткость
характеристики при этом не изменялась.
Для этого одновременно с частотой,
изменяют напряжение питанияUcтак, чтобы их отношение оставалось
постоянным .
.
Тогда рабочий участок механической характеристики при частотном управлении можно приближенно представить формулой:
Такое управление называется пропорциональным частотным управлением.
Вид механических характеристик при
пропорциональном управлении показан
на
 .
.

Рис. 3-8а. Частотное управление асинхронным двигателем.
Функциональная схема частотного
управления представлена на
 .
Она состоит из управляемого выпрямителя
УВ, преобразующего сетевое напряжение
переменного тока частотой 50 Гц в
напряжение питания постоянного токаUп, величина которого
может регулироваться от устройства
управления УУ, и автономного инвертора
АИ, преобразующего напряжениеUпв трехфазное напряжение изменяемой
частотыf1. Управляющее
устройство, изменяя частотуf1вв зависимости от задания ωз,
изменяет также и напряжениеUптак, чтобы их отношение оставалось
постоянным. Система управления может
иметь обратную связь по скорости вращения
через тахогенератор ТГ.
.
Она состоит из управляемого выпрямителя
УВ, преобразующего сетевое напряжение
переменного тока частотой 50 Гц в
напряжение питания постоянного токаUп, величина которого
может регулироваться от устройства
управления УУ, и автономного инвертора
АИ, преобразующего напряжениеUпв трехфазное напряжение изменяемой
частотыf1. Управляющее
устройство, изменяя частотуf1вв зависимости от задания ωз,
изменяет также и напряжениеUптак, чтобы их отношение оставалось
постоянным. Система управления может
иметь обратную связь по скорости вращения
через тахогенератор ТГ.
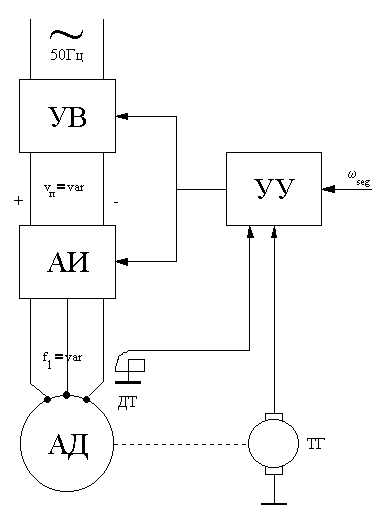
Рис. 3-8б. Функциональная схема частотного управления.
Более совершенным, чем пропорциональное
управление, является частотно-токовое
управление, при котором контролируется,
кроме частоты вращения, ток якоря от
датчика тока (ДТ), как показано на
 ,
что позволяет оставлять постоянным
поток при изменении частотыf1и нагрузки.
,
что позволяет оставлять постоянным
поток при изменении частотыf1и нагрузки.
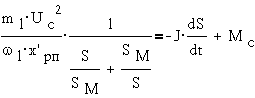
Как динамическая система асинхронный трехфазный двигатель описывается нелинейным дифференциальным уравнением первого порядка:
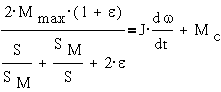 ,
,
где J- момент инерции ротора.
Учитывая, что ω=ω0·(1-S)
и![]() ,
и принимая ε=0, получим:
,
и принимая ε=0, получим:

Учитывая, что
 ,получим:
,получим:
Этому уравнению соответствует структурная
схема, представленная на
 .
.
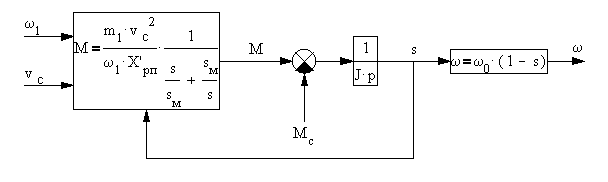
Рис. 3-9а. Структурная схема асинхронного трехфазного двигателя.
Интегрируя уравнение ( )
в пределах отS1доS, получим
)
в пределах отS1доS, получим
 ,
,
где
 -
электромеханическая постоянная времени.
-
электромеханическая постоянная времени.
Выражение ( )
позволяет построит кривые переходного
процессаS=f(t)
и соответственно ω=f(t),
вычисляя ряд значенийtпри неизменномS1и
изменяющемсяS. Кривые
разгона двигателя при различныхSMприведены на
)
позволяет построит кривые переходного
процессаS=f(t)
и соответственно ω=f(t),
вычисляя ряд значенийtпри неизменномS1и
изменяющемсяS. Кривые
разгона двигателя при различныхSMприведены на .
Как видно, длительность переходного
процесса существенно зависит отSMи при некотором значенииSM_оптминимальна. Двигатели повышенного
скольжения являются более быстродействующими,
так какSM_опт≈0.4..0.5.
.
Как видно, длительность переходного
процесса существенно зависит отSMи при некотором значенииSM_оптминимальна. Двигатели повышенного
скольжения являются более быстродействующими,
так какSM_опт≈0.4..0.5.
При пропорциональном частотном управлении для малых приращений двигатель можно описать линейными уравнениями (см. 3-1)

![]()
Этим уравнениям соответствует структурная
схема, представленная на
 .
.

Рис. 3-9в. Структурная схема асинхронного трехфазного двигателя.
На основании анализа этой схемы можно получить передаточную функцию двигателя при частотном управлении
 ,
,
где K- электромеханическая постоянная времени.
![]()