

2. Математическое описание линейных сау
2.1. Составление и линеаризация дифференциальных уравнений сау
Процессы, происходящие в САУ, в общем
случае описываются нелинейными
дифференциальными уравнениями, которые
могут быть решены лишь в отдельных
редких случаях. Однако для достаточно
большого числа систем эти уравнения с
приемлемой для р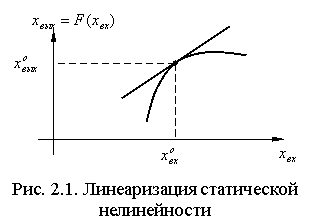 ешения
практических задач точностью могут
быть заменены линеаризованными.
ешения
практических задач точностью могут
быть заменены линеаризованными.
Рассмотрим принцип линеаризации на
примере системы, у которой входной![]() и выходной
и выходной
![]() сигналы
связаны нелинейной статической
зависимостью
сигналы
связаны нелинейной статической
зависимостью
![]() .
Пусть в установившемся режиме величина
входного сигнала равна
.
Пусть в установившемся режиме величина
входного сигнала равна
![]() и
его отклонения от этого значения в
переходных процессах достаточно малы.
и
его отклонения от этого значения в
переходных процессах достаточно малы.
Разложив нелинейную зависимость
![]() в
ряд Тейлора в окружности точки
установившегося режима и, отбросив
члены ряда выше первого порядка малости,
получим следующую приближенную
зависимость:
в
ряд Тейлора в окружности точки
установившегося режима и, отбросив
члены ряда выше первого порядка малости,
получим следующую приближенную
зависимость:
 ,
(2.1)
,
(2.1)
где
![]()
 -
значение производной функции
-
значение производной функции
![]() по
по![]() при
подстановке в выражение этой производной
значения
при
подстановке в выражение этой производной
значения
![]() =
=![]() .
.
Выражение (2.1) можно переписать в виде:
![]() ,
(2.2)
,
(2.2)
где
![]()
![]() ;
;
![]()
![]() ;
;
![]()
 .
.
Проведенная линеаризация имеет простую
графическую интерпретацию: она
соответствует (рис. 2.1) замене
действительной нелинейной характеристики
касательной к ней в точке, соответствующей
установившемуся режиму. Коэффициент
k в выражении
(2.2) равен тангенсу угла наклона этой
касательной относительно оси
![]() .
Поэтому его величина может быть найдена
простым графическим построением без
нахождения аналитического выражения
нелинейной зависимости
.
Поэтому его величина может быть найдена
простым графическим построением без
нахождения аналитического выражения
нелинейной зависимости
![]() и
ее производной.
и
ее производной.
В более общем случае, система описывается нелинейным дифференциальным уравнением, связывающим производные по времени входного и выходного сигналов:
 .
.
(2.3)
Разложив нелинейную функцию (2.3) в ряд Тейлора в точке установившегося движения, получим следующее линейное дифференциальное уравнение для приращения переменных:


 ….+
….+
 …
…
+…… …..
…..![]() ,
(2.4)
,
(2.4)
где

 ..,
..,
 и
т.д. – значения производных функции
(2.3) полученные при подстановке значений
входного и выходного сигналов,
соответствующих установившемуся режиму.
и
т.д. – значения производных функции
(2.3) полученные при подстановке значений
входного и выходного сигналов,
соответствующих установившемуся режиму.
Следовательно, процедура линеаризации нелинейных систем дает возможность описать их линейными дифференциальными уравнениями в отклонениях. Очевидно, что допустимость такой линеаризации ограничена требованием к незначительности отклонений сигналов от их установившихся значений. Кроме того, поскольку такая линеаризация основана на разложении в ряд Тейлора, она применима только к непрерывно дифференцируемым нелинейностям.
Нелинейные звенья и системы, не удовлетворяющие этому требованию, называются существенно нелинейными. К существенно нелинейным звеньям относятся звенья с прерывистыми характеристиками, например, звенья с релейными характеристиками или неоднозначными характеристиками типа петли гистерезиса.
2.2. Основные свойства преобразования Лапласа. Операторные уравнения сау. Передаточные функции линейных звеньев и систем
В общем случае дифференциальное уравнение, связывающее входной и выходной сигналы линеаризованной системы, имеет следующий вид:
![]()
(2.5)
Решение дифференциальных уравнений (2.3) – (2.4) зачастую связано со значительными трудностями, а во многих случаях, например в следящих системах, не может быть осуществлено, так как неизвестно управляющее воздействие. По этим причинам исследование систем ведется косвенными методами, например, базирующимися на операционном преобразовании Лапласа.
Приведем основные сведения о преобразовании Лапласа, которые будут использованы при рассмотрении систем, описываемых линейными дифференциальными уравнениями.
Преобразованием Лапласа называют интегральное преобразование:
 ,
(2.6)
,
(2.6)
определяющее
соответствие между функцией
![]() вещественного
переменного и функцией
вещественного
переменного и функцией
![]() комплексного
переменного
комплексного
переменного
![]() .
При этом
.
При этом
![]() называюторигиналом,
называюторигиналом,
а
![]() –изображением или изображением
по Лапласу. Символическая
запись такого преобразования:
–изображением или изображением
по Лапласу. Символическая
запись такого преобразования:
![]() =
=![]() ,
,
где
![]() –
оператор преобразования Лапласа.
–
оператор преобразования Лапласа.
Предполагается, что функция
![]() ,
которая подвергается преобразованию
Лапласа, обладает следующими свойствами:
,
которая подвергается преобразованию
Лапласа, обладает следующими свойствами:
![]() определена
и дифференцируема на всей положительной
числовой полуоси
определена
и дифференцируема на всей положительной
числовой полуоси
![]() ;
;
![]() =
0 при
=
0 при
![]() ;
;
существуют
такие числа Ми
![]() ,
что
,
что
![]() при
при
![]() .
.
Функции, обладающие указанными тремя свойствами, часто называют функциями-оригиналами.
Соотношение
 ,
(2.7)
,
(2.7)
определяющее по известному изображению
его оригинал (в точках непрерывности
последнего), называют обратным
преобразованием Лапласа. В нем
интеграл берется вдоль прямойRep =
![]() .
Символически обратное преобразование
Лапласа можно записать так:
.
Символически обратное преобразование
Лапласа можно записать так:
![]() =
=![]() ,
,
где
![]() –
символ обратного преобразования Лапласа.
–
символ обратного преобразования Лапласа.