

3.3. Частотные критерии устойчивости Михайлова и Найквиста
Частотные критерии устойчивости основываются на использовании принципа аргумента. Рассмотрим этот принцип, для чего характеристический полином замкнутой системы
![]() (3.13)
(3.13)
в соответствие с теоремой Безу представим в виде:
F(p)
=
![]() ,
(3.14)
,
(3.14)
где – piполюс передаточной
функции замкнутой системы (![]() ).
).
Поставляя в выражение (3.13) вместо pкомплексную переменнуюjω, получим:
![]() . (3.15)
. (3.15)
После аналогичной подстановки в выражение (3.14) получим:
F( jω) =
![]() .
(3.16)
.
(3.16)
Каждому сомножителю
![]() в
выражении (3.16) на комплексной плоскости
соответствует некоторый вектор, положение
которого меняется при измененииω.
в
выражении (3.16) на комплексной плоскости
соответствует некоторый вектор, положение
которого меняется при измененииω.
Определим изменение аргумента комплексной
функции F(jω)при изменении
частотыω от до
![]() .
Для этого необходимо определить изменение
аргумента каждого из векторов
.
Для этого необходимо определить изменение
аргумента каждого из векторов
![]() ,
поскольку
,
поскольку
|
|
|
|
|
|
![]() F(jω)= ∑∆arg(jω – pi).
F(jω)= ∑∆arg(jω – pi).
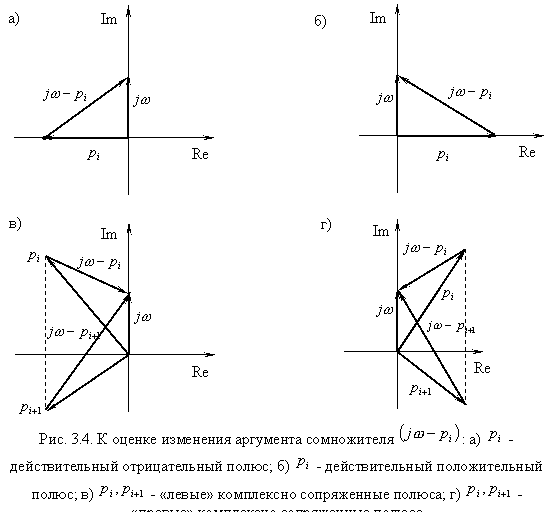
Если корень характеристического
уравнения pi действительный
и отрицательный, т.е. расположен на
действительной оси слева от начала
координат (рис. 3.4, а), то вектор
![]() поворачивается
против часовой стрелки на угол π/2,если этот корень действительный и
положительный (рис. 3.4, б), то вектор
поворачивается по часовой стрелке на
угол π/2. Следовательно, для левого
действительного полюса
поворачивается
против часовой стрелки на угол π/2,если этот корень действительный и
положительный (рис. 3.4, б), то вектор
поворачивается по часовой стрелке на
угол π/2. Следовательно, для левого
действительного полюса
![]()
![]() =
π/2,
=
π/2,
а для правого действительного полюса
![]()
![]() =
– π/2,
=
– π/2,
Нетрудно показать, что для пары коплексно сопряженных левых полюсов (рис. 3.4, в) изменение аргумента составляет +π, а для пары коплексно сопряженных правых полюсов (рис. 3.4, г) равно -π.
Если среди nполюсов передаточной функции замкнутой системыmрасположены справа от мнимой оси, а остальные (n – m) – слева, то изменение аргумента комплексной функцииF(jω)вектора равно:
![]() F(jω)= (n – m)∙ π/2 –m∙π/2 = (n –
2m)∙π/2.
(3.17)
F(jω)= (n – m)∙ π/2 –m∙π/2 = (n –
2m)∙π/2.
