

Построение лах в низкочастотном диапазоне
На низкочастотном участке,
где вид
![]() определяется
в основном требованиями к точности
регулирования, а следовательно,
величиной коэффициента усиления системы,
порядком ее астатизма, значением
коэффициента ошибки и т.д.
определяется
в основном требованиями к точности
регулирования, а следовательно,
величиной коэффициента усиления системы,
порядком ее астатизма, значением
коэффициента ошибки и т.д.
Если в системе, отрабатывающей
ступенчатый входной сигнал
![]() ,
допустимая статическая ошибка не должна
превышать значения
,
допустимая статическая ошибка не должна
превышать значения
![]() ,
то в соответствии с выражением (5.2)
величина коэффициента усиления
разомкнутой скорректированной системы:
,
то в соответствии с выражением (5.2)
величина коэффициента усиления
разомкнутой скорректированной системы:
![]() ≥
≥
![]() –
1.
–
1.
При этом на участке низких
частот желаемая ЛАХ проводится параллельно
оси абсцисс
с ординатой
![]() .
В случае, когда статическая ошибка
недопустима (
.
В случае, когда статическая ошибка
недопустима (![]() =
0), то скорректированная
система должна быть астатической.
=
0), то скорректированная
система должна быть астатической.
Если в
астатической системе с астатизмом
первого порядка требуется обеспечить
слежение
за сигналом
![]() ,
то ее коэффициент усиления, согласно
выражению (5.2) определяется величиной
максимально допустимой ошибки по
скорости
,
то ее коэффициент усиления, согласно
выражению (5.2) определяется величиной
максимально допустимой ошибки по
скорости
![]() :
:
![]() ≥
≥
![]() .
.
При этом уравнение низкочастотного участка желаемой ЛАХ:
![]() .
.
При синтезе следящих систем,
входной сигнал которых заранее неизвестная
функция времени, обычно указываются
только максимально возможные значения
скорости (![]() )
и ускорения (
)
и ускорения (![]() )
входного сигнала и задаются требованием
к величине максимально допустимой
динамической ошибке регулирования
(
)
входного сигнала и задаются требованием
к величине максимально допустимой
динамической ошибке регулирования
(![]() ).
В этом случае подбирается эквивалентное
гармоническое воздействие
).
В этом случае подбирается эквивалентное
гармоническое воздействие
![]() ,
амплитуда и частота которого
определяется значениями
,
амплитуда и частота которого
определяется значениями
![]() и
и
![]() :
:
![]() и
и
![]() .
(7.3)
.
(7.3)
При воспроизведении линейной
следящей системой эквивалентного
гармонического воздействия ошибка
регулирования также будет гармонической
с той же частотой
![]() и
амплитудой
и
амплитудой
![]() .
Следовательно:
.
Следовательно:
![]() ,
т.е.
,
т.е.
![]()
![]() .
.
Полагая
![]() >>
1, имеем
>>
1, имеем
![]()
![]() ,
откуда с учетом выражения (7.3):
,
откуда с учетом выражения (7.3):
![]()
![]()
![]()
![]() .
(7.4)
.
(7.4)
И з
выражения (7.4) следует, что эквивалентное
входное воздействие будет воспроизводиться
следящей системой с ошибкой, не превышающей
з
выражения (7.4) следует, что эквивалентное
входное воздействие будет воспроизводиться
следящей системой с ошибкой, не превышающей
![]() ,
если при
,
если при
![]() ордината
желаемой ЛАХ будет не менее
ордината
желаемой ЛАХ будет не менее
![]() .
.
Точку К
с координатами (![]() ;
;![]() )
называют контрольной
точкой (рис.
7.2). На этом рисунке указаны две прямые,
пересекающиеся в точке К,
имеющие наклон -20
дБ/дек при
)
называют контрольной
точкой (рис.
7.2). На этом рисунке указаны две прямые,
пересекающиеся в точке К,
имеющие наклон -20
дБ/дек при
![]() <
<
![]() и
-40 дБ/дек при
и
-40 дБ/дек при
![]() >
>
![]() .
Уравнения этих прямых получены на
основании выражения (7.4) при уменьшении
скорости и ускорения входного
сигнала по отношению к их максимально
возможным значениям. Данные прямые
представляют собой границы запретной
зоны для желаемой ЛАХ следящей системы
с астатизмом первого порядка.
.
Уравнения этих прямых получены на
основании выражения (7.4) при уменьшении
скорости и ускорения входного
сигнала по отношению к их максимально
возможным значениям. Данные прямые
представляют собой границы запретной
зоны для желаемой ЛАХ следящей системы
с астатизмом первого порядка.
Построение лах в среднечастотном диапазоне
На среднечастотном участке
желаемая ЛАХ в наибольшей степени
зависит от требования к динамическим
показателям качества регулирования,
например, показателю колебательности,
времени регулирования и перерегулирование.
