

Министерство образования и науки Российской Федерации
МОУ ВПО Новосибирский Государственный Технический Университет
Лабораторная работа № 1 Элементарные звенья систем автоматического управления
Группа: АВТ-909 Студенты: Иванов Н.А. Дербенев Р.Ю.
Вариант 3 |
Преподаватель: Воевода А. А. Соловьев А. Л. |
Новосибирск, 2011
Цель работы: исследовать динамические характеристики, основные свойства типовых звеньев систем автоматического управления (САУ).
Параметры:
K = 4; T = 4; d = 0.1; μ = 0.5.
Ход работы:
Интегрирующее звено.
Дифференциальное уравнение:
 ,
,
где y – выходная координата звена, u – входное воздействие, K – коэффициент передачи.
Передаточная функция:
W(s)
=

при нулевых начальных условиях.
Передаточная функция в неявном виде, удобном для моделирования:

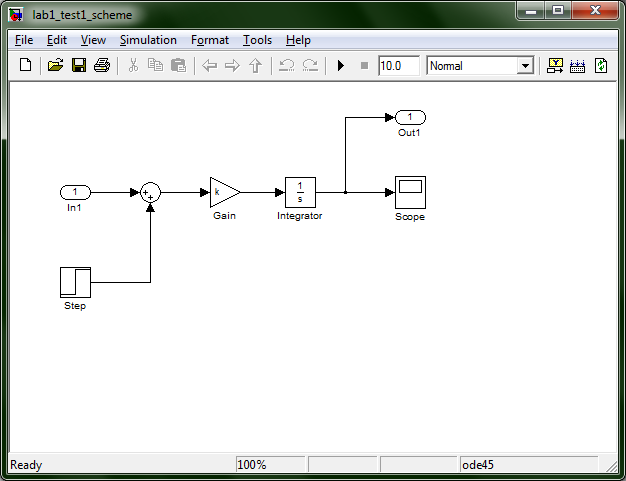
Схема звена
Входной сигнал поступает с генератора 1(t), а выходной сигнал поступает на осциллограф (на всех остальных схемах выполняется то же самое условие).
Характеристики звена и влияние параметров:
Для удобства различения характеристик при разных значениях параметров используется следующая цветовая кодировка: первый параметр – синяя кривая, второй – зеленая, третий – красная. На всех остальных схемах выполняется то же самое условие.
Переходная функция h(t) |
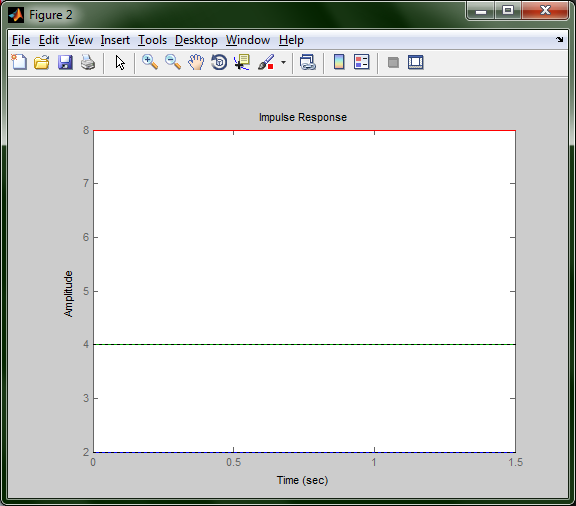
Импульсная переходная функция g(t) |
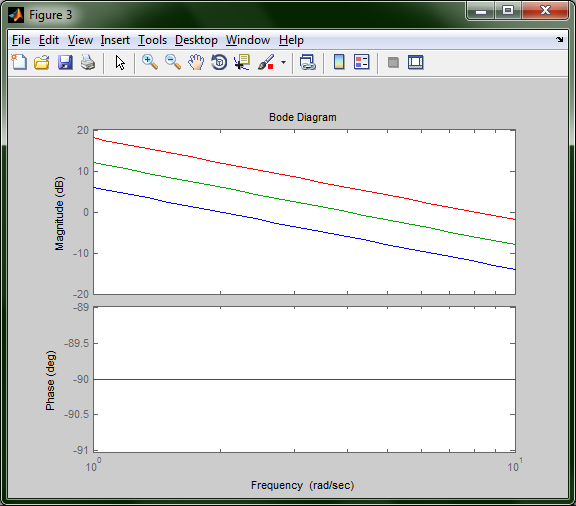
ЛАФХ и ФЧХ |
АЧХ |