(3.17)
Выражение (3.17) и определяет суть принципа аргумента. В передаточной функции устойчивой системы правые полюса отсутствуют, т.е. m = 0,и изменение аргументаF(jω)равно:
![]() F(jω)=n∙π/2. (3.18)
F(jω)=n∙π/2. (3.18)
Из выражения (3.18) следует критерий устойчивости Михайлова, согласно которому изменение аргумента комплексной функцииF(jω)определяется по годографу, который записывают в виде
F(jω)=Х(ω) + jY(ω) ,
где Х(ω),Y(ω) – действительная и мнимая составляющие комплексной функцииF(jω);
Х(ω) = a0 – a2ω2 + a4ω4 – a6ω6 + ……;
Y(ω) = a1ω – a3ω3 + a5ω5 – a7ω7 + …….
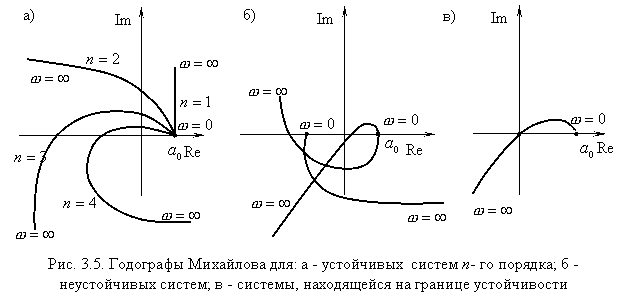 Каждому
значениюω = ωi на комплексной
плоскости соответствует точка с
координатами (Х(ωi),Y(ωi)
). При измененииω эта точка
описывает на плоскости некоторую
траекторию, которая называетсягодографом
Михайлова(рис. 3.5).
Каждому
значениюω = ωi на комплексной
плоскости соответствует точка с
координатами (Х(ωi),Y(ωi)
). При измененииω эта точка
описывает на плоскости некоторую
траекторию, которая называетсягодографом
Михайлова(рис. 3.5).
При ω =0Х(0) =a0, Y(0)= 0, т.е.F(0) = a0, причем в соответствии с выражением (3.6)a0 > 0.
Формулировка критерия Михайлова:
замкнутая система устойчива, если
годографF(jω), начинаясь приω =0 на положительной действительной
полуоси, при измененииω от 0 до
![]() обходит
последовательно в положительном
направлении (против часовой стрелки)nквадрантов, гдеn– порядок системы.
обходит
последовательно в положительном
направлении (против часовой стрелки)nквадрантов, гдеn– порядок системы.
Только в этом случае выполняется условие (3.18). На рис. 3.5, а,б, приведены примеры годографов для устойчивых и неустойчивых систем. Если годограф проходит через начало координат (рис.3.5, в), то система находится на границе устойчивости.
Из формулировки критерия следует, что система устойчива, если годограф Михайлова, начавшись на действительной оси при ω =0, несколько раз последовательно пересекает действительную и мнимую ось. Значенияω, при которых происходят эти пересечения, являются корнями уравненияY(ω)= 0 (при пересечении с действительной осью) и уравненияХ(ω) = 0 (при пересечении с мнимой осью). Следовательно, оценить устойчивость системы можно и без построения годографа: достаточно, чтобы корни указанных уравнений чередовались друг с другом.
На практике более широкое применение, по сравнению с критерием Михайлова, нашел частотный критерий Найквиста, который позволяет судить об устойчивости замкнутой системы по частотным характеристикам этой системы в разомкнутом состоянии.
Рассмотрим замкнутую систему с единичной обратной связью. Первоначально будем
полагать, что соответствующая ей разомкнутая система устойчива. Пусть передаточная функция этой системы в разомкнутом состоянии
W(p)
=
![]()
имеет n-й порядок, т.е. число ее полюсов (порядок полиномаA(р)) равноn. На основании принципа физической реализуемости можно утверждать, что число нулей передаточной функцииW(p) (порядок полиномаВ(р)) не превышает n. Передаточная функция системы в замкнутом состоянии:
Ф(р) =![]() =
=![]() .
