П. Кинематика
Тема 1. Плоское движение твердого тела
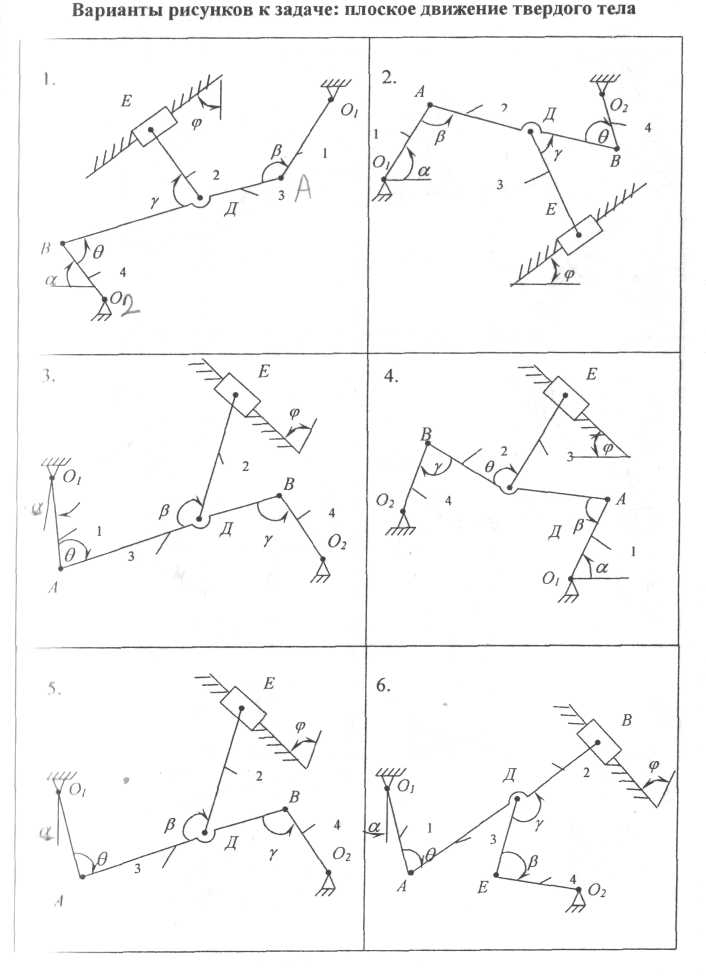
Плоский механизм состоит из стержней 1,2,3,4 и ползуна В, соединенных друг с другом и с неподвижными опорами О1 и О2 шарнирами; точка Д находится в середине стержня.
Положение механизма определяется углами а, β, γ, θ. Значения этих углов и других заданных величин по вариантам указаны в приложении . Определить величины, указанные в таблице в столбцах "найти".
Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы (по ходу часовой стрелки или против).
Построение чертежа начинать со стержня, направление которого определяется углом а; ползун с направляющими для большей наглядности изобразить так, как в примере. Заданную угловую скорость считать направленной против хода часовой стрелки.
При решении задачи для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела или понятием о многовекторном центре скоростей, применяя эту теорему или понятие к каждому звену механизма в отдельности.
Пример выполнения работы
Задача: Механизм (рис. 2.12) состоит из стержней 1,2,3,4 ползуна В, соединенных друг с другом и с неподвижными опорами шарнирами.
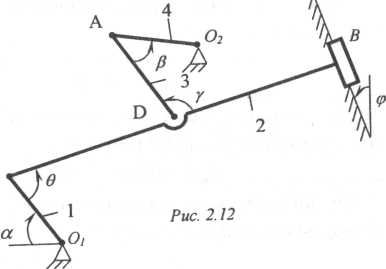
Дано: α=60°, β=150°, γ=90° AD=DB, I1=0,4м, I2=1,2м, I3=1,4м, ω1 = 4c-1 (ω1 - против хода часовой стрелки).
Определить:
VВ VЕ ω2
Решение:
1.Строим положение механизма в соответствии с заданными углами (рис. 2.13).
2..Определяем V в. Точка В принадлежит стержню АВ. Чтобы найти VB надо знать скорость какой-нибудь точки этого стержня и направление V в .
По данным задачи, учитывая направление ω1 можем определить VA: VA=ω1 l1=4* 0,4=1,6(м/с),
VA ┴O1 A . (2.27)
Н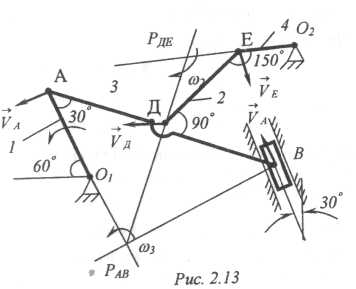 аправление
Vв
найдем,
учтя,
что точка В
принадлежит
одновременно
ползуну, движущемуся вдоль направляющих
поступательно.
Теперь, зная VAл
и
направление V
в, воспользуемся
теоремой о проекциях скоростей двух
точек тела (стержня АВ)
на
прямую, соединяющую эти
точки (прямая АВ).
аправление
Vв
найдем,
учтя,
что точка В
принадлежит
одновременно
ползуну, движущемуся вдоль направляющих
поступательно.
Теперь, зная VAл
и
направление V
в, воспользуемся
теоремой о проекциях скоростей двух
точек тела (стержня АВ)
на
прямую, соединяющую эти
точки (прямая АВ).
VB cos30° = VAcos60°=VB = 0,92m/c. (2.28)
3. Определяем VE. Точка Е принадлежит стержню ДЕ, следовательно, по аналогии с предыдущим, чтобы определить Ve , надо сначала найти скорость точки Д, принадлежащей одновременно стержню АВ. Для этого, зная V а и V в, строим мгновенный центр скоростей (МЦС) стержня АВ; это точка Рав, лежащая на пересечении перпендикуляров к V а и V в , восстановленных из точек А и В. Вектор Vд будет перпендикулярен отрезку Рав Д соединяющему точки Д и РАВ и направлен в строну поворота; величину VД найдем из пропорции:
VД / РавД = VВ / РавВ (2.29)
Чтобы вычислить РАВ Д и РАВ В, заметим, что ∆А РАВ В прямоугольный, т.к. острые углы в нем равны 30° и 60° и что РАВВ = AB sin 30 = 0,5 АВ = ВД.
Тогда ∆В РАИ Д является равносторонним и РавД = Р АВ В.
В результате равенство (2.29) дает:
VД=VB=0,2 м/с; V Д ┴ РАВД (2.30)
Так как точка Е принадлежит одновременно стержню О2 Е, вращающемуся вокруг О2, то Ve ┴O2E. Строим МЦС для стержня ДЕ, построив из точек Е и Д перпендикуляры к скоростям VД и Ve. .По направлению вектора VД определяем направление поворота стержня ДЕ вокруг центра Рде. Вектор Vе будет направлен в сторону этого поворота.
∟PДЕЕД = ∟PДЕДЕ=30° => PДЕЕ = РДЕ Е .
Составив теперь пропорцию, найдем:
VE / PДЕЕ =VД / PДЕ Д; VД = VЕ 0.92 м/с
4.Определяем ω2. так как МЦС стержня 2 нам известен (точка Рде) и
PДЕ Д= l2 / 2 cos 30°=0.69 м.
ω2 = VД / PДЕД = 0.92 / 0.69 =1.34 с-1 (2.32)
Ответ: VВ = 0,92 (м/с), VЕ = 0,92 (м/с), ω2. = 1,34с'.
Задание : Решить по 2 задачи по исходным данным и соответствующим рисункам.