

Определение оптимальной передаточной функции системы управления
Назначение
любой системы управления изменять
выходную величину х(t)
по определенному закону и устранять
влияние возмущений на эту величину. В
общем случае автоматическая система
должна воспроизводить на своем выходе
не само воздействие
![]() ,
а некоторый требуемый сигнал
,
а некоторый требуемый сигнал
![]() ,
связанный с сигналом
,
заданным
соотношением
,
связанный с сигналом
,
заданным
соотношением
![]() , (11.2.26)
, (11.2.26)
где
![]() —
заданный оператор идеального
преобразования входного сигнала.
—
заданный оператор идеального
преобразования входного сигнала.
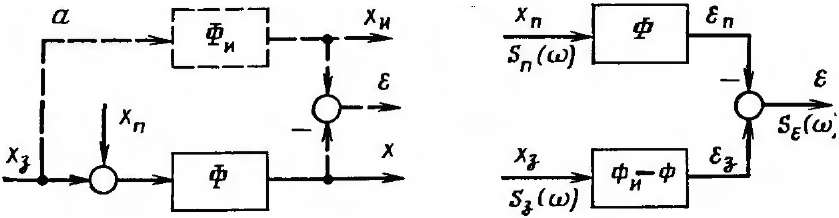
Рис. 11.2.2 Алгоритмические схемы к задаче Винера
Вид
оператора
зависит от назначения системы. В системах
воспроизведения, к которым относятся
следящие и стабилизирующие системы,
![]() .
Если обратная связь в системе
воспроизведения неединичная с
коэффициентом
.
Если обратная связь в системе
воспроизведения неединичная с
коэффициентом
![]() ,
то оператор
равен постоянному числу
,
то оператор
равен постоянному числу
![]() .
.
Из-за
того, что на входе системы кроме полезного
сигнала
![]() действует помеха хп,
идеальное преобразование согласно
заданному оператору
,
как правило, невозможно. Сигнал х(t)
на выходе реальной системы Ф(р)
(рис. 11.2.2,
а)
почти всегда отличается от идеального
выходного сигнала на величину сигнала
ошибки
действует помеха хп,
идеальное преобразование согласно
заданному оператору
,
как правило, невозможно. Сигнал х(t)
на выходе реальной системы Ф(р)
(рис. 11.2.2,
а)
почти всегда отличается от идеального
выходного сигнала на величину сигнала
ошибки
![]() .
В связи с этим возникает задача синтеза
такой структуры системы, которая
обеспечивала бы наилучшее, в том или
ином смысле, приближение к идеальному
преобразованию Фи
(р).
.
В связи с этим возникает задача синтеза
такой структуры системы, которая
обеспечивала бы наилучшее, в том или
ином смысле, приближение к идеальному
преобразованию Фи
(р).
Критерием точности приближения реальной структуры к идеальной может служить условие минимума дисперсии сигнала ошибки е.
Задача синтеза структуры линейной системы, оптимальной по критерию (11.1.3) при стационарных случайных воздействиях, была впервые сформулирована и решена Н. Винером, поэтому она называется задачей Винера.
Рассмотрим
упрощенное решение задачи Винера
применительно к расчетной схеме (рис.
11.2.2,6),
которая эквивалентна исходной (см. рис.
11.2.2,
а).
Будем полагать, что входные воздействия
![]() и
и
![]() не коррелированы между собой.
Следовательно, и составляющие
не коррелированы между собой.