.
Введем в рассмотрение выражение:
D(p)
=1 +W(p)
=
![]() . (3.19)
. (3.19)
Очевидно, что число нулей и полюсов выражения D(p)одинаково и равноn. При этом числитель выражения (3.19) является характеристическим полиномом замкнутой системы, а знаменатель – характеристическим полиномом разомкнутой системы. Осуществим в выражении (3.19) заменуpнаjω:
D(jω) =![]() (3.18)
(3.18)
и определим изменение аргумента (3.20), полагая, что замкнутая система устойчива. Поскольку в этом случае в соответствии с принципом аргумента
![]() В(jω)=n∙π/2
и
В(jω)=n∙π/2
и
![]() (А(jω)
+ В(jω))=n∙π/2,
(А(jω)
+ В(jω))=n∙π/2,
то
![]() D(jω)
=
D(jω)
=
![]() (А(jω)
+ В(jω)) –
(А(jω)
+ В(jω)) –
![]() В(jω)
=0.
В(jω)
=0.
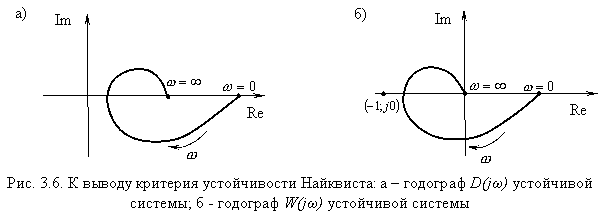
Таким образом, если разомкнутая и замкнутая системы устойчивы, то изменение аргумента D(jω) равно нулю, следовательно, годографD(jω) не охватывает начала координат (рис. 3.6, а).
 В
противном случае, когда годограф
охватывает начало координат, изменение
его аргумента не равно нулю и система
в замкнутом состоянии неустойчива.
В
противном случае, когда годограф
охватывает начало координат, изменение
его аргумента не равно нулю и система
в замкнутом состоянии неустойчива.
Очевидно, что об изменении аргумента вектора удобнее судить не по годографу D(jω) , а по годографу амплитудно-фазовой характеристики разомкнутой системыW(jω).ПосколькуD(jω) = 1 +W(jω), изменение аргументаD(jω) будет равно нулю, если годограф амплитудно-фазовой характеристики разомкнутой системы не охватывает точку с координатами (-1, j0) (рис. 3.6, б).
Отсюда следует формулировка критерия Найквиста: система, устойчивая в разомкнутом состояние, будет устойчива и в замкнутом состоянии, если годограф амплитудно-фазовой характеристики разомкнутой системы не охватывает точку с координатами (-1, j0). В том случае, когда годограф частотной характеристики охватывает эту точку, система неустойчива.
Е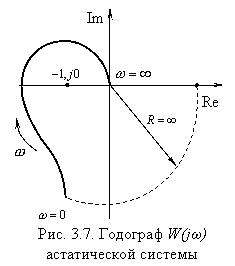 сли
САУ содержит ν интегрирующих звеньев,
то начальное значение фазочастотной
характеристики разомкнутой системы
равно (-ν∙π/2), а амплитудно-частотной –
бесконечности. Поэтому,
сли
САУ содержит ν интегрирующих звеньев,
то начальное значение фазочастотной
характеристики разомкнутой системы
равно (-ν∙π/2), а амплитудно-частотной –
бесконечности. Поэтому,
если ν=1, характеристикаW(jω)приω →0 уходит в бесконечность вдоль отрицательной мнимой полуоси;
если ν= 2 – вдоль отрицательной действительной полуоси;
если ν = 3 – вдоль положительной мнимой полуоси.
Для удобства оценки устойчивости таких астатических систем годограф W(jω)дополняют дугой бесконечного радиуса, начинающейся на положительной действительной полуоси и проводимой до пересечения с годографомW(jω)(рис. 3.7). Формулировка критерия устойчивости при этом не изменяется.