Выводы:
С увеличением K амплитуда выходного сигнала с течением времени растет быстрее. g(t) – производная от h(t), а так как h(t) возрастает линейно, g(t) не меняется на всем интервале t и пропорциональна K.
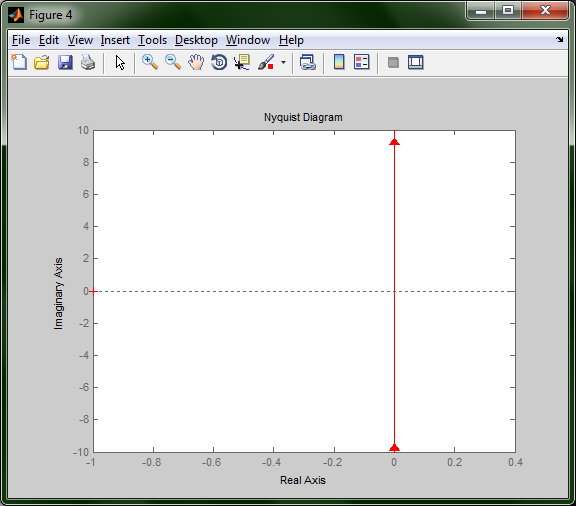
Изменение коэффициента K не влияет на АФХ.
L(ω) = 20 lg K – 20 lg ω. При изменении K меняется только константа lg K.
φ = arctg (Im W(jω) / Re W(jω)). Так как вещественная часть не меняется (равна 0), то φ = arctg (∞). Следовательно φ = – π/2 (так как стремление к нулю по мнимой оси идет от – ∞).
Программа для проведения исследования влияния параметра K:
% интегратор
for k=[2,4,8]
[A1,B1,C1,D1]=linmod('lab1_test1_scheme');
w=tf(ss(A1,B1,C1,D1));
figure(1), step(w) , hold on, % ПФ
figure(2), impulse(w), hold on, % ИПФ
figure(3), bode(w) , hold on, % ЛАЧХ и ФЧХ
figure(4), nyquist(w), hold on, % АФХ
end
figure(1), hold off, % ПФ
figure(2), hold off, % ИПФ
figure(3), hold off, % ЛАЧХ и ФЧХ
figure(4), hold off, % АФХ
Апериодическое звено.
Дифференциальное уравнение:
T + y
= k
u,
+ y
= k
u,
где y – выходная координата звена, u – входное воздействие, k – коэффициент передачи, T – постоянная времени.
Передаточная функция:

при нулевых начальных условиях.
Передаточная функция в неявном виде, удобном для моделирования:

Схема звена:

Характеристики звена и влияние параметров:
а) Влияние K. K = 2; 4; 8. T = 4
Переходная функция h(t) |
Импульсная переходная функция g(t) |
ЛАФХ и ФЧХ |
АЧХ |