Следовательно, и составляющие
![]() и
и
![]() сигнала ошибки будут независимы друг
от друга. Поэтому спектральную плотность
сигнала
сигнала ошибки будут независимы друг
от друга. Поэтому спектральную плотность
сигнала
![]() можно определить как простую сумму
(11.1.31) [а не (11.1.30)!]:
можно определить как простую сумму
(11.1.31) [а не (11.1.30)!]:
 (11.2.27)
(11.2.27)
Дисперсия сигнала ошибки равна интегралу спектральной плотности (11.2.27):
![]() (11.2.28)
(11.2.28)
Задача
Винера заключается в определении такой
частотной передаточной функции
![]() замкнутой системы, которая обеспечивает
минимум дисперсии
замкнутой системы, которая обеспечивает
минимум дисперсии
![]() Для решения этой задачи формулу (11.2.28)
необходимо преобразовать: представить
в форме, при которой искомая функция
Для решения этой задачи формулу (11.2.28)
необходимо преобразовать: представить
в форме, при которой искомая функция
![]() входит только в одно слагаемое
подынтегрального выражения (выкладки
здесь не приводятся):
входит только в одно слагаемое
подынтегрального выражения (выкладки
здесь не приводятся):
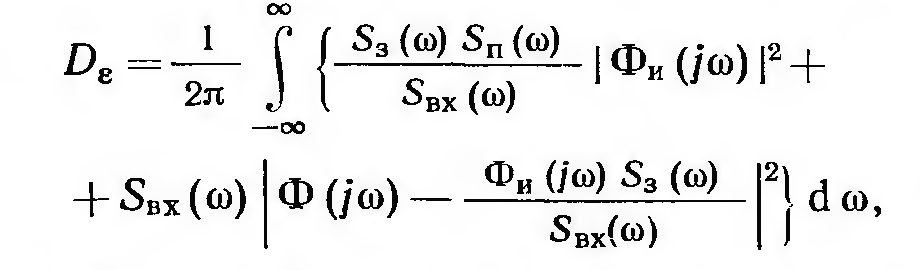 (11.2.29)
(11.2.29)
где
![]() —
спектральная плотность суммарного
входного сигнала.
—
спектральная плотность суммарного
входного сигнала.
В
первое слагаемое интеграла (11.2.29)
не входит функция
![]() ,
и на него нельзя повлиять при выборе
вида этой функции. Второе слагаемое
можно изменять при выборе функции
.
Так как оба слагаемых неотрицательны,
то условием минимума дисперсии
является равенство
,
и на него нельзя повлиять при выборе
вида этой функции. Второе слагаемое
можно изменять при выборе функции
.
Так как оба слагаемых неотрицательны,
то условием минимума дисперсии
является равенство
![]() (11.2.30)
(11.2.30)
Отсюда оптимальная передаточная функция замкнутой системы
![]() (11.2.31)
(11.2.31)
Оптимальная
передаточная функция зависит от вида
заданного оператора идеального
преобразования
![]() и соотношения спектральных плотностей
задающего воздействия и помехи.
и соотношения спектральных плотностей
задающего воздействия и помехи.
При
отсутствии помехи
![]() оптимальная
функция равна заданному оператору
идеального преобразования:
оптимальная
функция равна заданному оператору
идеального преобразования:
![]() (11.2.32)
(11.2.32)
Если
помеха представляет собой белый шум и
ее интенсивность
![]() намного больше уровня полезного сигнала
намного больше уровня полезного сигнала
![]() ,
то оптимальная частотная характеристика
системы воспроизведения
,
то оптимальная частотная характеристика
системы воспроизведения
![]()
![]() (11.2.33)
(11.2.33)
т. е. повторяет форму кривой спектральной плотности задания.
Частотные
функции, определяемые выражением
(11.2.31),
оказываются, как правило, физически
нереализуемыми: им соответствуют
весовые функции
![]() отличные от нуля при
t<0.
отличные от нуля при
t<0.
Оптимальную
частотную функцию, удовлетворяющую
условию физической реализуемости
![]() при
t<0,
можно определить по
формуле Колмогорова-Винера,
которая вытекает из (11.2.31):
при
t<0,
можно определить по
формуле Колмогорова-Винера,
которая вытекает из (11.2.31):
 (11.2.34)
(11.2.34)
где
![]() —
частотная функция формирующего фильтра,
соответствующего спектральной плотности
—
частотная функция формирующего фильтра,
соответствующего спектральной плотности
![]() ,
т. е.
,
т. е.
![]() (11.2.35)
(11.2.35)
Квадратные
скобки со знаком «+» означают, что второй
сомножитель — функция, имеющая нули и
полюсы только в верхней полуплоскости
![]() (или в левой полуплоскости р). Для того,
чтобы найти этот сомножитель, необходимо
разложить выражение в скобках на сумму
простых дробей и отбросить все дроби,
имеющие нули и полюса в нижней
полуплоскости
.
(или в левой полуплоскости р). Для того,
чтобы найти этот сомножитель, необходимо
разложить выражение в скобках на сумму
простых дробей и отбросить все дроби,
имеющие нули и полюса в нижней
полуплоскости
.