Если годограф W(jω) разомкнутой системы проходят через точку (1, j0), то система в замкнутом состоянии находится на границе устойчивости.
Рассмотрим случай, когда система в разомкнутом состоянии неустойчива и имеет m правых полюсов. Полагая, что при замыкании обратной связи система становится устойчивой, в соответствии с принципом аргумента получаем:
![]() В(jω)= (n –2m)∙π/2
и
В(jω)= (n –2m)∙π/2
и
![]() (А(jω)
+ В(jω))=n∙π/2,
(А(jω)
+ В(jω))=n∙π/2,
При этом изменение аргумента D(jω)равно:
![]() D(jω)
=
D(jω)
=
![]() (А(jω)
+ В(jω)) –
(А(jω)
+ В(jω)) –
![]() В(jω)
=n∙π/2 – (n –2m)∙π/2
=m∙π = 2π∙m/2.
В(jω)
=n∙π/2 – (n –2m)∙π/2
=m∙π = 2π∙m/2.
Следовательно, система в замкнутом состоянии будет устойчивой, если годограф частотной характеристики D(jω) m/2 раз охватывает начало координат, а соответственно годограф амплитудно-фазовой характеристики разомкнутой системы W(jω) m/2 раз охватывает точку с координатами (-1,j0), гдеm – число правых полюсов разомкнутой системы.
Годограф амплитудно-фазовой характеристикиW(jω) реальной технической системы может иметь достаточно сложную форму (рис. 3.8).
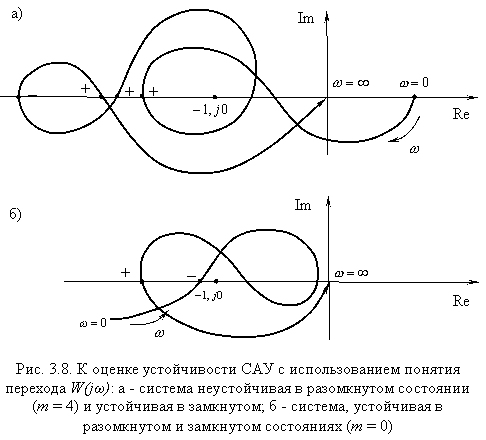 В
этом случае сложно определить,
сколько раз годографW(jω) охватывает
начало координат. Задача упрощается,
если ввести в рассмотрение понятиеперехода годографаW(jω)
через действительную ось, т.е.
пересечение графикомW(jω)
действительной оси левее точки с
координатами (-1,j0). Перехода
годографаW(jω)через действительную
ось считается положительным, если при
увеличении частотыω пересечение
оси происходит сверху вниз (годограф
переходит из второго квадранта в третий),
в противном случае переход считается
отрицательным.
В
этом случае сложно определить,
сколько раз годографW(jω) охватывает
начало координат. Задача упрощается,
если ввести в рассмотрение понятиеперехода годографаW(jω)
через действительную ось, т.е.
пересечение графикомW(jω)
действительной оси левее точки с
координатами (-1,j0). Перехода
годографаW(jω)через действительную
ось считается положительным, если при
увеличении частотыω пересечение
оси происходит сверху вниз (годограф
переходит из второго квадранта в третий),
в противном случае переход считается
отрицательным.
Обозначим число положительных переходов m+ , а число отрицательных переходов m- . Тогда критерий устойчивости Найквиста может быть сформулирован так: система в замкнутом состоянии становится устойчивой, если разность между числом положительных и отрицательных переходов равнаm/2, т.е.
m+ – m- = m/2, (3.21)
где m – число правых полюсов разомкнутой системы.
Если система в разомкнутом состоянии устойчива (m = 0) условие устойчивости системы при ее замыкании упрощается:
m+ – m- = 0. (3.22)