

Зависимость колебательности от значений hи h1
|
М
|
h
|
h1 | |||
|
ЛАХ типа А |
ЛАХ типа B |
ЛАХ типа C |
ЛАХ типа D | ||
|
1,1 |
21,00 |
5,5 |
2,05 |
5,5 |
1,9 |
|
1,3 |
7,70 |
8,9 |
3,85 |
8,9 |
2,8 |
|
1,5 |
7,00 |
12,75 |
4,8 |
12,5 |
3,6 |
|
2,0 |
3,00 |
28,0 |
10,0 |
26,6 |
6,1 |
|
2,.5 |
2,33 |
42,0 |
14,1 |
40,0 |
7,2 |
Построение лах в высокочастотном диапазоне
|
|
|
|
|
|
Вид желаемой ЛАХ в
высокочастотном диапазоне определяет,
например, такой показатель, как
помехоустойчивость системы, но на
качество регулирования поведение
![]() в
этой частотной области вид ЛАХ влияет
в незначительной степени. Поэтому на
участке высоких частот с целью упрощения
корректирующего звена допустимо
совпадение
наклонов асимптот желаемой ЛАХ и ЛАХ
исходной нескорректированной системы.
в
этой частотной области вид ЛАХ влияет
в незначительной степени. Поэтому на
участке высоких частот с целью упрощения
корректирующего звена допустимо
совпадение
наклонов асимптот желаемой ЛАХ и ЛАХ
исходной нескорректированной системы.
Завершив построение желаемой
ЛАХ разомкнутой системы, необходимо
определить соответствующую ей
фазо-частотную характеристику
![]() ,
и проверить наличие необходимого запаса
устойчивости системы по амплитуде
,
и проверить наличие необходимого запаса
устойчивости системы по амплитуде
![]() и
по фазе
и
по фазе
![]() .
В случае, когда при коррекции системы
указано требуемое значение показателя
колебательности
.
В случае, когда при коррекции системы
указано требуемое значение показателя
колебательности
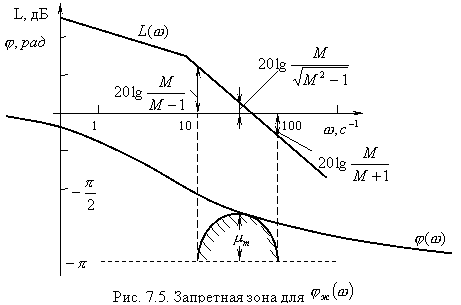
![]() ,
необходимо построить запретную зону
для
,
необходимо построить запретную зону
для
![]() (рис.
7.5).
(рис.
7.5).
Границы запретной зоны,
называемые
![]() -кривыми,
для различных значений
-кривыми,
для различных значений
![]() приведены
на рис. 7.6 . Запретная зона строится в
частотном диапазоне, в котором
приведены
на рис. 7.6 . Запретная зона строится в
частотном диапазоне, в котором
![]() <
<
![]() <
<
![]() .
.
Максимальное
значение запаса по фазе
![]() соответствует
частоте, при которой
соответствует
частоте, при которой
![]() =
=
![]() .
Величина запретной
зоны возрастает при уменьшении
.
Величина запретной
зоны возрастает при уменьшении
![]() .
Если фазо-частотная
характеристика
.
Если фазо-частотная
характеристика
![]() заходит
в запретную
зону, то фактическая величина
показателя
колебательности
заходит
в запретную
зону, то фактическая величина
показателя
колебательности
![]() превышает
максимально допустимое значение.
превышает
максимально допустимое значение.
7.3. Последовательные корректирующие устройства
В соответствии с выражением (7.1) АФХ разомкнутой скорректированной системы равна:
![]() ,
(7.5)
,
(7.5)
а логарифмические амплитудно- и фазо-частотные характеристики соответственно:
![]() ;
(7.6)
;
(7.6)
![]() .
(7.7)
.
(7.7)
Из выражений (7.6) и (7.7) следует, что амплитудно- и фазо-частотные характеристикипоследовательно корректирующего звена равны:
![]() ;
(7.8)
;
(7.8)
![]() .
(7.9)
.
(7.9)
В качестве примера на рис.7.7
приведены логарифмические частотные
характеристики разомкнутой
нескорректированной системы (
![]() и
и
![]() ).