Если
синтезируемая система должна включать
в себя какую-либо неизменяемую часть,
например, объект
![]() ,
то оптимальную функцию изменяемой
части, например, регулятора, можно найти
по общей функции
,
то оптимальную функцию изменяемой
части, например, регулятора, можно найти
по общей функции
![]() .Так,
оптимальная частотная функция регулятора
типовой системы (см. рис. 4.7)
.Так,
оптимальная частотная функция регулятора
типовой системы (см. рис. 4.7)
![]() . (11.2.36)
. (11.2.36)
Следует
отметить, что степень числителя функции
![]() часто
оказывается больше степени знаменателя.
Это создает трудности технической
реализации получаемых функций, особенно
в тех случаях, когда объект содержит
запаздывание
часто
оказывается больше степени знаменателя.
Это создает трудности технической
реализации получаемых функций, особенно
в тех случаях, когда объект содержит
запаздывание
![]() .
Как видно из формулы (11.2.36),
регулятор при этом должен содержать
идеальный упредитель с передаточной
функцией
.
Как видно из формулы (11.2.36),
регулятор при этом должен содержать
идеальный упредитель с передаточной
функцией
![]() .
Такую функцию можно реализовать только
приближенно.
.
Такую функцию можно реализовать только
приближенно.
Минимальная
дисперсия
![]() ,
которая теоретически достижима при
оптимальной передаточной функции,
равна интегралу от первого слагаемого
в выражении (11.2.29):
,
которая теоретически достижима при
оптимальной передаточной функции,
равна интегралу от первого слагаемого
в выражении (11.2.29):
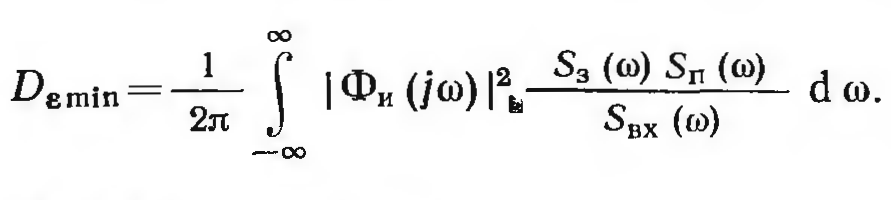 (11.2.37)
(11.2.37)
Из (11.2.37) следует, что предельно достижимая точность системы тем выше, чем меньше перекрываются спектры задающего воздействия и помехи.
В
физически реализуемой системе из-за
различия функций
![]() и
дисперсия
(11.2.37)
возрастает на некоторую величину
и
дисперсия
(11.2.37)
возрастает на некоторую величину
![]() и становится равной
и становится равной
![]() (11.2.38)
(11.2.38)
где
знак «—» у квадратной скобки означает,
что сомножитель имеет только нижние
нули и полюса в плоскости
![]() .
.
Выражение
(11.2.38)
определяет предельную точность
синтезируемой системы. Дисперсия
![]() принципиально
неустранима никакими техническими
средствами.
принципиально
неустранима никакими техническими
средствами.
Если
на стадии технической реализации
передаточная функция
![]() будет изменена, то точность дополнительно
ухудшится.
будет изменена, то точность дополнительно
ухудшится.
На
предельную точность оказывает сильное
влияние запаздывание объекта и помехи
в канале измерения. Чем больше
запаздывание![]() и выше уровень помехи
и выше уровень помехи
![]() ,
тем ниже предельная точность. Например,
в системе стабилизации (рис. 8.7,
а)
минимально достижимая дисперсия
,
тем ниже предельная точность. Например,
в системе стабилизации (рис. 8.7,
а)
минимально достижимая дисперсия
![]() становится
равной дисперсии
DB
возмущения
хв
(т. е. система становится бесполезной),
когда
становится
равной дисперсии
DB
возмущения
хв
(т. е. система становится бесполезной),
когда
![]() (11.2.39)
(11.2.39)
или
![]() (11.2.40)
(11.2.40)
где
DB
и
![]() —
параметры возмущения
хв
типа (11.1.36).
—
параметры возмущения
хв
типа (11.1.36).
При
совместном действии обоих факторов
(запаздывания и помехи) система становится
бесполезной при меньшем запаздывании
![]() и меньшем уровне
и меньшем уровне
![]()