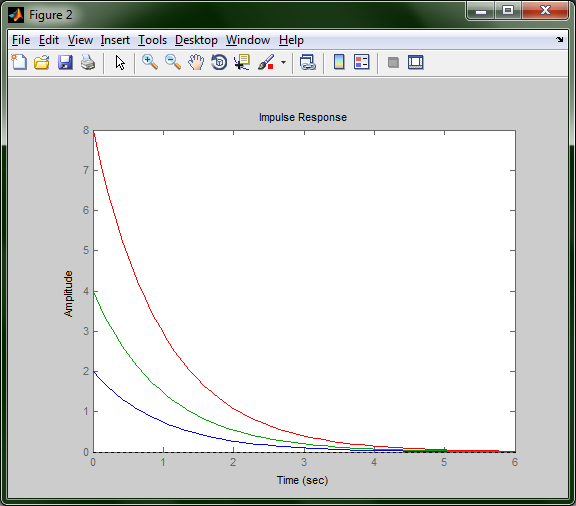
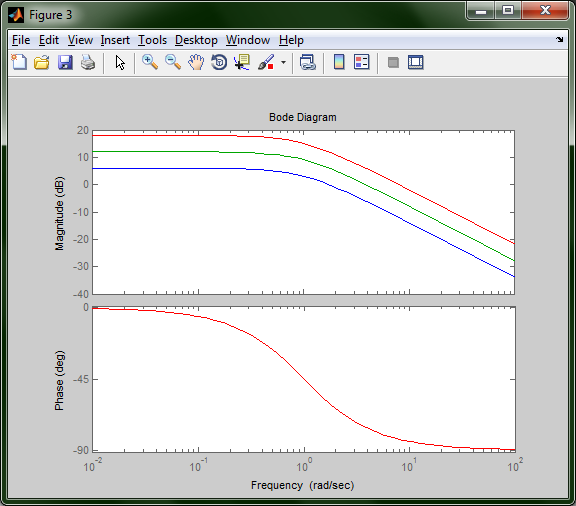
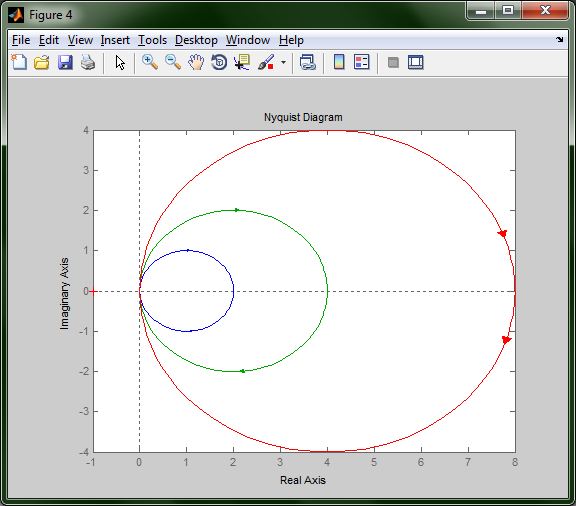
Выводы:
 .
Чем больше
K,
тем больше амплитуда выходного сигнала.
С увеличением K
растет скорость изменения h(t)
и g(t).
.
Чем больше
K,
тем больше амплитуда выходного сигнала.
С увеличением K
растет скорость изменения h(t)
и g(t).
 .
.
С увеличением K увеличивается только логарифм амплитуды выходного сигнала. Изменение фазы сигнала не зависит от K.
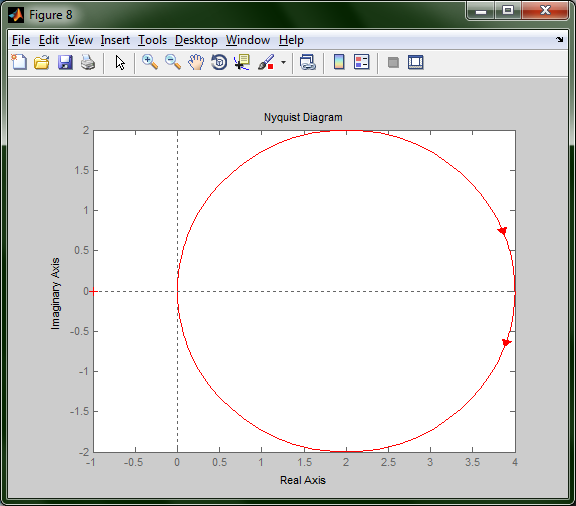
Примечание к годографу: нас интересует только нижняя полуокружность, образованная в результате изменения частоты ω от 0 до + ∞. Верхняя часть, образованная в результате изменения частоты ω от – ∞ до 0, смысла не имеет и, следовательно, нас не интересует.
б) Влияние T. T = 2; 4; 8. K = 4
Переходная функция h(t) |
Импульсная переходная функция g(t) |
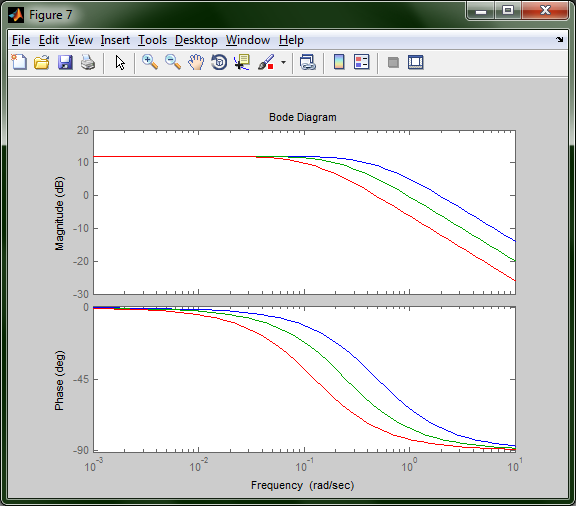
ЛАФХ и ФЧХ |
АЧХ |


Выводы:
С увеличением T уменьшается скорость изменения величин h(t) и g(t). Когда h(t) достигает амплитудного значения и далее не изменяется, величина g(t) достигает нуля и далее также не изменяется (производная константы равна нулю).
Кроме того, для ЛАЧХ точка перегиба аппроксимирующей ломаной линии (ω = Т-1; 20 lg K) смещается ближе к оси lg K. Для ФЧХ с увеличением ω и T возрастает смещение по фазе. Таким образом, параметр Т определяет инерционность схемы. Сигнал, проходящий через апериодическое звено будет искажаться тем сильнее, чем он больше содержит высокочастотных гармоник, а Т выше.
При изменении T амплитудно-фазовая характеристика не меняется.
Программа для проведения исследования влияния параметров:
%апериодическое звено
T = 1; %исследуем при различных k
for k=[2,4,8]
[A1,B1,C1,D1]=linmod('lab1_test2_scheme');
w=tf(ss(A1,B1,C1,D1));
figure(1), step(w) , hold on, % h(t)
figure(2), impulse(w), hold on, % g(t)
figure(3), bode(w) , hold on, % ЛАЧХ и ФЧХ
figure(4), nyquist(w), hold on, % АФХ
end
figure(1), hold off, % h(t)
figure(2), hold off, % g(t)
figure(3), hold off, % ЛАЧХ и ФЧХ
figure(4), hold off, % АФХ
k = 4; %исследуем при различных T
for T=[2,4,8]
[A1,B1,C1,D1]=linmod('lab1_test2_scheme');
w=tf(ss(A1,B1,C1,D1));
figure(5), step(w) , hold on, % h(t)
figure(6), impulse(w), hold on, % g(t)
figure(7), bode(w) , hold on, % ЛАЧХ и ФЧХ
figure(8), nyquist(w), hold on, % АФХ
end
figure(5), hold off, % h(t)
figure(6), hold off, % g(t)
figure(7), hold off, % ЛАЧХ и ФЧХ
figure(8), hold off, % АФХ