На этом же рисунке представлена желаемая
ЛАХ скорректированной системы
).
На этом же рисунке представлена желаемая
ЛАХ скорректированной системы
![]() и
соответствующая ей фазо-частотная
характеристика
и
соответствующая ей фазо-частотная
характеристика
![]() .
В соответствии с выражением (7.8), вычитая
из желаемой ЛАХ характеристику
исходной системы
.
В соответствии с выражением (7.8), вычитая
из желаемой ЛАХ характеристику
исходной системы
![]() ,
получаем ЛАХ корректирующего звена
,
получаем ЛАХ корректирующего звена
![]() .
Приведенная на рис.7.7
.
Приведенная на рис.7.7
![]() соответствует
интегро-дифференцирующему звену:
соответствует
интегро-дифференцирующему звену:
![]()
с дифференцирующими
свойствами в среднечастотном диапазоне
(![]() >
>
![]() ).
Параметры корректирующего звена
определяются следующим образом:
).
Параметры корректирующего звена
определяются следующим образом:
![]() ;
;
![]()
![]() .
.
Значения сопрягающих частот
![]() и
и
![]() ,
а также величина
,
а также величина
![]() берутся
из рис. 7.7.
берутся
из рис. 7.7.
|
|
|
|
|
|
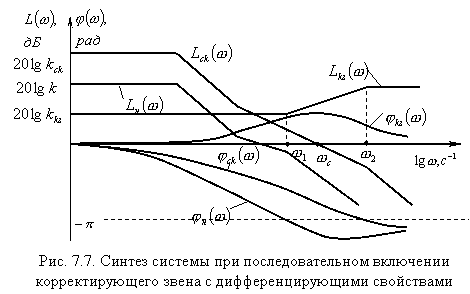
Для уточнения действительного
запаса устойчивости по модулю и фазе
синтезированной системы на рис.7.7
построена логарифмическая фазо-частотная
характеристика
![]() .
Как видно из рис. 7.7, запасы устойчивости
по фазе и по модулю скорректированной
системы больше соответствующих запасов
устойчивости исходной
системы.
.
Как видно из рис. 7.7, запасы устойчивости
по фазе и по модулю скорректированной
системы больше соответствующих запасов
устойчивости исходной
системы.
Из рассмотренного примера
следует, что достоинство коррекции с
помощью последовательных дифференцирующих
устройств заключается в том, что при
обеспечении требуемого запаса устойчивости
одновременно увеличивается частота
среза
![]() и
возможно увеличение коэффициента
усиления системы, в результате чего
уменьшаются время регулирования и
установившаяся ошибка.
и
возможно увеличение коэффициента
усиления системы, в результате чего
уменьшаются время регулирования и
установившаяся ошибка.
Однако последовательная коррекция с помощью дифференцирующих устройств имеет и недостатки, заключающиеся в значительном увеличении усиления в области высоких частот. Если при этом на полезный входной сигнал системы накладываются высокочастотные помехи, степень их подавления в скорректированной системе будет ниже, чем в нескорректированной. Помехоустойчивость системы может быть повышена путем снижения коэффициента усиления системы, но это приведет к снижению точности регулирования.
Для исключения существенного
ослабления коэффициента усиления
системы на низких частотах в качестве
последовательного корректирующего
звена можно использовать
интегро-дифференцирующее звена с
преобладающими интегрирующими свойствами,
т.е. при
![]() <
<
![]() (рис.
7.8).
(рис.
7.8).
Как видно из рис. 7.8, исходная нескорректированная система не только не обеспечивает требуемого качества регулирования, но даже является неустойчивой. Без корректирующего устройства требуемый запас устойчивости в системе можно обеспечить только за счет большого снижения коэффициента усиления системы, что является нежелательным.
Желаемую ЛАХ скорректированной системы можно получить при последовательном включении корректирующего устройства с интегрирующими свойствами. Из рис. 7.8 следует, что наряду с относительным увеличением коэффициента усиления системы на низких частотах существенно уменьшено усиление на высоких частотах и тем самым ослаблено влияние высокочастотных помех.
