

Зв'язок між декартовими та полярними координатами
Пару полярних координат r та φ можна перевести в Декартові координати x та y шляхом застосування тригонометричних фукнцій синуса та косинуса:
x = r cosφ
y = r sin φ,
в той час як дві Декартові координати x та y можуть бути переведені в полярну координату r:
r2 = y2 + x2 (за теоремою Піфагора).
Для визначення кутової координати φ, слід взяти до уваги два такі міркування:
Для r = 0, φ може бути довільним дійсним числом.
Для r ≠ 0, аби отримати унікальне значення φ, слід обмежитись інтервалом в 2π. Зазвичай, обирають інтервал [0, 2π) або (−π, π].
Для обчислення φ в інтервалі [0, 2π), можна скористатись такими рівняннями (arctg позначає обернену функцію до тангенсу):
Тривимірне розширення
Полярна система координат поширюється в третій вимір двома системами: циліндричною та сферичною, обидві містять двовимірну полярну систему координат як підмножину. По суті, циліндрична система розширює полярну додаванням ще однієї координати відстані, а сферична — ще однієї кутової координати.
Ц иліндричні координати
Точка P накреслена в циліндричній системі координат.
Циліндрична система координат, грубо кажучи, розширює пласку полярну систему додаванням третьої лінійної координати, що має назву висоти і дорівнює висоті точки над нульовою площиною подібно до того, як Декартова система розширюється на випадок 3-х вимірів. Третя координата зазвичай позначається як z, утворюючи трійку координат (ρ, φ, z).
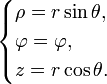
Трійку циліндричних координат можна перевести в Декартову систему такими перетвореннями:
x = ρ cosφ
y = ρ sinφ
z = z .
Сферичні координати
Т
 очка
накреслена в сферичній системі координат.
очка
накреслена в сферичній системі координат.
Також полярні координати можна розширити на випадок трьох вимірів шляхом додавання кутової координати θ, що дорівнює куту повертання від вертикальної вісі z (називається зенітом або широтою, значення знаходяться в інтервалі від 0 до 180°). Тобто, сферичні координати, це трійка (r, θ, φ), де r — відстань від центру координат, φ — кут від осі x (як і в пласких полярних координатах), θ — широта. Сферична система координат подібна до географічної системи координат для визначення місця на поверхні Землі, де початок координат збігається з центром Землі, широта δ є доповненням θ і дорівнює δ = 90° − θ, а довгота l обчислюється за формулою l = φ − 180°.
Трійку сферичних координат можна перевести в декартову систему такими перетвореннями:

Перехід до інших систем координат
Від сферичних до Декартових:
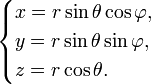
Від Декартових до сферичних:
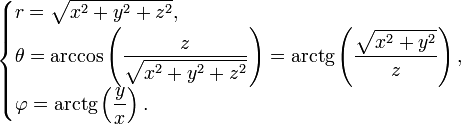
(тут, звісно,
потрібне уточнення для значень
![]() поза першим квадрантом; те ж саме для
всіх формул з арктангенсом
тут і нижче; однак, заміна на відповідну
формулу з арккосинусом
знімає це питання по відношення до
координати θ).
поза першим квадрантом; те ж саме для
всіх формул з арктангенсом
тут і нижче; однак, заміна на відповідну
формулу з арккосинусом
знімає це питання по відношення до
координати θ).
Модуль якобіана перетворення від декартових до сферичних координат:
| J | = r2sin θ.
Циліндрична система координат
Від сферичних до циліндричних:
Від циліндричних до сферичних:
Модуль якобіану перетворення від сферичних до циліндричних координат:
| J | = r.
Афінне перетворення
Афінне перетворення (лат. affinis, «пов'язаний з») - відображення називається афінним, якщо його можна отримати наступним способом:
Обрати «новий» базис простору з «новим» початком координат v;
Координатам x кожної точки простору поставити у відповідність нові координати f (x), які мають те саме положення в просторі відносно «нової» системи координат, яке координати x мали в «старій».
Перетворення, під час якого точці М ставиться у відповідність точка М’, при чому точка М належить одній системі координат, а точка М’ – новій (перетвореній) системі координат, але має в ній такі самі координати називається афінним перетворенням.