На этом участке находится частота
среза
![]() и
определяется запас устойчивости по
фазе.
и
определяется запас устойчивости по
фазе.
Если качество регулирования системы оценивается по величине перерегулирования и времени регулирования, то, задавшись максимально допустимыми значения указан
ных показателей σ и tp, следует воспользоваться номограммой (рис. 7.3). По заданной величине перерегулирования (например, σ = 20 %), определяется величина tp:
![]()
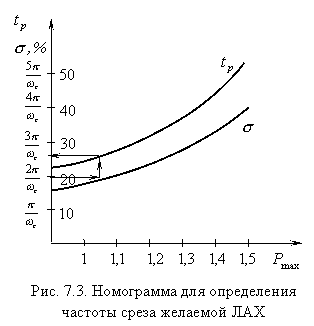 ,
,
где
![]() –
частота среза желаемой ЛАХ.
–
частота среза желаемой ЛАХ.
Поскольку допустимое значение tp задано, то можно вычислить необходимую частоту среза:
![]() .
.
Вид
желаемой ЛАХ в среднечастотном диапазоне
должен гарантировать необходимый запас
устойчивости системы по фазе, что в
максимальной степени обеспечивается,
когда
![]() в
районе частоты среза имеет достаточно
протяженный участок с наклоном -20
дБ/дек.
в
районе частоты среза имеет достаточно
протяженный участок с наклоном -20
дБ/дек.
Типы четырех возможных ЛАХ, удовлетворяющих этому условию, приведены в таблице 7.1. ЛАХ типа А и С соответствуют статическим системам, а ЛАХ типа B и D-астатическим системам с астатизмом первого порядка.
Таблица 7.1
|
Тип ЛАХ |
Наклоны асимптот, дБ/дек | |||
|
Низкочастотный участок |
Сопряженный участок |
Среднечастотный участок |
Высокочастотный участок | |
|
А |
0 |
- 40 |
- 20 |
- 40 |
|
B |
- 20 |
- 40 |
- 20 |
- 40 |
|
C |
0 |
- 40 |
- 20 |
- 60 |
|
D |
- 20 |
- 40 |
- 20 |
- 60 |
Для ЛАХ (рис. 7.4) примем
следующие обозначения:
![]() –
протяженность среднечастотного участка
–
протяженность среднечастотного участка
![]() ;
;
![]() -
протяженность участка желаемой ЛАХ, по
которому сопрягаются низкочастотный
и среднечастотный участки
-
протяженность участка желаемой ЛАХ, по
которому сопрягаются низкочастотный
и среднечастотный участки
![]() .
.
Имеется несколько рекомендаций
по выбору частот
![]() и
и
![]() .
Например, выбирают
.
Например, выбирают
![]() и
и
![]() /
/![]() .
Наиболее простой является рекомендация,
согласно которой интервалы частот (
.
Наиболее простой является рекомендация,
согласно которой интервалы частот (![]() –
–
![]() )
и (
)
и (![]() –
–
![]() )
принимают равными 0,5…0,9 декады. Еще один
подход к выбору протяженности
среднечастотного участка накладывает
ограничение на абсолютную величину
)
принимают равными 0,5…0,9 декады. Еще один
подход к выбору протяженности
среднечастотного участка накладывает
ограничение на абсолютную величину
![]() и
и
![]() ,
которая должны быть не ниже значений,
определенных по специальной номограмме
(обычно эти значения находятся в пределах
от 12 до 16 дБ).
,
которая должны быть не ниже значений,
определенных по специальной номограмме
(обычно эти значения находятся в пределах
от 12 до 16 дБ).
Е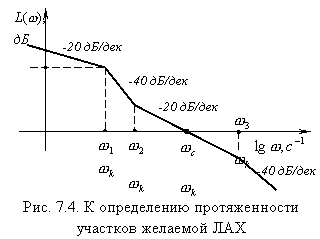 сли
качество регулирования системы
оценивается по величине показателя
колебательности
сли
качество регулирования системы
оценивается по величине показателя
колебательности
![]() ,
то для определения протяженности
участков
,
то для определения протяженности
участков
![]() и
и
![]() можно
воспользоваться данными, приведенными
в таблице 7.2.
можно
воспользоваться данными, приведенными
в таблице 7.2.
Выбор граничных частот
среднечастотного участка согласно
приведенным рекомендациям дает несколько
различные результаты. При окончательном
их выборе следует исходить из того, что
чем шире интервал частот (![]() ;
;
![]() ),
тем лучше будет переходный процесс.
Однако практическая реализация желаемой
ЛАХ при этом усложняется и, кроме того,
излишняя протяженность среднечастотного
участка снижает динамичность системы.
),
тем лучше будет переходный процесс.
Однако практическая реализация желаемой
ЛАХ при этом усложняется и, кроме того,
излишняя протяженность среднечастотного
участка снижает динамичность системы.
Таблица 7.2