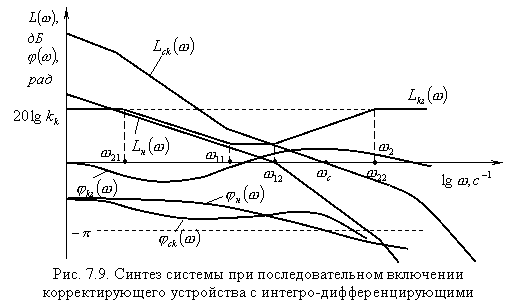
Недостатком таких корректирующих устройств является то, что при их использовании уменьшается частота среза и, следовательно, длительность переходных процессов в системе увеличивается.
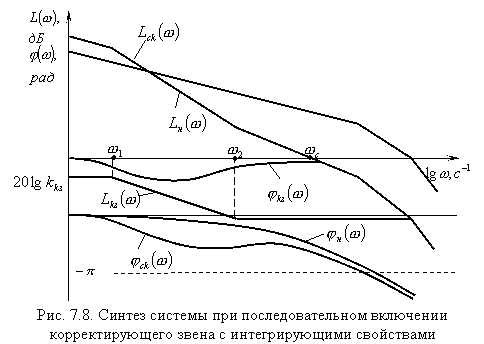
При решении практических инженерных задач по синтезу структуры САУ широкое применение находят последовательные корректирующие устройства в виде комбинированных интегро-дифференцирующих звеньев.
Пример синтеза желаемых логарифмических частотных характеристик системы с помощью последовательного комбинированного интегро-дифференцирующего звена представлен на рис.7.9.
Из рис.7.9
следует, что при правильно выбранных
параметрах корректирующего устройства
можно обеспечить требуемую точность
регулирования в установившихся режимах
и одновременно повысить качество
переходного процесса, по сравнению с
исходной системой. Передаточная функция
корректирующего звена с ЛАХ
![]() ,
приведенной на рис. 7.9, равна:
,
приведенной на рис. 7.9, равна:
![]()
![]() .
.
При выборе коэффициента
усиления корректирующего устройства
![]() следует
исходить из условия обеспечения требуемой
точности в установившихся режимах
скорректированной системы. Так, если
коэффициент передачи исходной
нескорректированной разомкнутой системы
равен
следует
исходить из условия обеспечения требуемой
точности в установившихся режимах
скорректированной системы. Так, если
коэффициент передачи исходной
нескорректированной разомкнутой системы
равен
![]() ,
а
требуемый коэффициент
передачи скорректированной системы
равен
,
а
требуемый коэффициент
передачи скорректированной системы
равен
![]() ,
то коэффициент передачи корректирующего
устройства должен быть равен:
,
то коэффициент передачи корректирующего
устройства должен быть равен:
![]() .
.
Постоянные времени
корректирующего устройства
![]() и
и
![]() необходимо
выбирать так, чтобы частоты сопряжения
необходимо
выбирать так, чтобы частоты сопряжения
![]() и
и
![]() были
бы значительно меньше частоты среза
были
бы значительно меньше частоты среза
![]() скорректированной
системы. Этим обеспечивается сдвиг
интервала частот, в котором
корректирующее устройство создает
отставание по фазе в безопасную зону
слева от частоты среза.
скорректированной
системы. Этим обеспечивается сдвиг
интервала частот, в котором
корректирующее устройство создает
отставание по фазе в безопасную зону
слева от частоты среза.
Частоты сопряжения
![]() и
и
![]() должны
быть такими, чтобы частота среза
должны
быть такими, чтобы частота среза
![]() располагалась
бы примерно в середине интервала частот
располагалась
бы примерно в середине интервала частот
![]() <
<![]() <
<![]() .
В этом случае максимальное опережение,
создаваемое корректирующим устройством,
будет в области частоты среза, что
обеспечивает в скорректированной
системе наибольший запас устойчивости
по фазе.
.
В этом случае максимальное опережение,
создаваемое корректирующим устройством,
будет в области частоты среза, что
обеспечивает в скорректированной
системе наибольший запас устойчивости
по фазе.
Зачастую не все из перечисленных рекомендаций по выбору параметров корректирующего устройства удается удовлетворить в полной мере. Поэтому необходимо построить ЛАХ скорректированной системы с учетом фактических логарифмических частотных характеристик корректирующего устройства и проверить, например, путем моделирования системы на ЭВМ, удовлетворяет ли САУ предъявляемым требованиям к качеству регулирования.